基于PSCAD/EMTDC的HVDC换流器触发控制建模仿真
2017-03-16何正友
刘 磊,林 圣,何正友
(西南交通大学电气工程学院,四川 成都 610031)
Δφ=αo-αPCO+30°
tf=tf1+Δt
基于PSCAD/EMTDC的HVDC换流器触发控制建模仿真
刘 磊,林 圣,何正友
(西南交通大学电气工程学院,四川 成都 610031)
为准确分析高压直流输电(HVDC)的动态行为,针对PSCAD/EMTDC软件自带的换流器元件全封装导致仿真灵活性降低的问题,搭建了较详细的换流器触发控制模型。以自定义元件为基础,实现了目前工程广泛采用的等相位间隔触发控制。仿真分析了控制环节的响应特性,并将触发控制模型引入HVDC系统模型,对比仿真结果与工程实际录波,验证了所建模型的准确性。
HVDC;换流器触发控制;等相位间隔;PSCAD/EMTDC;建模仿真
0 引 言
高压直流输电(high voltage direct current,HVDC)以其在远距离、大容量输电和区域联网的显著优势在中国电力格局中占据着越来越重要的地位[1-3]。准确的HVDC电磁暂态模型对研究其动态行为、分析故障特性和研究交直流相互影响具有重要意义[4]。国际大电网会议(International Council on Large Electric systems,CIGRE)基于PSCAD/EMTDC软件搭建的基准模型(Benchmark)提供了较完善的模型库和控制方法,但对换流器触发控制部分采用了全封装形式,用户只能定义部分输入参数,查看部分输出变量,无法了解内部具体的控制方式,更不能手动调整[5]。当实际系统的换流器触发控制结构和参数改变时,模型就不再满足仿真需求。
目前关于HVDC控制系统的建模仿真已经有许多分析和探索[6-9],但对换流器触发控制进行详
细建模的文献较少。文献[10]介绍了锁相环、相控振荡器的实现方法,但未提出整体模型框架。文献[11]建立了基于ABB实际控制器的简化模型,但其模拟逆变侧故障时仿真结果与实测曲线有较大误差。
下面分析了等相位间隔触发控制的基本原理及关键环节的实现方法,并在PSCAD/EMTDC软件中自定义了相关元件,搭建了完整的换流器触发控制模型。控制环节及整体模型的仿真结果都验证了模型的准确性。
1 基本控制原理
换流器触发控制是HVDC系统控制和调节的基础,将触发角指令转化为触发脉冲,控制各个阀的触发时刻。采用的等相位间隔触发控制以保证各触发脉冲间相位间隔相等为控制目标,其基本原理[12-15]如下:
1)在确定某个阀的触发时刻时,利用上两个阀的触发信息对触发角指令进行等距性修正和换相电压同步修正,得到角度反馈量αPCO。
αPCO=Δα+(1-k)αPCO-1+kαPLL
(1)
Δα=Δφ-1-30°
(2)
式(1)中:Δα为等距性修正量;k为锁相环的影响因子(一般取0.05);αPCO-1对应上次触发阀;αPLL为根据锁相相位实测的触发角。式(2)中,Δφ-1是上两个阀触发脉冲的实测相位间隔。
2)根据触发角指令αo和αPCO确定当前阀触发时间间隔指令Δt。
Δφ=αo-αPCO+30°
(3)
(4)
3)以上个阀的触发时刻tf1为时间起点,确定当前阀的触发时刻tf。
tf=tf1+Δt
(5)
以12脉动换流器为例,系统正常运行时Δφ保持30°不变,αo-αPCO=0。
若触发角指令发生变化αo-αPCO≠0。由式(1)~式(3)可知,对于当前阀Δφ≠30°,但在等距性修正的作用下,下个阀触发时Δφ仍可恢复至30°。
若交流电压相位发生变化,αPLL≠αPCO。由式(1)~式(3)可知,在等距性修正和换相电压同步修正的共同作用下,αPLL与αPCO逐渐趋于相等,即触发脉冲缓慢跟踪相位变化,且尽可能保证Δφ为30°。
2 元件设计与模型结构
2.1 自定义元件设计
建模重点在于触发时刻信息的采集、αpLL的测量、脉冲产生逻辑的实现。对于以上功能,PSCAD/EMTDC软件均未提供相应的元件或组件,需自行设计。
2.1.1 触发时刻寄存元件

