基于磁致伸缩效应的明渠水位测定仪研究
2017-03-22康端刚马孝义
康端刚,马孝义,,赵 龙
(1.西北农林科技大学水利与建筑工程学院,陕西杨凌 712100;2.西北农林科技大学机械与电子工程学院,陕西 杨凌 712100)
0 引 言
灌区的农业灌溉用水量在整个用水行业中占据相当大的部分,而我国现在的灌区水利用效率整体较低,自动化的量水设施比较落后,为了实现高效节约用水,对灌区明渠水位的测量就显得尤为重要。
目前灌区渠道水位测量主要采用自动式水位传感器,具体包括浮子式、压力式、超声波、雷达式和激光式等水位传感器。这几种传感器的使用条件、优缺点见表1所示。相比与上述几种水位传感器,本文设计的磁致伸缩水位传感器具有测量精度高、应用范围广、适应能力好、抗干扰能力强、测量参数多、使用寿命长、安装维护方便等优点,很适合灌区明渠水位的监测。
基于以上情况,本文设计了基于磁致伸缩效应的水位仪,以低功耗单片机MSP430F169为核心,对水位仪的激励脉冲电路、回波信号处理电路、时间测量电路做了相关设计,最后输出与水位成正比例的模拟电压信号。

表1 灌区主要水位传感器优缺点对比
1 磁致伸缩水位仪的测量原理
1.1 磁致伸缩效应
铁磁体在外磁场中被磁化时,其长度和体积均发生变化的现象,称为磁致伸缩或者磁致伸缩效应[2];相反的,铁磁体发生变形或受到应力的作用而引起材料的磁化状态发生变化的现象,称为磁致伸缩逆效应。
本水位仪的设计主要利用磁致伸缩效应中的维德曼效应[3]:使两个不同的磁场相交,产生扭转效应并激发扭转波,再利用磁致伸缩逆效应接收该扭转波产生的信号,计算出此信号被检测到的时间,就可计算出水面的位置。
