非共轴长波红外偏振成像系统设计
2017-03-22姚锦华夏润秋金伟其
王 霞,姚锦华,夏润秋,金伟其
非共轴长波红外偏振成像系统设计
王 霞,姚锦华,夏润秋,金伟其
(北京理工大学 光电成像技术与系统教育部重点实验室,北京 100081)
围绕长波红外偏振成像系统的硬件研制、系统校正和基本性能指标测试3方面工作,构建了较为完整的成像技术方案:从方案选择、系统组成、光学部件、电路原理介绍了系统的硬件研制;分析了系统四通道响应非一致性的来源,阐述了分段线性校正法的基本原理,并展现了其对四通道红外图像的校正效果;通过实验测量得到单通道NETD值约为60mK,并绘制了单通道MRTD性能曲线,基于对应特征点统计得到了系统成像中心位置偏差约为4个像素,图像配准误差约为1.2个像素。最后,给出了车辆目标的长波红外偏振信息解算图像。
偏振成像系统;非一致性校正;性能测试
0 引言
红外偏振成像技术作为一种新型成像技术,在近些年中越来越多地被运用于目标探测、特征识别等军用及民用领域[1]。红外偏振成像技术通过获取不同偏振方向的光强图像,从中解算得到景物光波的斯托克斯矢量和偏振度、偏振角等偏振维度信息,因此其对于红外强度成像技术是一种良好的技术补充手段。国外从20世纪60年代开始,从理论和目标特性实验、系统构成、应用3方面对红外偏振成像技术进行了研究[2]。其中作为测量与分析目标场景辐射偏振特性的主要工具,红外偏振成像系统的研究显得格外基础且重要[3]。
本文主要围绕非共轴长波红外偏振成像系统的硬件研制以及后续的系统校正、基本性能指标测试工作展开。
1 非共轴红外偏振成像系统硬件研制
1.1 系统方案的选择
由于红外焦平面探测器的工艺已比较成熟,当前主流的被动偏振成像系统中基本都采用焦平面探测器。偏振成像系统主要可以分为4大类:时间分割型、振幅分割型、孔径分割型、焦平面分割型[4]。结合实验室一般的应用需求分析以上系统方案:时间分割型系统不能实时成像,无法满足运动目标的应用场景;振幅分割型系统能量利用率低,系统分光元件较多、体积大,应用于长波红外波段具有一定难度;焦平面分割型对加工工艺要求颇高,微偏振元件和探测器像元的集成难度大[5]。因此,本文采用的方案为非共轴型设计方案,其可归类为孔径分割型系统。非共轴型偏振成像系统的优势主要有[6]:结构简单、紧凑,易于实现;无运动部件,可靠性较高;能对运动目标实时成像等。
1.2 系统组成及其基本原理
非共轴型偏振成像系统采用的是同时偏振成像方式,系统共有4组长波热像仪,在空间结构上呈‘田’字分布,各通道视场共轴[7]。其中3路带有红外偏振片,分别采集0°、60°、120°偏振角度图像,还有一路非偏通道直接采集强度图像,通过系统后端的四通道信号采集电路同时采集4个通道成像机芯的实时图像,并通过Cameralink接口将数据输出存储至电脑,最后依据公式(1)解算得到斯托克斯矢量以及偏振度图像、偏振角图像:

