一种动态滤波装置的设计
2017-03-22李阳

摘 要设计一套动态滤波装置, 采用步进电机传动,脉冲频率控制转速,脉冲个数控制转角技术,并对该装置进行实际实验,实验结果表明,该装置简单易行,运行平稳,可与摄像系统配合完成滤光实验,滤光质量良好。
【关键词】滤波装置 成像 步进电机
摄像机拍摄的图像是由被拍摄物发射光(反射光)及背景光两部分组成。在摄像机已经确定下来的情况下,一般采用通过改变曝光参数的方法,调整目标成像的亮度来改善目标的成像质量。但是在实际使用中,受被拍摄物体的亮度、运动方式、背景环境等多种因素影响,摄像机的曝光参数的调节有时比较困难,特别是物体本身亮度较强的情况下,参与成像的主要光谱对应的光强太大,使得摄像机接收CCD饱和,而目标轮廓对应的成像光谱光强较弱,所以轮廓不清晰。只靠摄像机自身降低曝光参数来进行目标的清晰成像并不是那么容易,因此,仅仅依靠调整曝光参数是无法从根本上解决成像质量清晰与否的问题,需要设计一套载有不同波段滤光片的滤波转动装置,采用步进电机驱动的转盘来装夹滤光片,滤波装置与摄影机时序匹配。本文中设计的滤波载盘旋转时,不拍摄;电机停转时,摄影机工作。滤波转动装置通过选择适当的高通、低通或带通滤波片,将干扰目标成像的光谱成分滤除,使目标在图像中的对比度得到改善。
1 滤波装置的组成
滤波装置是将装载不同波长性能滤光片的转轮置于摄影或摄像机之前,在摄影、摄像机工作时,控制转轮,使不同波长的光成像,比较成像的质量,决定滤光波长。
本套装置选用常规摄像机,考虑到目标距离摄影点很远,使用伽利略系统,目镜放大倍数为10倍,焦距为25mm,物镜焦距为900mm,总角放大倍数为36倍,有连拍功能。滤波装置由机械载片转盘、步进电机驱动器、控制电路以及显示设备组成。