1.2 磁致伸缩水位仪原理
磁致伸缩水位传感器的系统结构如图1所示 。
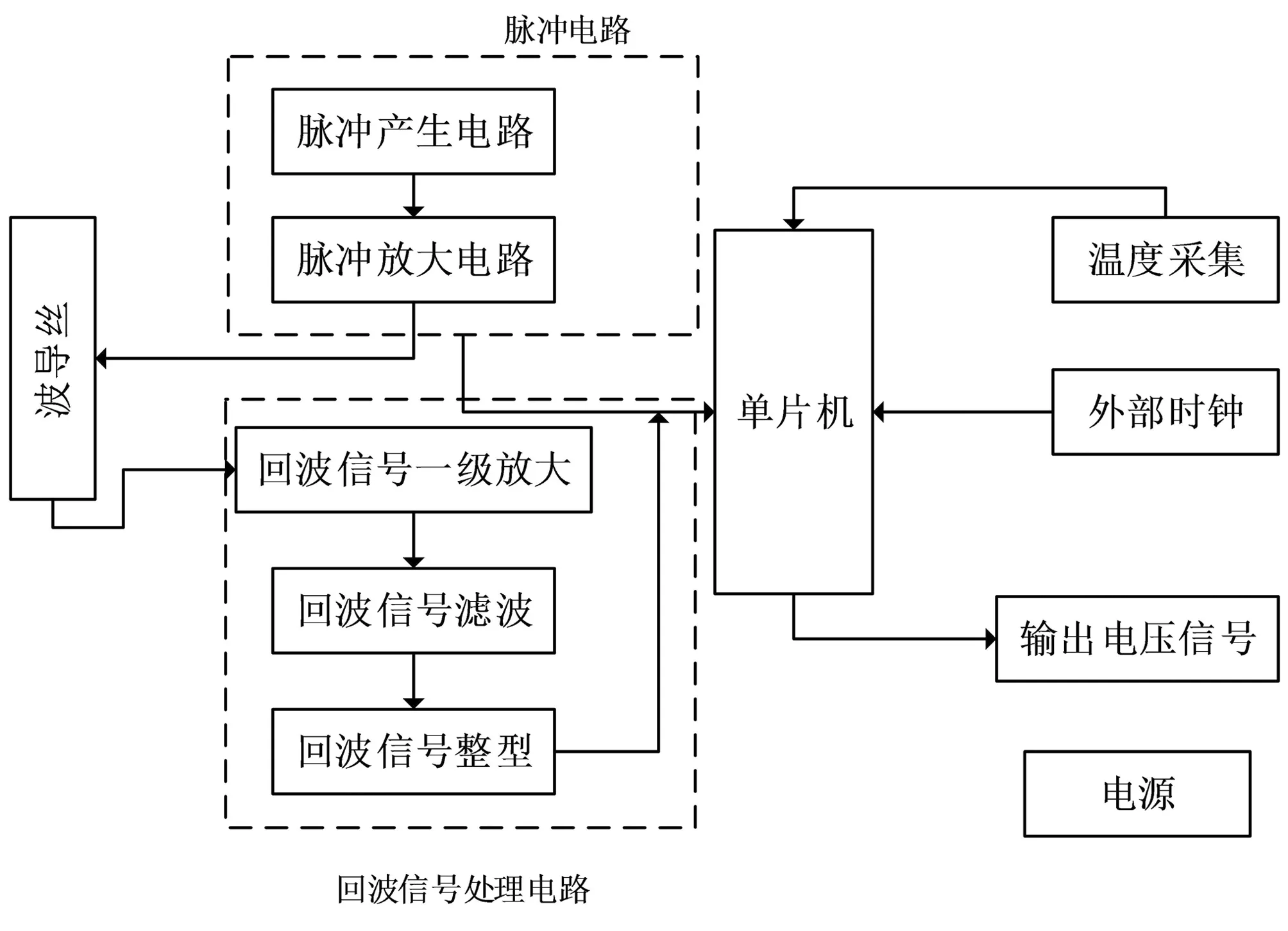
图1 传感器系统结构图
具体测量原理为:在磁致伸缩水位仪波导丝的一端施加一个激励脉冲,脉冲沿波导丝向前传播时,有一个环形磁场伴随着激励脉冲以光速向前传播。当环形磁场遇到浮子中的永磁体产生的纵向磁场时,将会使波导丝发生扭转并产生扭转波。该扭转波以恒定的速率沿着波导丝向两端传播,继续向前传播的扭转波被波导丝一端的阻尼元件吸收,向回传播的扭转波会传到接受带材上。根据磁致伸缩逆效应,缠绕带材的接受线圈中的磁通量会发生变化,从而接受线圈中会产生感应电动势。通过调理电路滤波放大处理,将产生感应电动势转换为计时器可以识别的电脉冲,计数器通过计算发生激励脉冲和接受脉冲之间的时间差t来计算浮子的位置,从而得到当前被测体的液位。
由于扭转波在波导丝中的速度恒定,计算公式[4]为:
式中:G为剪切模量;ρ为质量密度,所以浮子与信号检测装置之间的距离为:
l=vt
由上式即可算出渠道水位。
2 硬件电路设计
2.1 脉冲激励电路
加在波导丝上的激励电流脉冲的频率应满足[5]:
式中:f为激励脉冲频率;L为磁致伸缩水位仪的有效量程;v为扭转波的传播速度,材料选定后,v为恒定值,约为3 000 m/s。
本文设计的有效量程为1 m,故取频率为1.3 kHz。
电流的脉冲宽度τ在2~6 μs之间[5],回波信号的幅值较大,因此本设计选τ为5 μs。激励脉冲采用Ne555时基集成电路[6]产生,电路图如2所示。
脉冲宽度和频率可以通过调节R1和R2的值来改变。
τ=0.69R2C1