式中:(0°)、(60°)、(120°)为3路带偏通道图像;、、为斯托克斯矢量;Dolp为偏振度图像;Aop为偏振角图像。
图1为系统总体组成示意图,图2为系统实物图。
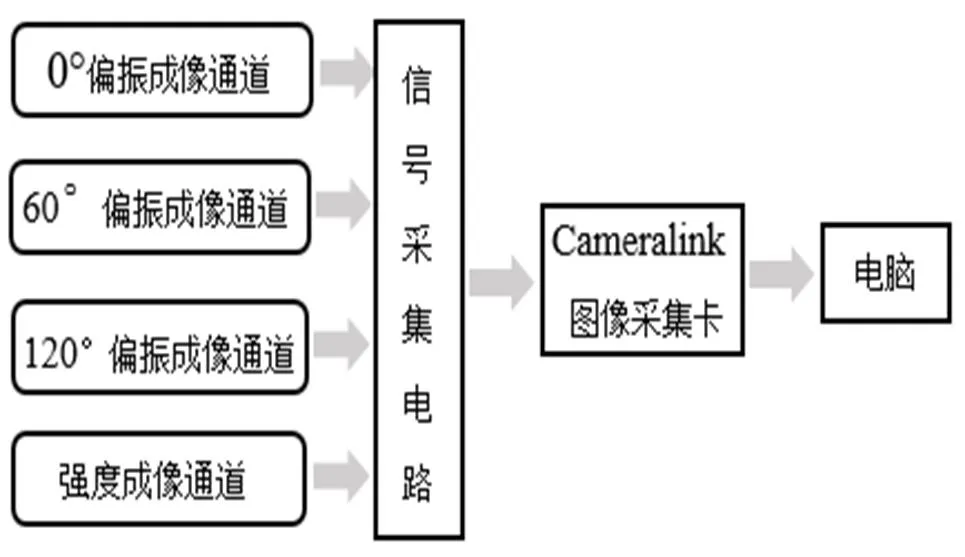
图1 系统组成示意图
1.3 系统光学部分组成
单个偏振成像通道由红外镜头、偏振片、长波红外机芯构成,本系统采用偏振片后置结构,即偏振片的空间位置处于红外镜头与长波红外机芯之间。倘若采用偏振片前置结构即将偏振片放置于系统前端,曝露在外的镜面易被人为触碰划伤,并且空气灰尘烟雾污染将对偏振片性能造成不可逆的严重影响,而将偏振片后置于光路之中则能降低其使用损耗。图3所示为实验室曝露使用一段时间后的受污染偏振片,易见其损伤较大,将严重影响工作性能。

图2 系统实物图
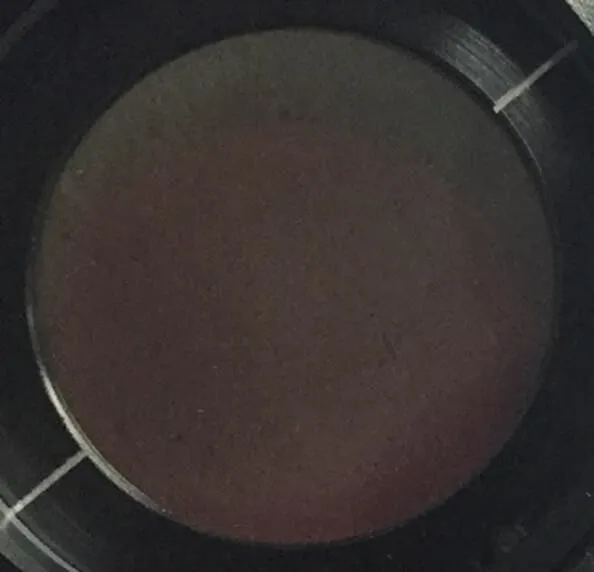
图3 受到海边盐雾污染的偏振片镜面
系统光学部分主要元器件选型及性能如表1所示。

表1 光学器件主要参数
1.4 信号采集电路工作流程
系统采用的信号采集电路以可编程逻辑器件FPGA为核心处理器件,外设配有电源及FPGA配置电路、数据缓存SRAM、Cameralink输出端接口等工作模块,对4个通道红外成像机芯进行同时的图像采集及输出。
信号采集电路主要由以下两个电路板模块组成:数据传输板、数据处理板。其中数据传输板与4个通道的信号输出接口相连接,且配置有一个Cameralink输出接口。电路工作流程如图4所示。外界电源提供5V电压分别为数据处理板与数据传输板供电;数据处理板上电后启动FPGA,读取存储于FLASH中的配置数据,再通过数据传输板同步采集4个通道机芯的图像信号,并将同时的4个图像拼接成一个大图像(4幅336×256的图像拼接为1幅672×512的图像);数据处理板上的4片SRAM作为来自不同机芯的图像缓存,SDRAM为图像处理缓存;完成拼接处理的图像,通过数据传输板上的Cameralink接口输出至电脑。

