基于DCDC变换器的铅酸蓄电池充电控制方法
2017-03-17孟佳,李慧
孟 佳, 李 慧
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
0 引 言
车载蓄电池是汽车重要的辅助设备,但是往往存在过充或过放的问题,进而导致蓄电池寿命缩短。而其中车载铅酸蓄电池通常使用常规的充电方法,这种充电法的耗时较长且存在一定弊端。针对上述问题,文中提出一种基于电池剩余电量(SOC)检测的快速智能充电方法,通过实时对电池电压、电流等参数进行监测,再通过将电池的SOC的估算算法与模糊控制充电相结合,实现当SOC低于某个下限值时进行自动充电;当SOC高于某个上限值时,则停止充电,从根本上保证了电池不被过放电[1-2]。
1 SOC定义
美国先进电池联合会(United States Advanced Battery Consortium)将SOC定义为在特定放电倍率下,电池剩余电量占相同条件下额定容量的百分比[3]:
(1)
式中:QC----电池剩余电量;
QI----以电流I放电一段时间后电池的容量[4]。
从式(1)中可以看出,当SOC=1,代表电池充满电,SOC=0,代表电池理论上完全放电,剩余电量为0;在实际使用过程中,为了尽量延长电池的使用寿命,一般不会对电池进行完全放电,因此实际SOC值也不可能为0。