T=0.69 (R1+2R2)C1

图2 Ne555脉冲发生电路
NE555产生的脉冲电流值很小,为了使波导丝产生较强的纵向磁场,和环周磁场共同作用来产生较大的扭转波信号,必须将脉冲电流放大,根据资料得,脉冲电流幅值在0.5~3 A之间比较理想[7]。本设计中采用场效应功率MOSFET器件IRF840,由三极管8050构成一级放大器,驱动IRF840产生大电流,本设计电流为1.3 A,符合要求,IRF840的驱动电路如图3所示。
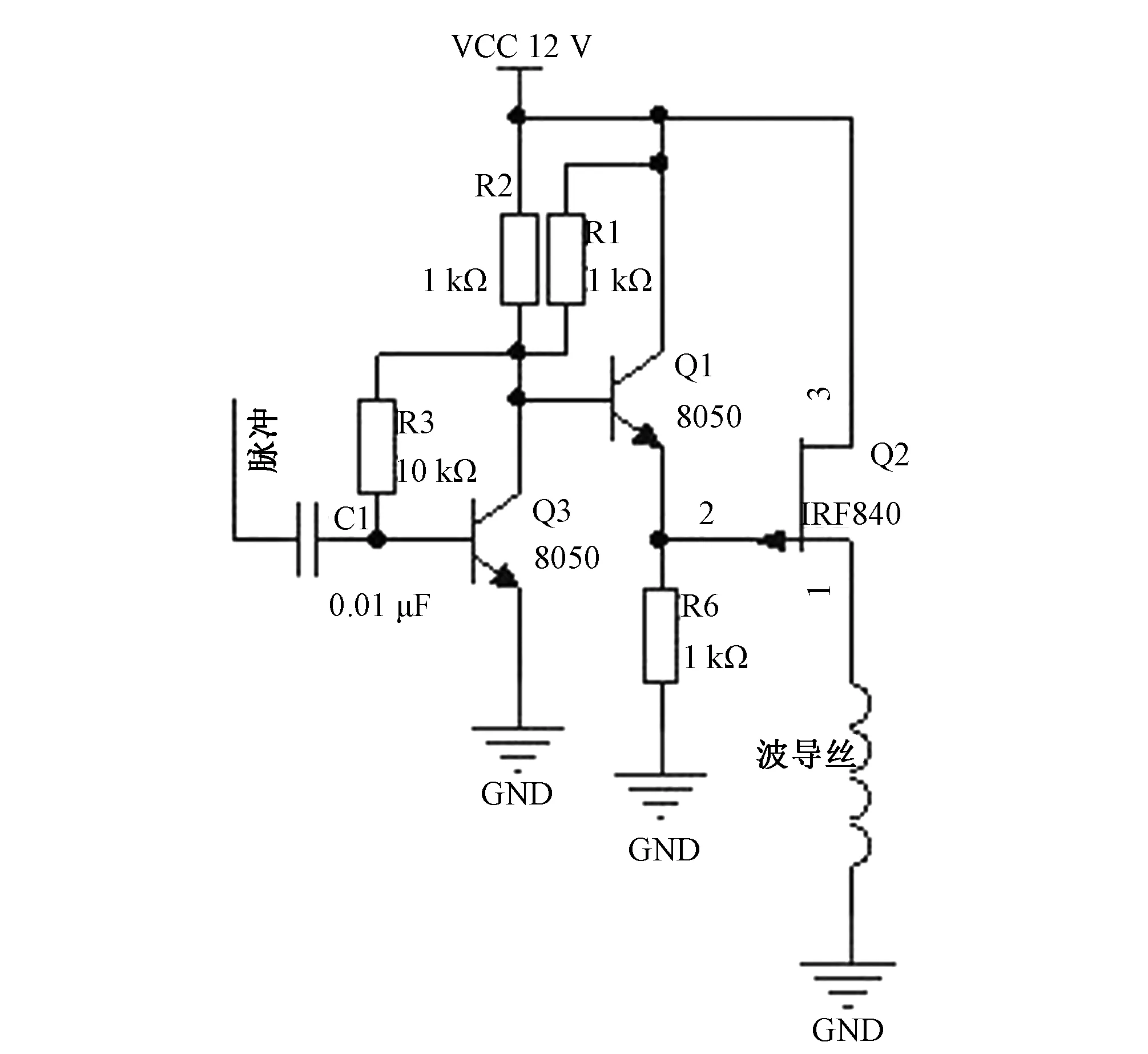
图3 脉冲放大电路
2.2 回波信号处理电路
实验测得回波信号的中心频率约为190 kHz,且产生的信号很微弱,幅值为6 mV左右,并且伴随着很多噪声与干扰信号,不能直接将此信号送入计时电处理,必须将回波信号进行放大滤波整形。本设计先将接收的回波信号经过简单的无源滤波器处理,再用放大器和有源滤波器处理,最后经过电压比较器,将信号整形输出。
2.2.1 一级放大
由于回波信号十分微弱,所以要求放大器的增益要大,且具有良好的放大特性[8]。本设计选用仪表运算放大器AD8420,优化后的放大信号电路如图4所示 。
AD8420的传递函数为:
Vout=G(Vin+-Vin-)+Vref
其中:G为放大器的增益,G只与R1和R2阻值相关:
为了获得高的增益和减小电路板的面积,设计中只采用一级放大,其中R2阻值为900 kΩ, 阻值为1 kΩ,算得增益G为901。经过此电路放大后的信号幅值约为5 V。
2.2.2 带通滤波器设计
经过简单滤波器和放大处理后的回波信号,还存在着很大的噪声和干扰成分[9],在进行计时之前,必须使用滤波器去除杂波信号。所以本设计采用有源滤波器。