图4 电路工作原理图
2 系统四通道响应非一致性校正
2.1 响应非一致性来源
四通道红外偏振成像系统采用了4台独立的红外机芯,探测器工艺自身不可避免地导致各个探测器之间的响应差异,且各通道采用的红外镜头同样会由于工艺原因导致成像性能差异。若直接采用各通道的灰度响应测量值,计算得到的场景偏振信息可能存在较大的误差,所以必须先对四通道的响应非一致性进行校正,使得各通道对于同一强度的完全非偏振光响应一致[8]。
2.2 实验装置与方法
实验装置主要有温度可调黑体源与平行光管,如图5所示。黑体源产生的非偏振光通过平行光管准直后能被偏振系统各通道响应,待系统工作状态稳定之后,记录下50帧图像数据再取得平均数,即为某一温度下系统对于黑体源的响应值。实验中以4K为温度间隔宽度,采集了由0℃~170℃(高于130℃温度时探测器响应灰度值趋近于饱和)区间范围内的黑体响应,此温度区间基本能够满足常见的实验环境参数。最终得到的系统各通道响应曲线如图6所示,容易看出,各通道的灰度-温度对应曲线的差异明显,亟待校正。

图5 温度可调黑体源设备

图6 红外机芯灰度-目标温度对应曲线
2.3 非一致性校正方案
由图6可以看出,在黑体温度约为0℃~130℃的范围之内,各通道实际的灰度响应值与黑体温度之间呈明显的非线性关系,倘若采用简单的两点式校正方法会存在较大的误差。而通过进一步观察可知,如果将整个黑体温度区间分割成若干个子区间,则在任意一小段温度区间内响应灰度值与温差均接近于线性关系,即构成近似线性响应子区间。在每个近似线性响应子区间中,输入目标温度与输出灰度即可认为近似成线性关系[9],即:
=×+(2)
式中:代表温度;代表输出灰度;和分别为增益和偏置。
设4台长波红外机芯对于同一温度的响应输出灰度分别为1、2、3、4,则通过线性计算可将响应灰度值校正成一致,即:
1=2×2+2=3×3+3=4×4+4(3)
式中:2和2为第二台机芯的校正增益和校正偏置,其他系数同理对应。
校正实验过程如下:
记录下低温℃时,4台红外机芯的成像灰度值1、2、3、4。
记录下高温℃时,4台红外机芯的成像灰度值1、2、3、4。
则根据式(3),有:
1=2×2+2=3×3+3=4×4+4(4)
1=2×2+2=3×3+3=4×4+4(5)
可解得:


同理可解得3和3,4和4,即可得到3台红外机芯相对于一台标准红外机芯在较小间隔温度子区间内的校正增益和校正偏置。
综上所述,可以对整个温度响应区间进行合理的分段,使得每一小段温度区间均构成一个近线性响应区间。以上即为分段线性方法用于各通道非一致性校正的基本原理,利用分段线性校正法即可完成对各通道响应灰度的校正。
对应于本系统各通道的响应曲线,每隔4K取做一个线性响应区间,应用分段线性校正法对系统完成各通道非一致性响应的校正,由此得到的各图像方可应用于解算偏振信息。
使用偏振系统对一城市场景进行长波红外偏振成像,将各通道图像线性拉伸至相同的灰度区间。图7显示为非一致性校正前的四通道图像,易见各通道图像存在灰度响应差异;图8显示为分段线性校正后的四通道图像,可见校正后3个偏振通道灰度响应非一致性得到较好改善。
3 系统主要性能指标测试与分析
3.1 探测器NETD
噪声等效温差NETD定义是在视场中产生的输出信号值等于噪声均方根值时的目标和背景之间温度差,也就是系统能够识别的最小信号值。探测器的NETD指标能够表述成像器件噪声状况。
由于系统采用新的镜头代替FLIR红外探测器的原配镜头,所以新的成像通道的NETD值会发生改变。因此,实际测试各个成像通道的NETD数值,对分析系统整体的成像性能有重要作用。利用实验室的红外成像系统综合测试仪对系统成像焦平面进行NETD测量,采用国标对焦平面成像的热像仪进行NETD的计算,其具体步骤如下[10]:
1)获取无信号输入背景灰度数据DS(,),记录下采集图像大小(336×256)以及采集帧数;
3)计算背景响应电压的样本均方差,获取像元噪声(时间噪声)N,即:


Fig.7 Images of four channels before correction

图8 校正后四通道图像
Fig.8 Images of four channels after correction
5)计算大温差D下的像元与背景像元平均值差:设置温差为D,采集目标数据,得到目标与背景的像元平均值差S,即:
S=B-G(11)
6)据下式计算NETD:

实验统计可得,本系统各通道的NETD数值均在60mK左右,性能保持良好。
3.2 单通道MRTD
单通道的MRTD值反映了系统的热灵敏度特性以及系统的空间分辨力,因此这个参数指标能较好地体现系统基本性能。
MRTD测试基本步骤为[11]:
1)根据红外机芯参数,确定测试频率点,选择相应目标靶;
2)首先选择测试的最低频率目标靶,从环境温度开始,逐渐增加温度,直到人眼恰好能分辨条纹图像记录此时的温差作为1,逐步降低黑体温度,使其小于背景温度,直到再次出现目标,记录温差2,取正负温度MRTD的差值平均作为此空间频率下的MRTD测量结果,即:

3)同样地,测试得到其他频率目标靶下的MRTD数值,绘制MRTD特性拟合曲线(如图9所示)。
3.3 成像中心位置偏差及图像配准误差
由于4个成像通道非共轴,红外机芯空间放置存在一定间距,假设光轴完全平行,对于同一场景成像也存在中心位置偏差。而且,考虑到机械装配精度等因素的影响,系统实际成像中心位置偏差值将更大。实际应用中,中心位置偏差需要控制在一定的误差范围内,否则会对系统的实际有效观测距离产生影响。因此,系统各通道实际成像中心位置偏差需要通过实验测量获得。
对室外远处场景进行实验数据采集,可得4个通道成像图像,首先对其中两个通道图像使用SURF特征点匹配方法得到两幅图中相匹配的特征点坐标,选取一定数量的坐标点,统计各对应特征点坐标的位置偏差值,计算平均值,即可认为此平均偏差值为两幅图像的成像位置偏差值。同样地,用相同方法分别对其他通道图像进行两两统计,最终得到成像位置偏差平均值,即为系统的成像中心位置偏差。图10展示了使用SURF特征点匹配后,两幅图像特征点的对应情况。

图10 图像特征点对应曲线
Fig.10 Curves of feature points
经过几组测试实验,得到系统成像中心位置偏差约为4个像素,满足多数条件下观测距离的要求。
非共轴四通道成像系统得到的实验图像需要经过图像配准之后,才能够用于偏振信息解算。然而受限于机械装配精度等因素的影响,光轴平行度存在一定偏差,各通道内部安装精度也有限,系统各通道图像两两之间无法达到完全一致的配准,即存在图像配准误差。
对各通道图像进行基于SURF特征点的配准之后,再通过人眼主观检查及调试,以使其达到最佳配准状态。接着,利用同上求取成像位置偏差值的方法,求得经配准后图像的配准误差值。经过实验及数据统计得,系统配准误差大小约为1.2个像素。而依据以上对应特征点匹配的方法得到系统配准误差,并没有考虑各通道几何成像差异,因此实际系统配准误差要比简单的理论计算更大。
4 实验结果
使用本系统对室外车辆目标进行长波红外偏振成像,得到的偏振度图像、偏振角图像及斯托克斯矢量图像分别如图11所示。