文中采取电动势法对电池SOC进行估算,选择电动势法的原因主要有两方面:一是铅酸蓄电池的电动势和SOC之间设有某种必然的联系,依靠实时检测电动势的方式可以很好地预测电池SOC;二是电动势法相对于安时计量法等传统算法可降低SOC估算的初值误差和累积误差。
确定了SOC的估算方法后,需要进一步选取合适的电池电路拓扑,常用的电池等效电路拓扑模型如图1所示[5-6]。

图1 蓄电池等效电路
图中,E为电动势,R0为欧姆电阻,R1和R2为极化电阻,C1和C2为极化电容。
分别给电池施加电流和电压激励,通过检测不同激励下的响应数据对图1中电池等效电路模型进行参数辨识。首先对电池进行充电,按照一定的电流倍率,充电一段时间后将电池静置大约1 h,再按照一定的电流倍率进行放电,记录这段时间电池端电压的变化,并且分析充电和放电过程中电压、电流波形和参数的变化,整个参数辨识过程如图2所示[7]。
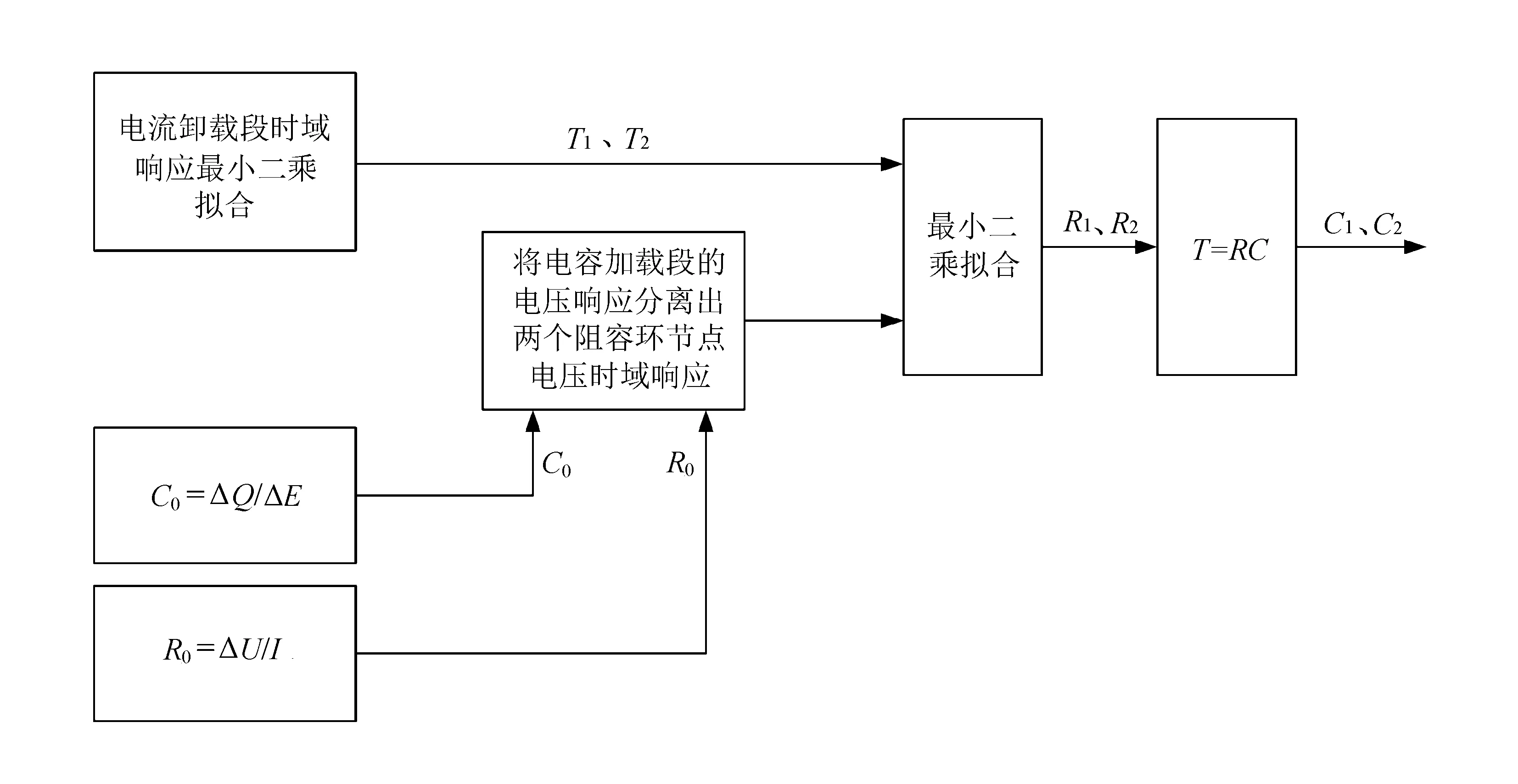
图2 参数辨识过程
在整个参数辨识过程中,由于阻容环节的电压无法突变,因此电压的突变与电阻R0有关,在静置过程中电压的变化主要与两个阻容环节电容的放电有关。
(2)
由于放电过程是在电池完全静置的前提下进行的,因此两个极化电容相当于零状态响应:
(3)