主要完成以下功能:
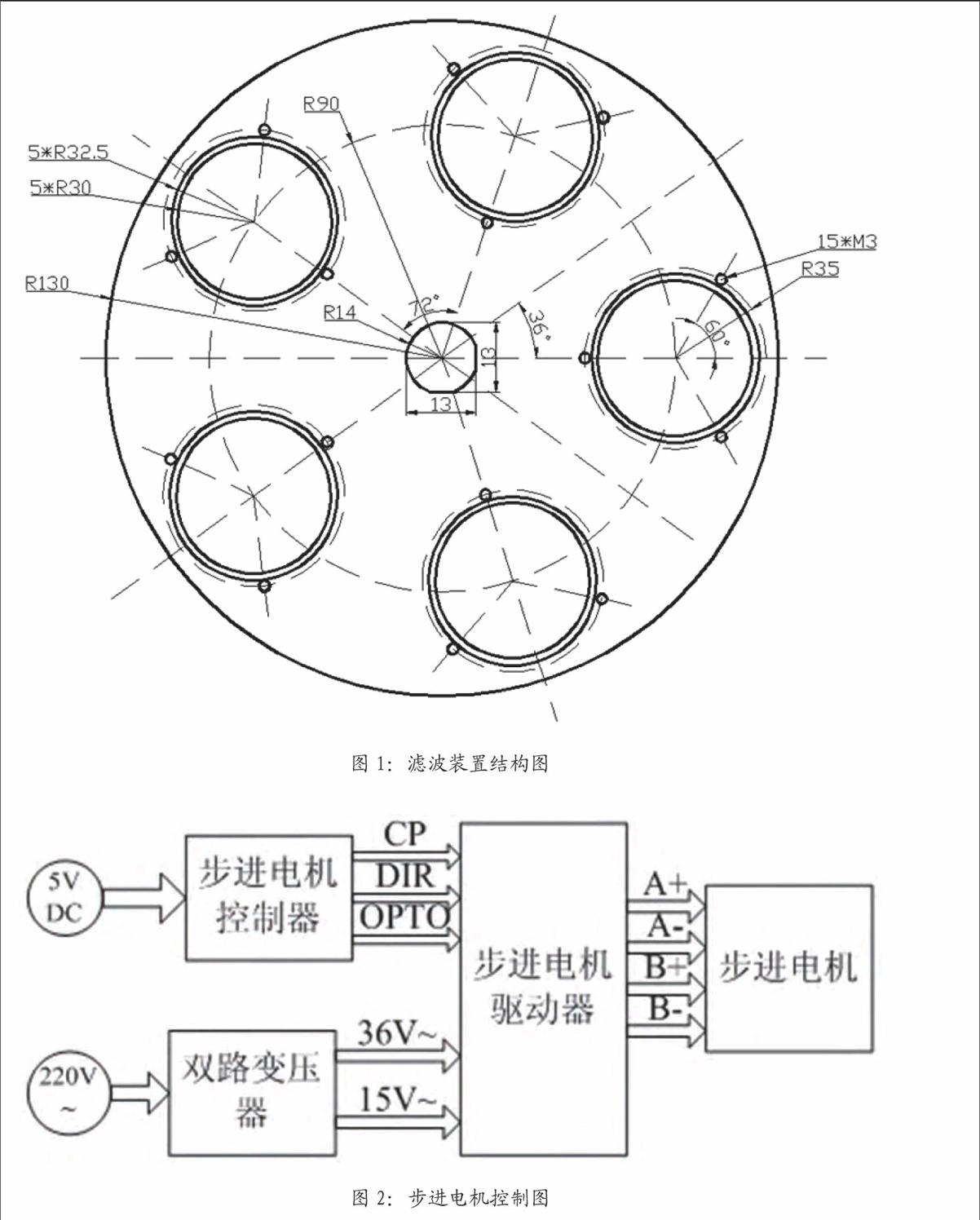
(1)控制電机能够带动转盘在0.5s内转动72°。
(2)完成转动后滞留一段时间,继续下一步,滞留时间以0.1s为单位可调。
(3)运行速度、加速度可调,转动角度以0.9°为单位可调。
(4)具有显示功能,显示参数设置信息以及电机运行信息。
(5)具备串口功能,可以方便进行程序烧写,并可与上位机交互通信及控制。
2 步进电机驱动控制装置
2.1 步进电机选型
摄像机带动转盘转动,对电机要求较高,不仅启动速度要快,而且停止后定位要准确,但在设计时发现转盘的转动惯量较大,不易停止下来。通过实验发现,采用永磁式步进电机可以满足本装置中对电机的要求:电机既可满足带动转盘高速运动的同时,又可满足在停止时转盘定位准确无过冲现象,同时功率消耗较小。
步进电机型号定为:85BYGH-201。
2.2 控制电路设计
步进电机控制方框图如图2所示。
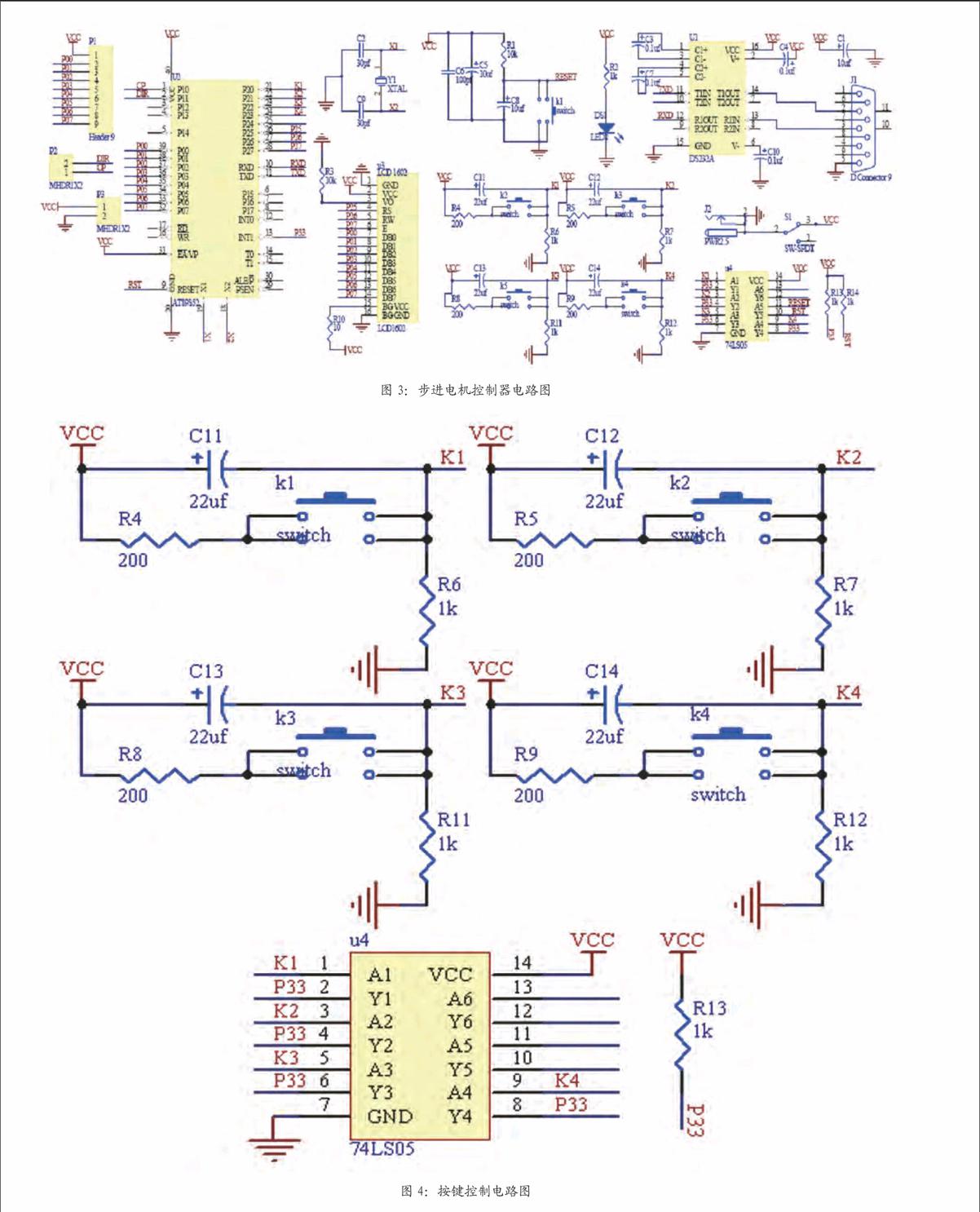
为了保证本装置结构简单、运行可靠,经过论证,步进电机控制器采用STC89C52单片机芯片,能够满足本装置使用要求。该系统能够发出脉宽、频率、脉冲个数均可控制的方波,控制电机运行,并且还可以利用串口对单片机进行程序的烧写,对其功能可以进一步扩展。其整体的电路图如图3所示。
采用SMC1602A液晶显示器,能够将滤波装置的参数设置及工作状态实时显示出来,供操作人员实时监控。操作人员可以通过操作液晶显示器面板的控制按键,实现装置控制参数的显示、设置、电机运行和停止等功能。如图4所示是按键控制电路图。
