基于物联网的远程智能灌溉控制系统的开发
2017-03-21李德旺许春雨宋建成田慕琴邢希君
李德旺,许春雨,宋建成,田慕琴,邢希君
(太原理工大学,煤矿电气设备与智能控制山西省重点实验室, 矿用智能电器技术国家地方联合工程实验室,太原030024)
0 引 言
农田灌溉是农业种植与生产过程中的关键环节,对提高作物产量起着决定性的作用。国家统计局数据显示[1],2015年,农田灌溉用水占总用水量的比例约为63.11%,其发展态势为农业用水的比重逐渐降低,并且我国主要灌区灌溉水有效利用系数约为0.4,农业水资源短缺与粗放低效利用并存的状况,进一步加剧了农业水资源短缺程度。我国在农业灌溉方面,还存在一些问题:①仍以传统生产经验为主,缺乏精确调控手段,农田灌溉精度难以保证,造成水资源浪费严重;②灌溉技术落后,监测与控制都采用人工管理,缺乏技术创新,存在劳动强度大、人机交互能力差等弊端,严重影响农作物品质和产量。因此,依靠人工智能算法合理计算灌水定额的高效、智能灌溉技术成为解决水资源不足,缓解农业用水供需矛盾的有效途径。
目前,美国利用“3S”技术获取、传送、处理各类农业信息[2],据其确定农田土壤水分变化和适宜的灌水区与灌水量,科学指导农业灌溉。我国“十三五”发展规划[3]明确指出,要大力推进“互联网+”现代农业建设步伐,应用智能控制、物联网等现代信息技术,建立互联共享的信息平台,重点突破农机装备、智能农业等领域关键技术,实现农业智能化监测和管理。本文针对传统农业向现代农业转型时期出现的问题,在前人研究的基础上[4-5],设计并实现了以物联网技术为核心的远程智能化灌溉控制系统。该系统可远程监测农田环境信息,并根据模糊控制算法实现适时适量的灌溉,保证农作物在各生长阶段都处于最佳的生长状态,实现灌溉过程的智能化、网络化。
1 智能灌溉系统架构
设施农业远程智能化灌溉控制系统采用物联网的三层网络架构设计[6]:感知层、网络层和应用层。系统整体框架如图1所示。

图1 系统整体框架Fig.1 The architecture diagram of overall system
感知层是设施农业物联网的底层,具有全面感知的核心能力,为智能化灌溉系统提供最原始的数据信息。本系统依据无线传感节点的低功耗、低成本及操作性灵活的设计原则,采用微型ZigBee智能化传感节点结合土壤湿度传感器获取农田土壤湿度信息,为精准灌溉提供科学、全面的依据。
网络层是以局域网、广域网、互联网为基础建立起来的无线数据传输通道,网络层主要承担着数据传输的功能,可将感知层采集到的环境信息无障碍、高可靠性地传输到应用层进行处理,亦可将应用层的灌溉决策送到感知层,控制执行机构动作。该无线数据传输通道避免了农田、果林等大面积栽培种植区域网络布线带来的各种问题。
应用层的主要功能是合理、高效地处理网络层传来的海量农田环境参数,利用模糊控制算法智能处理土壤湿度信息,做出正确的灌溉决策,控制水泵、电磁阀的有效动作,解决了信息处理和人机界面的问题,实现智能化灌溉管理。
2 系统的网络设计
2.1 无线传感网络技术