式中:UOC----二阶电路的开路电压;
UC1、UC2----分别是电容C1和C2两端的电压;
T1、T2----两个阻容环节的时间常数,T1=R1C1,T2=R2C2;
I----端电流。
由于电容C0值一般很大,因此在放电过程中,可以认为C0两端电压的变化很小,可以认为随时间线性变化,用f(ΔE,Δt)表示:
u(t)=Uoc-f(ΔE,Δt)-IR0-

(4)
2 智能充电器控制器设计
根据著名的马斯定律可知,蓄电池充电过程中伴随着温升、析气、极化等限制充电速度的系列问题。过高的充电电流并不增长充电率,只增长析气;相反,过低的充电电流则会增加充电时刻。因此快速、高效的充电电流应该满足马斯曲线,如图3所示。
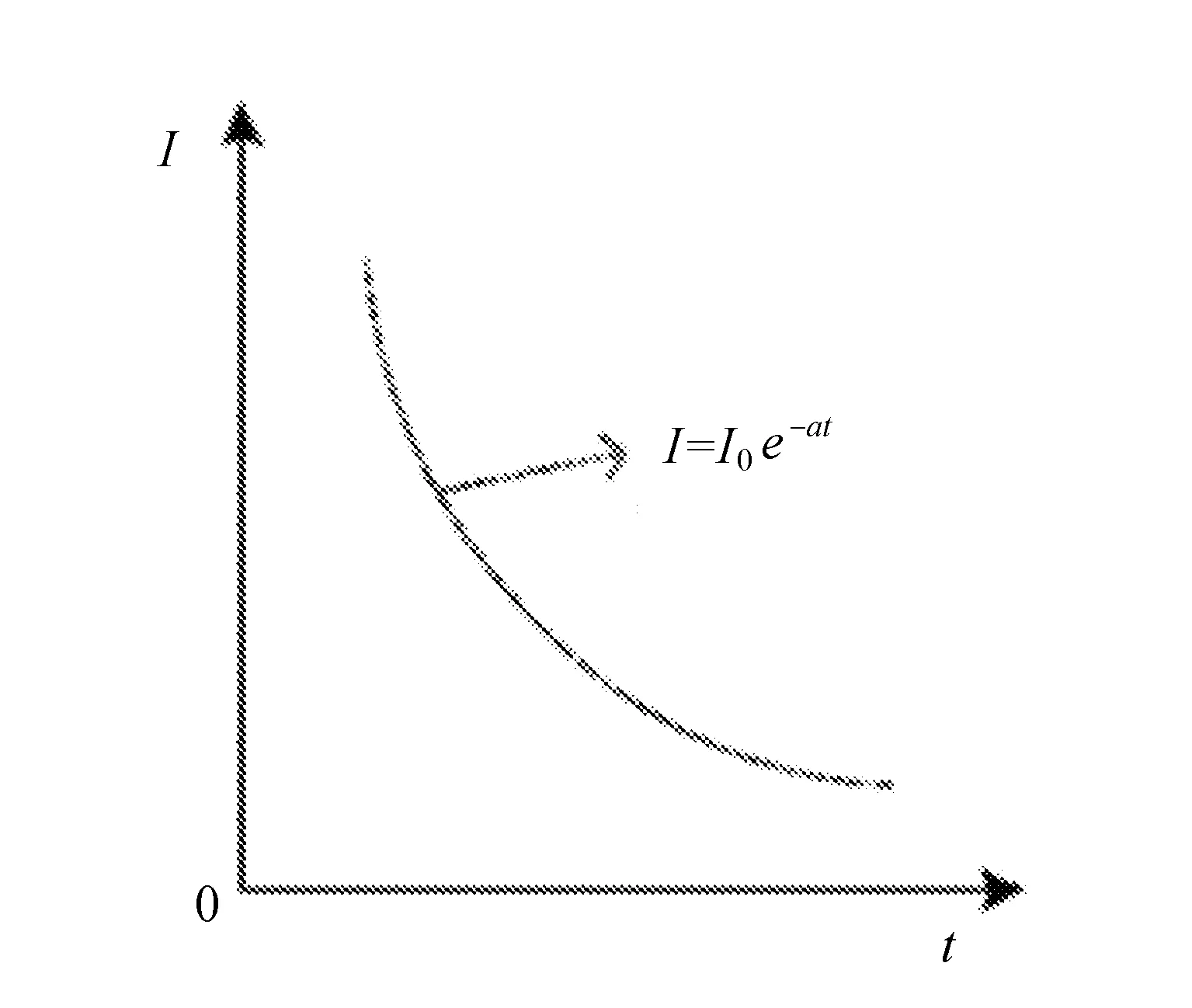
图3 马斯充电曲线
然而,理论上充电电流完全跟踪马斯曲线是无法实现的,因此各种“非理想”的近似充电方法应运而生,目前效果最好的是智能充电法[8]。
基于蓄电池SOC检测充电并采用智能充电方法,检测系统实时对蓄电池的电压、电流等参数进行采集,根据采集完后通过处理器估算出蓄电池当前的SOC值,进而采取相适应的电流。文中所涉及充电系统要求电池SOC值保持在70%以上,因此当SOC低于70%时立即开始充电,当电池的SOC值达到90%时停止充电。