本设计采用集成有源滤波器LTC1562-2,设计回波信号的滤波器。LTC1562-2包含4个二阶滤波器,最高可以构成一个八阶滤波器,在单电源供电时信噪比可达93dB。本设计将LTC1562-2的4个二阶滤波器串联,构成一个八阶巴特沃斯带通滤波器,这样使得在阻带内的波衰减的更快,使输出的波形更有效。电路设计图如图5所示。

图5 LTC1562-2组成的八阶巴特沃斯滤波器
回波信号的中心频率为190 kHz左右,根据LTC1562-2的资料,此时带通滤波器的输入阻抗应选择电容作为输入阻抗,每个滤波器的输出信号从V2端输出。每个二阶滤波器的中心频率和品质因数都可以通过以下公式编程得到:
由以上公式计算得,当f0=190 kHz时,R2=10.5 kΩ,取品质因数Q=2.5,得RQ=22.9 kΩ。根据算出的理想电阻值,选定每个二阶滤波器的R2和RQ的实际值。
经过滤波后的信号波形没有波纹浮动,为以后数字处理提供了基础。
2.2.3 比较整形电路
为了便于后面单片机接收处理回波信号,需将该信号处理成方波信号[11],才能利用单片机的外部中断来检测该信号的输入与否。本设计采用摩托罗拉的电压比较器LM397,检测回波信号的第一个上升沿,将有效的信号转变为可被数字电路识别的信号。LM397比较器具有响应时间短的特点,经过LM397后输出信号为OUT3,接入单片机I/O口。
2.3 时间测量数模转换电路
根据磁致伸缩水位仪测量原理可知,只要测出激励脉冲发射的时间T1和检测到回波信号的时间T2,算出两者时间间隔T,即可得到活动浮子到信号发生部位的距离[8]。脉冲信号和回波信号接收示意图如图6所示。