无线传感网络(Wireless Sensor Network)技术在智能灌溉中的应用是将智能传感器单元按照一定的布局安装在灌溉农田内,然后通过无线通信方式实时监测、感知和采集网络覆盖区域内环境和监测对象的信息[7],再发送到信息采集站或灌溉系统集控中心,避免了灌溉现场布线带来的各种问题。
WSN主要由传感节点(终端)、路由节点(路由器)、协调节点(协调器)组成,分别负责灌溉区域内的信息采集和数据转换、控制信息的传输、传感器网络的配置和管理。WSN具有容量大、功耗低、可靠性强等优点,可应用于较大规模的作物生产基地,促进了智能农业和精准农业的发展。
2.2 无线传感网络的设计
本系统以局域网、广域网、互联网为基础,建立了获取农田环境信息的无线传感网络,网络的拓扑结构如图2所示。

图2 无线传感网络的拓扑结构Fig.2 The topology of WSN
传感器节点采用支持IEEE802.15.4协议、工作在2.4 GHz频段、传输速率为250 Kbps的ZigBee技术,是一种功耗低、网络容量大、可靠性强的双向无线通讯技术。型号为RS-WS-NO1-TR的土壤湿度传感器与ZigBee无线模块通过RS485总线方式通信。多个ZigBee网络节点组合成一个具有自组织、自愈能力的网状网络,将获取到的农田信息以多跳的方式传输到网关。网关是局域网转广域网的媒介,能够完成ZigBee协议转GPRS、GPRS连接Internet的任务,实现无线近距离传输向无线远程传输的转变,扩展通信距离,突破了地域限制。
远程监测中心主要接收现场数据,将数据显示、存储,方便用户进行历史查询,并且可设定现阶段农作物生长的最佳湿度,保证农作物在各生长阶段都处于最佳的生长状态。
3 智能控制策略
3.1 模糊控制理论
模糊控制(Fuzzy Control)在智能灌溉中的应用是把基于丰富的种植经验总结出来的、用自然语言表述灌溉策略,或通过大量实际灌溉数据总结出来的控制规则,用计算机予以实现的智能化灌溉控制[8]。它与传统控制方法的最大不同,在于不必研究被控对象的内部结构、工作机理或数学模型。

图3 模糊控制器的结构框图Fig.3 The block diagram of fuzzy controller
土壤是一个惯性、非线性系统,且作物全生育期包含多环境因子,很难建立精确统一的数学模型,将模糊控制技术引入对土壤湿度信息的分析与处理,可提高灌溉决策的准确性。常用的模糊控制器结构框图如图3所示。土壤湿度作为作物生长的重要环境变量,在农田灌溉中,通常把土壤湿度差值和差值变化率分别作为模糊控制器的输入信号,经过模糊化(D/F)变换成模糊量,送入含有模糊规则的模糊推理模块(R),经过近似推理得出结论—模糊集合,然后被清晰化模块(F/D)变换成清晰量,再输出到下一级去调节被控对象,达到预期控制效果,完成灌溉系统模糊控制。
3.2 模糊控制器的设计
土壤湿度信息的智能处理,是实现智能化灌溉的关键环节。设计模糊控制系统的核心是设计模糊控制器,本设计采用二输入单输出的Mamdani型模糊控制器,采用三角形与高斯型相结合的隶属函数,输入为土壤湿度差值和差值变化率,输出为电磁阀开启时间U。农作物生长的最佳湿度记为R,实测土壤湿度记为Y,土壤湿度差值为E=R-Y,差值变化率为EC=dE/dt。