要实现蓄电池智能充电,充电电流曲线需遵循马斯曲线。对于充电电流,可利用模糊控制器实现,模糊控制器通过采集蓄电池两端的电压及电压变化率,通过模糊推理计算出蓄电池的可接受充电电流。蓄电池智能充电模糊控制器结构框图[9]如图4所示。

图4 充电模糊控制器结构框图
模糊控制器的输入为蓄电池端电压与参考电压的偏差E以及相邻两次电压检测值的变化率EC,模糊控制器的输出为充电电流变化量U。由于充电过程中端电压一直处于上升阶段,因此偏差E的模糊语言集设为{PS,PM,PB,PVB},其量化论域为(0,1,2,3,4,5,6)。误差变化率EC的模糊语言集设为{NB,NS,ZE,PS,PB},其量化论域为(-3,-2,-1,0,1,2,3)。输入和输出的隶属度函数如图5所示。

(a)E的隶属度函数 (b)EC,U的隶属度函数
图5E,EC,U的隶属度函数
模糊控制规则见表1。
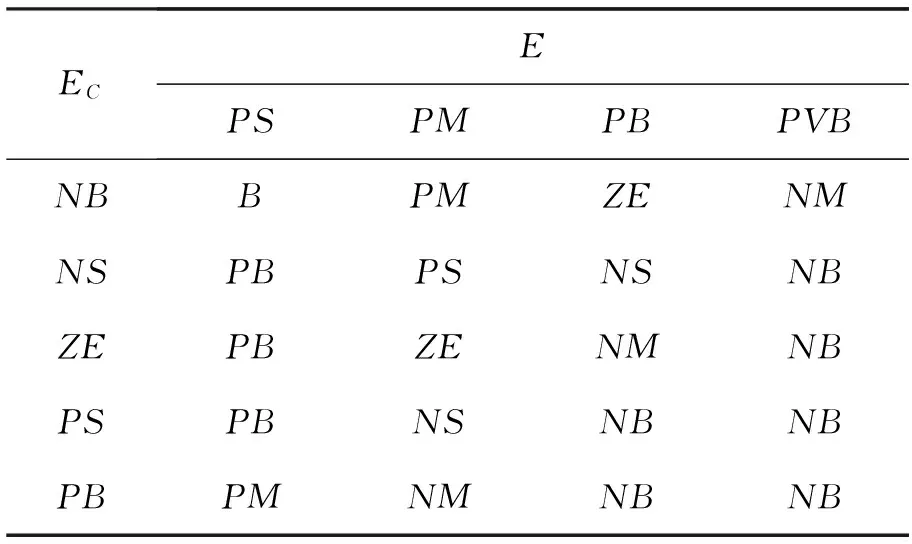
表1 模糊控制规则表
3 充电电路拓扑
使用Buck电路作为智能充电器的主电路,Buck电路可以依靠改变MOS管的导通占空比实现控制负载输出电压的大小,Buck电路原理图如图6所示。
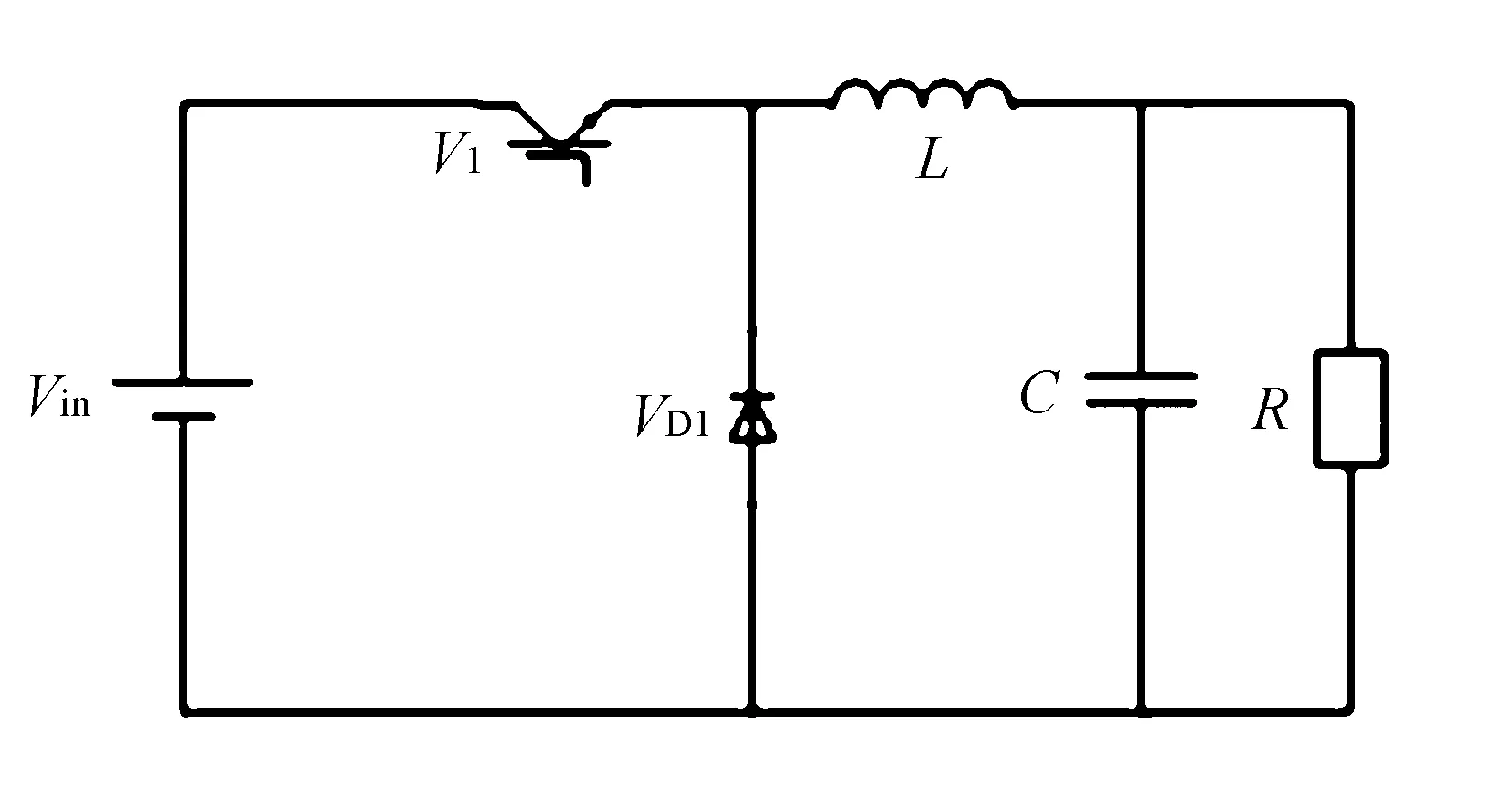
图6 Buck电路原理图