图11 偏振信息图像
Fig.11 images of polarization
5 结论
本文首先概述了长波红外偏振成像样机的系统基本结构、光学组件构成以及信号采集电路基本原理,然后通过分段线性方法改善了四通道响应非一致性,最后通过实验得到了系统的基本参数指标。
[1] 徐参军, 赵劲松, 蔡毅, 等. 红外偏振成像的几种技术方案[J]. 红外技术, 2009, 31(5): 262-266.
XU Canjun, ZHAO Jinsong, CAI Yi, et al. A summary of the mechanism of infrared polarization imaging[J]., 2009, 31 (5): 262-266.
[2] 王霞, 夏润秋, 金伟其, 等. 红外偏振成像探测技术进展[J]. 红外与激光工程, 2014(10): 3175-3182.
WANG Xia, XIA Runqiu, JIN Weiqi, et al. Technology progress of infrared polarization imaging detection[J]., 2014(10): 3175-3182.
[3] 姜会林, 付强, 段锦, 等. 红外偏振成像探测技术及应用研究[J]. 红外技术, 2014, 36(5): 345-349.
JIANG Huilin, FU Qiang, DUAN Jin, et al. Research on infrared polarization imaging detection technology and application[J]., 2014,36 (5): 345-349.
[4] LIU Jing, XIA Runqiu, JIN Weiqi, et al. Review of imaging polarimetry based on stocks vector[J]., 2013, 39(1): 56-62.
[5] Nordin G P, MeierJ T, DeguzmanP C, et al. Micropolarizer array of infrared imaging polarimetry[J]., 1999, 16(5): 1168-1174.
[6] Fujita K, M Nishida, Y Itoh, et al. Development of simultaneous imaging polarimeter[C]//, 2006, 6269: 62693D1-83.
[7] Pezzaniti J L, ChenaultD B, et al. A division of aperture MWIR imaging polarimeter[C]//, 2005, 5888: 58880V1-58880V12.
[8] 季尔优, 顾国华, 柏连发, 等. 三通道偏振成像系统及系统误差校正方法[J]. 光子学报, 2014(1): 98-103.
JI Eryou, GU Guohua, BAI Lianfa, et al. Three-channel polarization imaging system and system error correction method[J]., 2014(1): 98-103.
[9] 刘晓, 张磊, 王峰, 等. 偏振成像探测系统的非一致性校正方法[J]. 计算机工程, 2009, 18: 209-211.
LIU Xiao, ZHANG Lei, WANG Feng, et al. Non-uniform calibration method in polarization imaging detection system[J]., 2009, 18: 209-211.
[10] 钟文辉, 李文书, 周起勃. 焦平面热像仪NETD参数的自动测量[J]. 激光与红外, 2006(7): 565-567.
ZHONG Wenhui, LI Wenshu, ZHOU Qibo, et al. NETD auto-measuring of focal-plane thermal imaging systems[J]., 2006(7): 565-567.
[11] 田留德, 刘朝晖, 赵建科, 等. 红外热像仪MRTD测试方法研究[J]. 红外技术, 2015, 37(5): 368-373.
TIAN Liude, LIU Chaohui, ZHAO Jianke, et al. Measurement method for MRTD of infrared imaging system[J]., 2015, 37(5): 368-373.
Design of a LWIR Polarization Imaging System of Non-coaxial Type
WANG Xia,YAO Jinhua,XIA Runqiu,JIN Weiqi
(,,100081,)
A complete technical proposal of LWIR polarization imaging is set up by the hardware development, system correction and basical performances test: the introductions of hardware development are included of proposal selection, system composition, optical components, circuit principle. The source of nonuniformity response of four channels is analyzed, the fundamental of segmented linearcorrectionmethod is expounded, the result of correction of four infrared images is exhibited; NETD of single channel is measured about 60mK by experiments, the characteristic curve of MRTD is also drawn, central position deviation of system is about 4 pixels and error value of image registration is about 1.2 pixels which are calculated on account of feature points. Images of polarization of a car are presented in this paper finally.
system of polarization,correction of nonuniformity,performance test
TN216
A
1001-8891(2017)04-0293-06
2016-12-02;
2017-04-06.
王霞(1972-),女,副教授,博士生导师,主要从事光电检测、光谱分析及微光与红外成像方面的研究。E-mail:angelniuniu@bit.edu.cn。
武器装备预研基金项目。