土壤湿度差值E和土壤湿度差值变化率EC的物理论域分别为[-15,15]和[-3%,3%],语言变量论域内模糊子集均为{NB,NM,NS,ZE,PS,PM,PB}。模糊论域为{-4,-3,-2,-1,0,1,2,3,4}。电磁阀开启时间U的物理论域为[0,10],模糊子集为{ZE、PS、PM、PB},模糊论域为{0,1,2,3,4}。输入量、输出量的隶属函数赋值表如表1~2所示。生成模糊控制规则是设计模糊控制器中最为核心的工作[9]。本研究中模糊控制规则的设计原则:根据实时获取的土壤湿度与预先设置的作物生长最佳湿度的差值,动态调整电磁阀的启停,保证农作物在各生长阶段都处于最佳的生长状态。表3为输出量U的模糊控制规则。

表1 输入量E/EC的隶属函数赋值表
3.3 模糊控制器的仿真
模糊控制器设计完毕后,对模糊控制器的调试是非常重要的工作。在MATLAB中,模糊推理系统的GUI是进行模糊系统仿真的重要工具。在模糊推理系统编辑器(FIS Editor)、隶属函数编辑器(Membership Function Editor)以及模糊规则编辑器(Rule Editor)3个编辑器中,可以完成模糊推理系统的结构编辑、模糊子集的隶属函数及其分布的选定、模糊规则的建立等主要设计任务,以及控制效果的仿真观测和设计参数的调试。图4是通过输出曲面观测窗查看输入、输出的关系。由曲面图可以看出,输出量U是两个输入量E和EC的非线性函数U=F(E,EC),图中光滑、平缓的输出特性曲面是模糊控制器性能优良的基础。

表2 输出量U的隶属函数赋值表
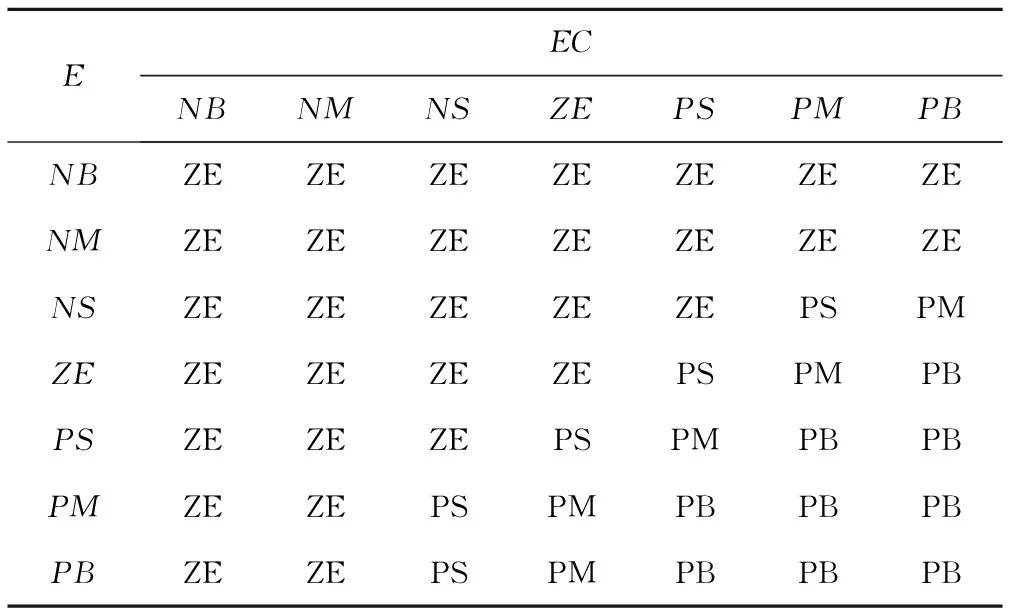
表3 模糊控制规则表

图4 输出特性曲面图Fig.4 Output characteristic surface
同时,采用Simulink中的Fuzzy Logic Toolbox对整个模糊灌溉控制系统进行建模和仿真分析。将土壤最佳湿度设置为65%,土壤湿度仿真曲线如图5所示。

图5 土壤湿度仿真曲线Fig.5 Soil humidity simulation curve
由仿真结果可以看出,模糊控制器响应快、无振荡、系统平稳性好,仿真得到的土壤湿度与设定的最佳湿度误差约为2.5%,符合灌溉精度要求。
4 软件设计
4.1 PLC程序设计
西门子PLC作为现场控制器,与GPRS模块通过RS485总线通信,远程接收集控计算机指令,驱动水泵、电磁阀执行有效的动作。该系统的PLC程序功能上主要包括数据初始化、控制模式切换(包括智能控制模式和手动控制模式)、环境参数控制、选择最佳湿度范围以及远程通信,还可接收实时环境参数,避免上位机数据处理造成时间上的延迟误差,形成闭环反馈控制[10],提高灌溉精度。