Buck型电路拓扑是由电源Vin、可控器件V1、续流二极管VD1、电感L、电容C等元件构成。其工作过程如图7所示。
在t0-t1期间,V1导通,此时电源Vin给负载供电,电感电流呈线性上升,电容C会同时充电,由于此时二极管承受反压,因此处于关断状态;在t1-t2期间,V1关断,此时电感电流不会突变,二极管承受正压导通电流,并与电感L和负载R构成闭环电路,VD1导通后即将电感左端电压嵌位相比于地点位拉低一个二极管的导通压降。此时,电感电流通过续流二极管VD1续流,电感电流线性下降。

图7 Buck电路工作过程
其输出电压UR满足下式:
(5)
式中:Vout----输出电压;
Vin----输入电压;
Ton----V1管导通时间;
T----触发脉冲的周期。
若Buck电路不加输出滤波器,则输出为脉动直流,无法满足蓄电池的充电需求,因此Buck电路后级采用LC滤波器对输出脉冲直流进行滤波,纹波电流的大小与输出电感存在直接关联:
(6)
输出纹波电压大小主要由输出滤波电容的等效串联电阻(ESR)造成,一般补偿电容的大小根据工程经验计算为:
(7)
式中:Vripple----根据系统设计指标选取;
Vripple/Iripple----选取的电容ESR值。
主电路开环设计无法满足电池的动态充电要求,因此需对电压和电流进行采样,对电池SOC进行估算如图8所示。