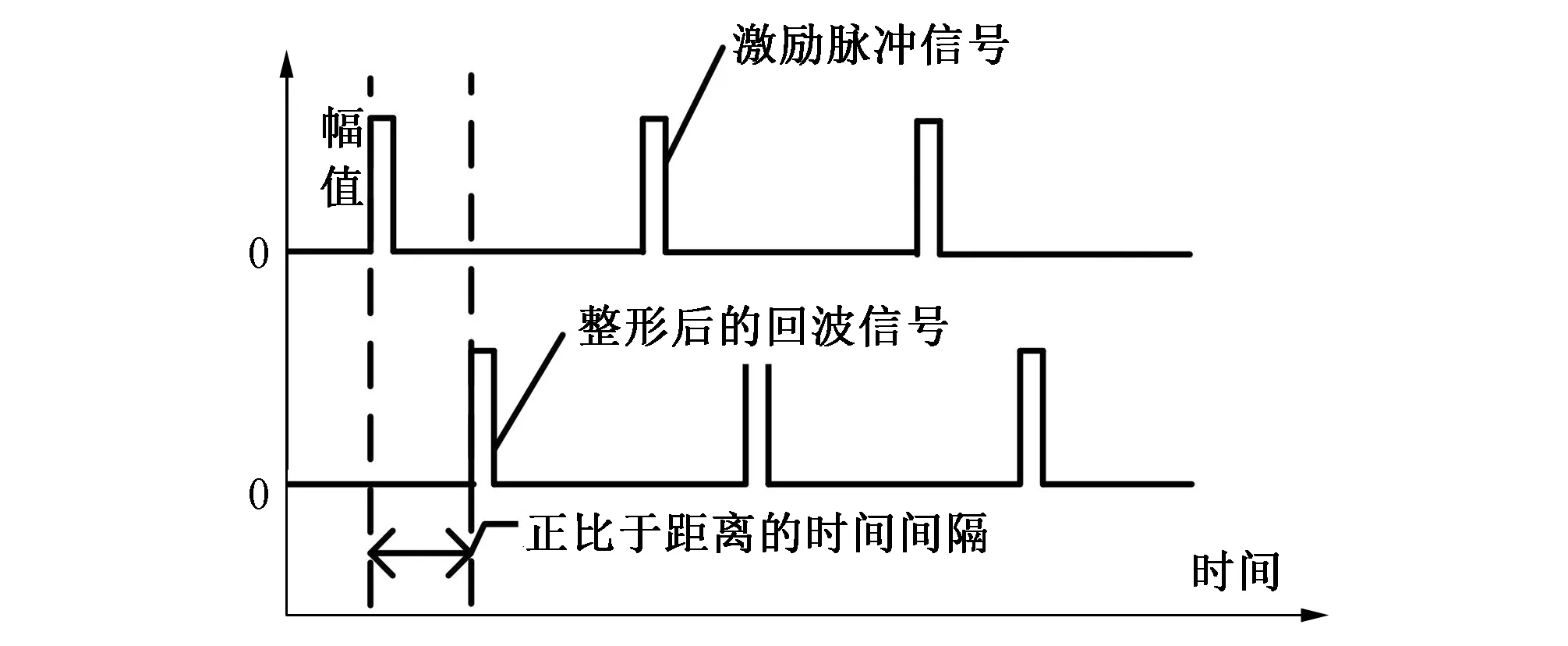
图6 激励脉冲与回波信号接收示意图
本设计时间间隔的测量采用MSP430F169单片机测量。水位仪的精度和时间测量频率成正比关系,选择的时间测量频率高,水位仪的精度相应的就高。MSP430F169的定时器有三种时钟源可以选择[8],本设计选择外部8 MHz时钟源作为计数脉冲频率,脉冲周期为0.125 μs,选择MSP430F169的定时器A作为计数器,计数器A是16位计数器,最大计值为65535,如果计满,最大可以测得有效量程为24.57 m,完全满足本设计要求。由于本设计选用的Fe-Ni波导丝扭转波的传播速度为3 000 m/s左右,故可得测量的精度为300 μm,对于灌区明渠水位的测量来说,精度完全可以满足。
为使水位计可以方便地输出正比与量程的0~5 V电压信号,本设计利用MSP430F169内部的数模转换模块DAC12,将其通过内部寄存器配置为12位DAC,即分辨率为0.024%,通过单片机内部编程输出模拟电压信号。产生的脉冲信号pluse由单片机P2.1引脚输入,计数器开始计数,回波信号由P2.2引脚输入,当检测到回波信号上升沿时,停止计数。单片机编程算得相应距离后转换成对应电压信号由DAC0OUT引脚输出MoNi信号。具体电路图7所示。
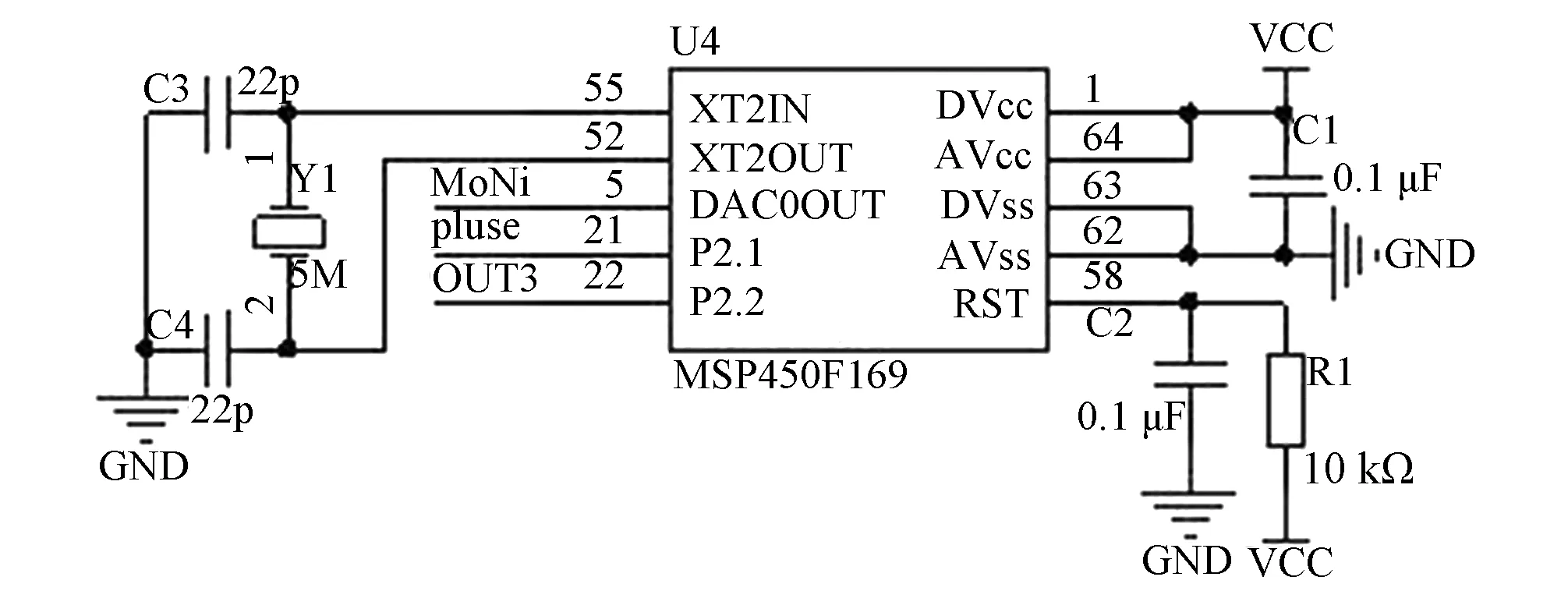
图7 MSP430F169电路图
3 传感器性能测试
为了测试本文设计的灌区明渠水位传感器的线性度,将传感器固定在渠道的中央位置,传感器的零点位置与渠道水位零点平齐,该传感器的有效量程为1 m,实验水位从0 m开始,每隔10 cm记录一次传感器的输出电压值,由测得的数据绘制线性度曲线如图8。