选择当前最佳湿度程序就是根据集控中心下达的指令满足作物在不同生长阶段对土壤湿度的需求。智能化灌溉控制系统采用智能控制与手动控制相结合的控制方法,可根据集控计算机或现场控制柜进行选择。智能灌溉控制模式就是采用模糊控制算法根据当前土壤湿度,准确计算灌水时间,满足灌溉需求。手动控制模式则是PLC根据I/O输入手动操作灌溉系统,进行灌溉。无线模块亦可读取PLC寄存器的值,将灌溉时间、水泵及电磁阀的动作情况上传到集控计算机显示、存储。
4.2 集控中心软件设计
该系统采用亚控科技公司的Kingview6.55软件为开发平台,结合农业生产实际设计了一套系统集中监控界面。集控中心界面主要由系统管理单元、数据显示单元、数据存储单元、最佳湿度选择单元、运行模式选择单元、报警单元等组成,其主要功能为:
(1)系统管理单元。主要针对不同的用户设置管理权限,分别具有完善和细致的功能,增强了智能灌溉系统的安全性。
(2)数据显示单元。将采集到的不同区域的农田环境参数以文本和曲线的形式显示,管理人员能够直观的了解农田现场状况。
(3)数据存储单元。农田环境参数数据量大,保证这些现场数据可靠存储是实现智能灌溉的基础[11]。数据库对不同数据分类存储,亦可根据查询、检索以及历史曲线图的方式直观显示。
(4)最佳湿度选择单元。操作者根据农作物当前生长阶段设定最佳土壤湿度,系统自动根据模糊控制算法形成最优灌溉方案。
(5)WEB界面发布。方便用户在没有安装Kingview 6.55的远程客户端查看农业现场状态,提高了数据共享性。
(6)安全报警。集控界面设置安全报警单元,增加了对系统故障的监测和识别能力,提高了系统的可靠性。
5 系统性能测试
系统性能测试是检测系统是否满足设计要求的关键步骤,测试项目主要包括数据采集测试和智能化灌溉测试。
5.1 数据采集测试
传感器数据采集精度是直接影响智能化灌溉的直接因素,所以有必要对传感器采集结果、ZigBee节点与GPRS通信可靠性、GPRS与应用层数据传输稳定性进行测试,保证环境参数在农业现场不会因为传感器精度、无线网络数据传输等问题导致错误的灌溉决策。测试方案是将10个传感器节点以六边形规则化节点部署方法置于灌溉试验区,形成无线传感网络,实现土壤湿度采集,再将采集到的数据通过GPRS远程发送到集控中心。试验区土壤湿度实时刷新,随机选取某时刻的测试值,与实际值比较,试验数据如表4所示。
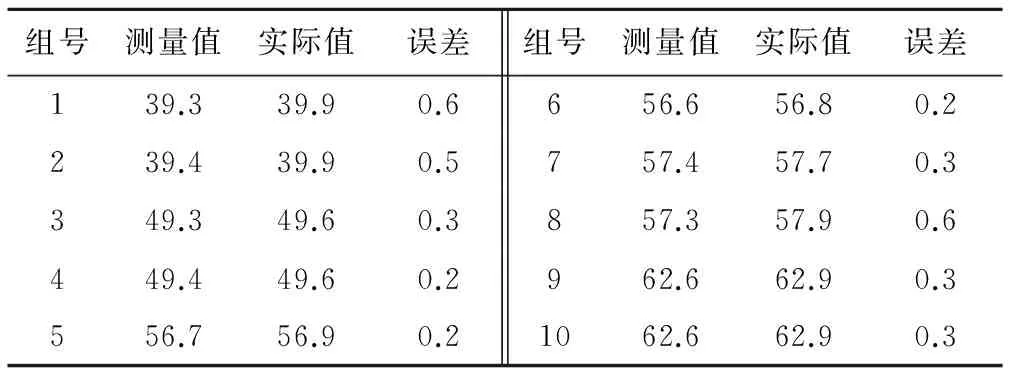
表4 土壤湿度试验数据 %
试验结果表明,ZigBee节点可以准确地将传感器采集到的农田环境信息通过GPRS传到监测中心,误差均未超过1%,传感器采集结果准确,网络传输可靠,满足系统的性能指标和技术要求。
5.2 智能灌溉测试
模糊控制算法是智能灌溉系统的“神经中枢”,其控制效果如何,必须通过系统运行试验进行测试。集控计算机机将最佳土壤湿度设置为65%,系统根据模糊控制算法自动形成最优灌溉方案,做出灌溉决策,PLC作为现场控制器控制水泵和电磁阀动作,土壤湿度响应曲线如图6所示。

图6 土壤湿度响应曲线Fig.6 Soil humidity response curve
试验结果表明,集控中心的各项管理功能正常,系统可在无人值守的情况下,根据实时土壤湿度做出最优灌溉决策,使土壤湿度保持在设定值附近,提高了灌溉水利用系数,减少了农田用水量,实现了远程智能化灌溉的设计要求。