图8 蓄电池充电拓扑
当SOC值低于70%作为启动充电器的使能信号,大于90%作为关断充电器的使能信号,模糊控制器输出信号经过功率放大作为MOS管的驱动信号,实时调控输出占空比[10]。
4 电路仿真
依据图8所示电路,采用Matlab搭建铅酸蓄电池智能充电仿真模型如图9所示。

图9 智能充电器仿真模型
选用12 V/100 AH的铅酸蓄电池作为充电对象,基于Fuzzy工具箱建立的输入、输出函数隶属度函数如图10所示。

图10 输入、输出隶属度函数
分别仿真了当蓄电池SOC为70%和90%时的充电状态,充电电压、电流曲线如图11所示。
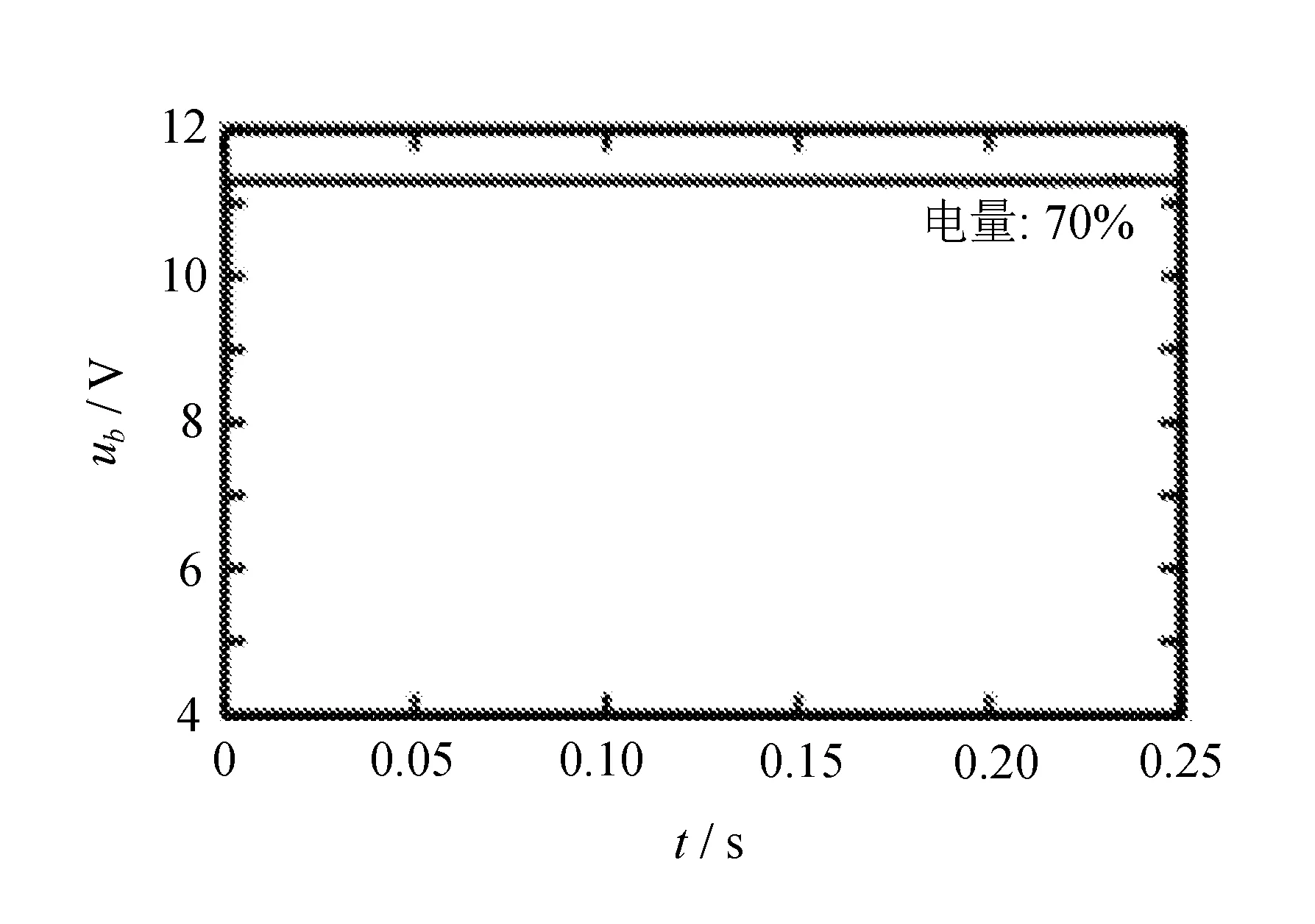

图11(a)SOC为70%时,电池的充电电流、电压,此时电流约为21 A,电压约为11.2 V。图11(b)SOC为90%时,电池的充电电流、电压,此时电流约为8 A,电压约为12.8 V。
从上述仿真结果来看,图8所示的基于模糊控制的Buck充电电路基本能满足铅酸蓄电池的充电需求。
5 实验验证
根据图8搭建系统实验平台,Buck电路的触发脉冲由DSP28335发出经驱动电路放大后产生。经过模糊控制后,SOC分别为70%和90%时,充电电压、电流实验波形如图12所示。