图8 线性度图
由公式下面公式计算传感器的线性度[13]:
式中:(ΔyL)max为测量中的最大误差;yFs为满量程输出水位值。
从图8中可以明显地看出该传感器测得的水位和实验中人工测得的水位拟合度较好,线性度较高。
4 结 论
本文以MSP430F169 单片机为控制中心,应用磁致伸缩效应,设计了高精度的适合灌区明渠水位测量的仪器,本设计对仪器的各个电路进行了优化,特别根据灌区明渠水位的测量,对该水位仪头部的激励脉冲产生与放大电路、检测到的回波放大处理电路、回波信号噪声与干扰信号的滤波电路、时间计时与数模转等电路做了合理的优化设计。根据水位计所需要的量程,设计了适合量程的脉冲频率和脉冲宽度,选用仪表放大器和集成可编程有源数字滤波芯片处理微弱、包含噪声的有用信号,考虑到灌区明渠水位的测量达到300um就已经远远达到了测量要求的情况,选用TI公司的MSP430F169单片机完成时间间隔的测量和数模转换,这样降低了仪器的成本,大大减小了仪器头部位置的体积。经在实验室条件下测试表明,本文所设计的基于磁致伸缩效应的明渠水位测定仪在性能和精度上都满足了灌区明渠水位测量的要求,在应用范围和技术研究方面都有着广阔的前景,为灌区用水精量化、自动化提供了基础。
□
[1] 俞双恩,左晓霞,赵 伟. 我国灌区量水现状及发展趋势[J]. 节水灌溉,2004,(4):35-37.
[2] 冯红亮,杨志红,扈晓斌. 磁致伸缩效应原理及在工业测量中的应用[J]. 仪表技术与传感器,2009,(S1):344-346,371.