图1 触发时刻寄存元件外观图
为实现闭环控制,用上两个阀的实测触发间隔进行等距性修正,用上个阀的实测触发角进行换相电压同步修正。触发时刻寄存元件保证计算当前阀的触发时刻时,上两个阀的触发时刻信息未丢失。外观图如图1 所示。
引脚定义情况如表1所示。
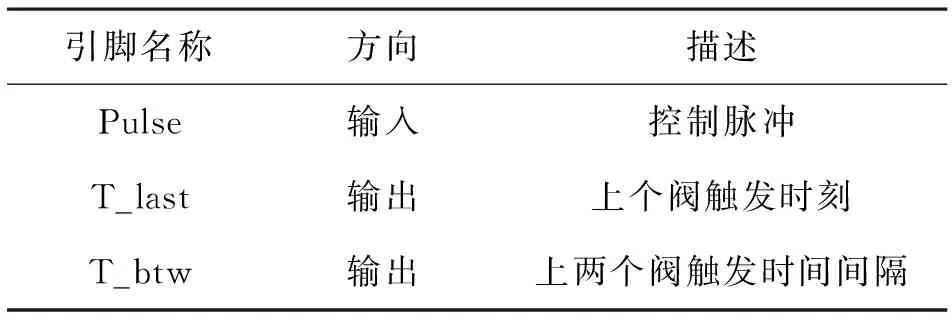
表1 触发时刻寄存元件引脚定义
实现原理如图2所示,图中tf i表示此前第i个阀的触发时刻,利用EMTDC提供的两个存储单元专门存储tf1和tf2,Si表示此前第i个阀触发后两个存储单元中的内容。

图2 触发时刻寄存元件实现原理
每个仿真步长都判断是否有新的脉冲到达,若是,则从当前时刻开始,新到达的脉冲变为“上个阀触发脉冲”,此前所认为的“上个阀触发脉冲”变为“上上个阀触发脉冲”,故用tf1更新tf2,并用新脉冲到达时刻更新tf1;否则不做更新。由图2可知,从时间轴上任意一点来看,两个存储单元里均为此前两个阀的触发时刻数据。
由于仿真步长很小(10 μs),可及时捕捉到脉冲并判断是否更新。
2.1.2 换相电压过零时刻计算元件
根据各阀对应换相电压的锁相相位可判断其过零时刻,以求得准确的αpLL。元件外观图如图3所示。
引脚定义情况如表2所示。
实现原理如图4所示,对A、B、C三相交流电压相位的正弦、余弦分别锁相,可得到6个稳态时相位
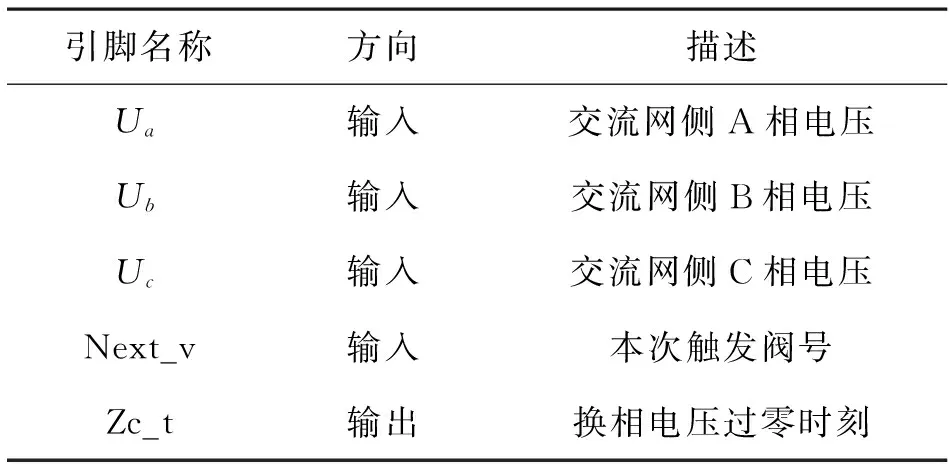
表2 换相电压过零时刻计算元件引脚定义
相差60°的斜坡信号,其值均在0°~360°变化。分别检测各斜坡信号的过零时刻和值为180°时刻,可得12个换流阀分别对应的换相电压过零时刻。任何时刻只需输出本次触发阀最近一次换相电压过零时刻。

图4 换相电压过零时刻计算元件实现原理
PLL锁相环采用PSCAD/EMTDC软件自带元件。过零时刻检测思路与2.1.1类似,利用12个存储单元分别寄存12个阀对应的换相电压过零时刻,以斜坡信号幅值大小为更新条件。阀号与换相电压过零点的对应关系如表3所示,负号表示波形的负过零点。