为了将模糊控制算法智能充电方式与普通二阶段充电的方式进行比较,对两种控制算法下整个电池充电过程中的电池电压、电流进行采样并且绘制成曲线,如图13所示。
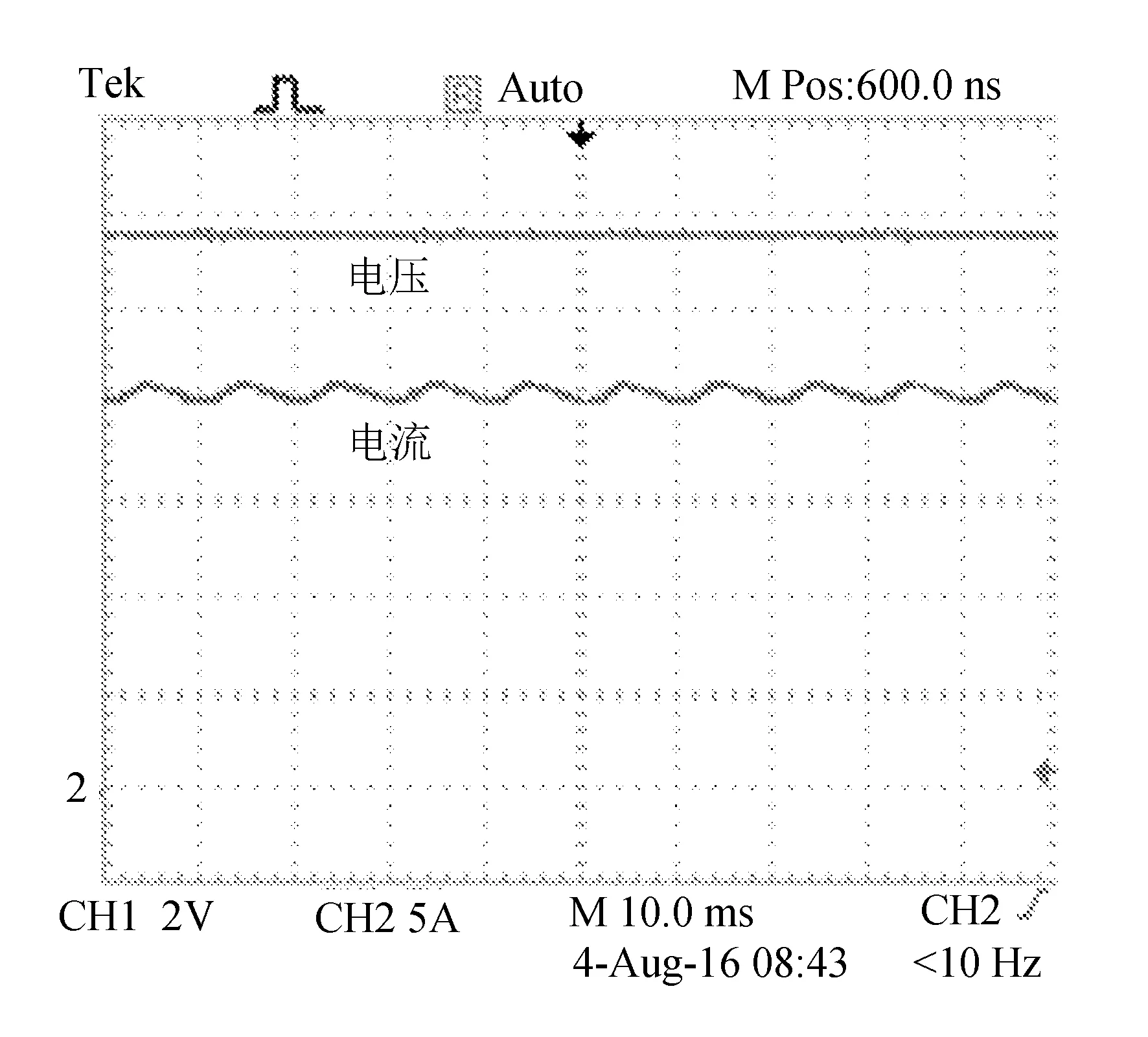
(a) SOC为70%时 (b) SOC为90%时
图12 充电电压、电流实验波形

图13 蓄电池充电电流、电压趋势图
从图中可以看出,模糊控制算法的充电电流走势基本与电池的最佳充电曲线趋势相同,这样说明采用模糊充电方式是一个有效的充电方式,模糊控制相比普通的控制算法具有更快的充电速度,同时充电电流平滑更加接近马斯特性曲线,可以达到快速充电的目的,并减少充电过程对于电池的损害,有利于电池的使用。
6 结 语
以Buck型DCDC变换器为基础的充电拓扑电路,设计了一种基于模糊控制算法的SOC预测的铅酸蓄电池智能充电方法。将对铅酸蓄电池的SOC进行估计的电动势法和DCDC充电拓扑的模糊控制相结合,并且采用铅酸蓄电池智能充电的斩波电路,搭建Matlab仿真和实验平台,验证了该方法的可行性。
[1] 周志敏,周纪海,纪爱华.充电器电路设计与应用[M].北京:人民邮电出版社,2005.
[2] 廖金华,李建黎.铅酸蓄电池充电技术综述[J].蓄电池,2010(3):132-135.
[3] 王源,程方晓,王旭.基于电池剩余电量估计的快速充电策略[J].长春工业大学学报, 2016, 37(6):555-560.
[4] 李文江,张志高,庄益诗.电动汽车用铅酸电池管理系统SOC算法研究[J].电源技术,2010,34(12):1266-1268,1286.
[5] 吴敬民.电动汽车用蓄电池的充电方式对电池性能的影响[J].蓄电池,2002,2(3):62-64.
[6] 李慧,肖伟,骆万博.电池剩余电量SOC估计[J].长春工业大学学报,2017,38(1):73-78.
[7] 王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
[8] Tomohiko I. Charging operation with high energy efficiency for electric vehicle valve-regulated lead-acid battery system[J]. J Paver Sources,2000,91(1):130-136.
[9] 徐成胜,邱东,王宏志.AOD炉溅渣护炉氮气流量模糊自适应PID控制[J].长春工业大学学报, 2016,37(3):256-260.
[10] 梁文瀚,贾文超.太阳能路灯模糊控制器. 长春工业大学学报:自然科学版,2012,33(2):146-150.