[3] 侯淑萍,杨庆新,陈海燕,等. 超磁致伸缩材料的特性及其应用[J]. 兵器材料科学与工程,2008,(5):95-98.
[4] 杨宗旺,周新志. 磁致伸缩位移测量的研究与回波信号的分析与处理[J]. 仪表技术与传感器,2012,(11):177-180.
[5] 王博文,张露予,王 鹏,等. 磁致伸缩位移传感器检测信号分析[J]. 光学精密工程,2016,(2):358-364.
[6] 姜殿武,赵玉山. 用555时基电路制作脉冲宽度、频率可调的脉冲发生器[J]. 自动化与仪器仪表,1996,(1):41,50.
[7] 冯 建,赵 辉,刘伟文,等. 磁致伸缩位移传感器电路系统的设计[J]. 电子测量技术,2010,(1):11-13,28.
[8] 李丛珊,姜印平. 一种磁致伸缩位移传感器的优化设计方 法[J]. 传感技术学报,2014,(9):1 202-1 207.
[9] 江小霞,钟荣龙,卢长耿. 磁致伸缩位移传感器的应用[J]. 传感器技术,2003,(1):50-52.
[10] 李 红,罗 裕,韩邦成,等. 带通滤波器法电压积分型定子磁链观测器[J]. 电机与控制学报,2013,(9):8-16.
[11] 陈淑芳. 一种高精度数据采集系统模拟信号调理电路的设计[J]. 长沙铁道学院学报(社会科学版),2008,(1):215-217.
[12] 沈建华,杨艳琴. MSP430 系列16 位超低功耗单片机原理与实践[M].北京: 北京航空航天大学出版社,2008.
[13] 张德福,葛 川,李显凌,等. 高精度位移传感器线性度标定方法研究[J]. 仪器仪表学报,2015,3605:982-988.