6 结 语
本文针对农田灌溉技术水平落后、缺乏技术创新,导致灌溉精度差、水资源浪费严重等问题,通过多种技术的融合,进行了农田灌溉智能控制与管理技术的研究,得出如下主要结论。
(1)构建了设施农业物联网三层架构,集信息采集、传输、灌溉应用为一体,实现种植区域统一管理。
(2)设计了无线局域网ZigBee与无线广域网GPRS多网络融合通讯模式,搭建底层无线传感网络,实现了农田环境信息无线近距离采集与远程传输。
(3)采用模糊控制算法实现了智能化灌溉,系统可在无人干预的情况下自主根据作物需水量驱动设备完成精准灌溉,以最低限度的灌水量保证作物处于最佳生长状态,满足作物成长营养需求,可大幅提高农产品产量和质量。
(4)利用Kingview 6.55搭建了上位机平台,并结合WEB网络发布,提高了数据的实时共享性,实现了作物种植的远程监控。
[1] 中国灌溉排水发展中心.全国“十三五”高效节水灌溉规划思路报告[R].北京: 中国灌溉排水发展中心,2015.
[2] 金宏智,严海军,钱一超. 国外节水灌溉工程技术发展分析[J].农业机械学报,2010,(9):60-62.
[3] 新华网. 中华人民共和国国民经济和社会发展第十三个五年规划纲要[R]. 2016.
[4] 李聪聪,高立艾,李云亮.基于物联网技术和模糊控制的智能节水灌溉系统[J].节水灌溉,2013,(12):83-86.
[5] 高立艾,刘少博,李丽华.基于物联网技术的温室土壤环境监测系统的设计[J].节水灌溉,2012,(10): 72-74.
[6] 王志良,刘 欣,刘 磊.物联网控制基础[M].西安:西安电子科技大学出版社,2014.
[7] G. Nisha, J. Megala. “Wireless Sensor Network Based Automated Irrigation and Crop Field Monitoring System”[C]∥ International Conference on Advanced Computing (ICoAC), 2014.
[8] 赵伶俐.基于物联网的智能节水灌溉系统的研究[J].节水灌溉,2015,(8): 84-86.
[9] WaelChakchouk, Abderrahmen ZAAFOURI. “Hybrid Control of a Station of Irrigation by Sprinkling: fuzzy supervisor approach”[C]∥ International Conference on Systems and Control, Sousse, Tunisial, Aprial. 2015:28-30.
[10] 刘 义,王 熙.PLC与变频器在滴灌系统中的应用[J].农机化研究,2013,(9):209-212.
[11] 张伶鳦,王润涛,张长利,等.基于调亏理论和模糊控制的寒地水稻智能灌溉策略[J].农业工程学报,2016,32(13):52-58.