2.3 软件设计
单片机采用多中断系统,分析判断中断标志位,确定有无中断以及中断方式,确定中断方式后再通过查询方式判断具体工作模式,最后执行相对应程序。软件控制流程如图5所示。
3 实验分析
采用普通摄像机加装本滤波装置,滤波片滤光范围在300nm至1200nm之间,对150米以外的物体做光谱采集,不漏掉目标,干扰光不进入系统,电机带动转盘按照预设程序,与摄像系统配合,依次拍下目标光谱信息。本滤波装置正确地在外场采集了目标光谱。如图6为拍摄照片滤波对比效果图。
综上实验结果,从图中可以看出,滤波装置正常工作,滤波效果达到预期目标。
4 结束语
本套滤波装置采用步进电机传动,脉冲频率控制转速,脉冲个数控制转角,使曝光与传动匹配。结构简单易行,用常规摄影摄像仪器、滤光片,经过光谱滤波后改进像质效果很明显,得到较好的像质。
参考文献
[1]崔星.机电混合驱动系统特性与参数匹配研究[D].北京:北京理工大学机械与车辆学院,2009.
[2]姚荣斌,孙红兵.基于STC89C51RC的转速测量系统设计[D].连云港师范高等专科学校学报,2007(04):84 -87.
[3]刘保延等.步进电机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,1997.
[4]冯晓,刘仲恕.电机与电器控制[M].北京:机械出版社,2005.
[5]王诣,尤丽华.基于AT89S51单片机的步进电机控制系统的研究[D].无锡:江南大学机械工程学学术论文,2005.
作者简介
李阳(1977-)男,辽宁省葫芦岛市人。工程师,从事光学测量工作。
作者单位
92941部队91分队 辽宁省葫芦岛市 125000