表3 阀号与换相电压过零点对应关系
2.1.3 脉冲产生元件
元件利用触发间隔信号得到控制脉冲,再转换为触发脉冲分配给各阀。外观图如图5所示。
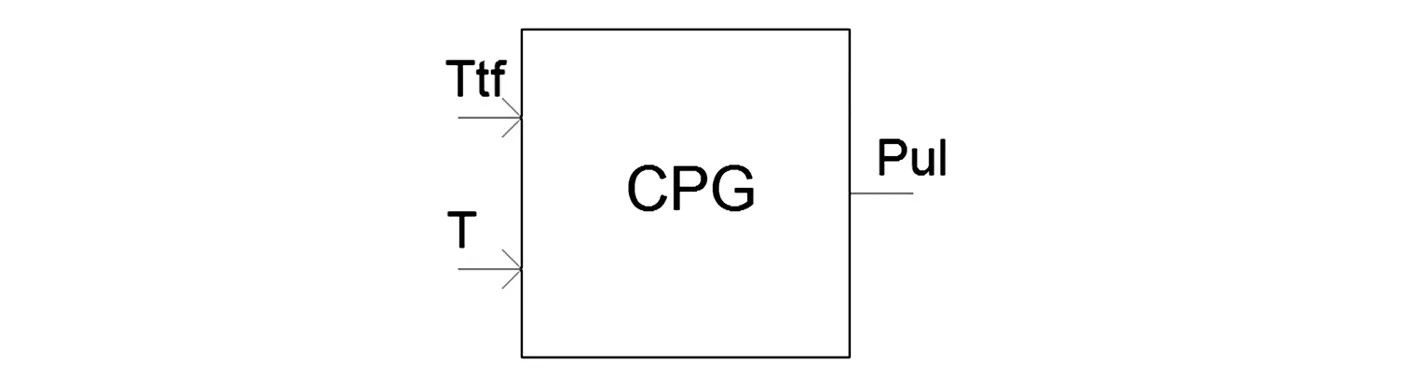
图5 脉冲产生元件外观图
引脚定义情况如表4所示。控制脉冲产生原理如图6所示。稳态时两个相邻触发脉冲Δφ=30°,

表4 脉冲产生元件引脚定义
图中对应线1。暂态时在系统调节作用下,Δφ可能在30°附近波动,图中对应线2。在每一个仿真步长判断当前相位与最近一次触发相位的差Δφnow是否≥Δφ,若是则立即产生一个控制脉冲,并更新Δφnow。如此循环,可以得到满足触发间隔要求的脉冲序列。

图6 控制脉冲产生原理
将控制脉冲转换为12个触发脉冲对应各阀,原理如图7所示。图中Pre_v为上次触发阀号,Next_v为待触发阀号,Pi为i阀的触发信号。阀选择逻辑可根据Pre_v得到Next_v。采样保持器每到达一个控制脉冲,Next_v通过采样保持器成为Pre_v,此时触发脉冲产生模块立即将Pre_v变为高电平,持续120°;同时阀选择逻辑计算出新的Next_v。如此循环,最终产生的12个触发脉冲同时满足触发顺序和触发间隔要求。
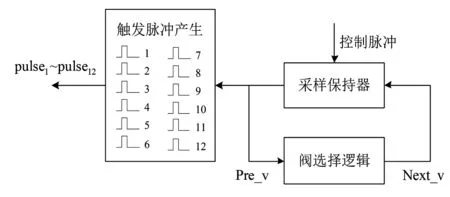
图7 触发脉冲产生原理
2.2 模型结构
模型整体结构框图如图8所示。
用来自极控系统的αo和来自相控振荡器的αPCO计算Δt,并根据不同工况设置限幅,以满足直流系统整体稳定性的相关特性要求。Δt经过脉冲产生元件后,得到作用于换流器的触发脉冲及用于计算反馈量的控制脉冲。时刻寄存元件将控制脉冲转化为两个时间量,相控振荡器结合αPLL、Δφ-1和上个计算周期的αPCO得到新的αPCO,实现闭环控制。

图8 模型结构框图
3 仿真分析
为验证模型准确性,仿真分析重要控制环节的响应特性,并将引入所建模型的直流系统模型仿真结果与工程实际录波对比。
以灵州—绍兴±800 kV直流工程一次参数为基础,在PSCAD/EMTDC软件中搭建直流测试系统模型如图9所示。AC_1、AC_2分别为整流侧、逆变侧交流系统,用电压源串联阻抗的戴维南等值电路代替,ACF为交流滤波器,DCF为直流滤波器。控制系统中主控、极控模型根据测试需求,在实际控制的基础上进行一定简化,未考虑变压器分接头控制、顺序控制等动作时间较长的控制功能,换流器触发控制采用所建模型。
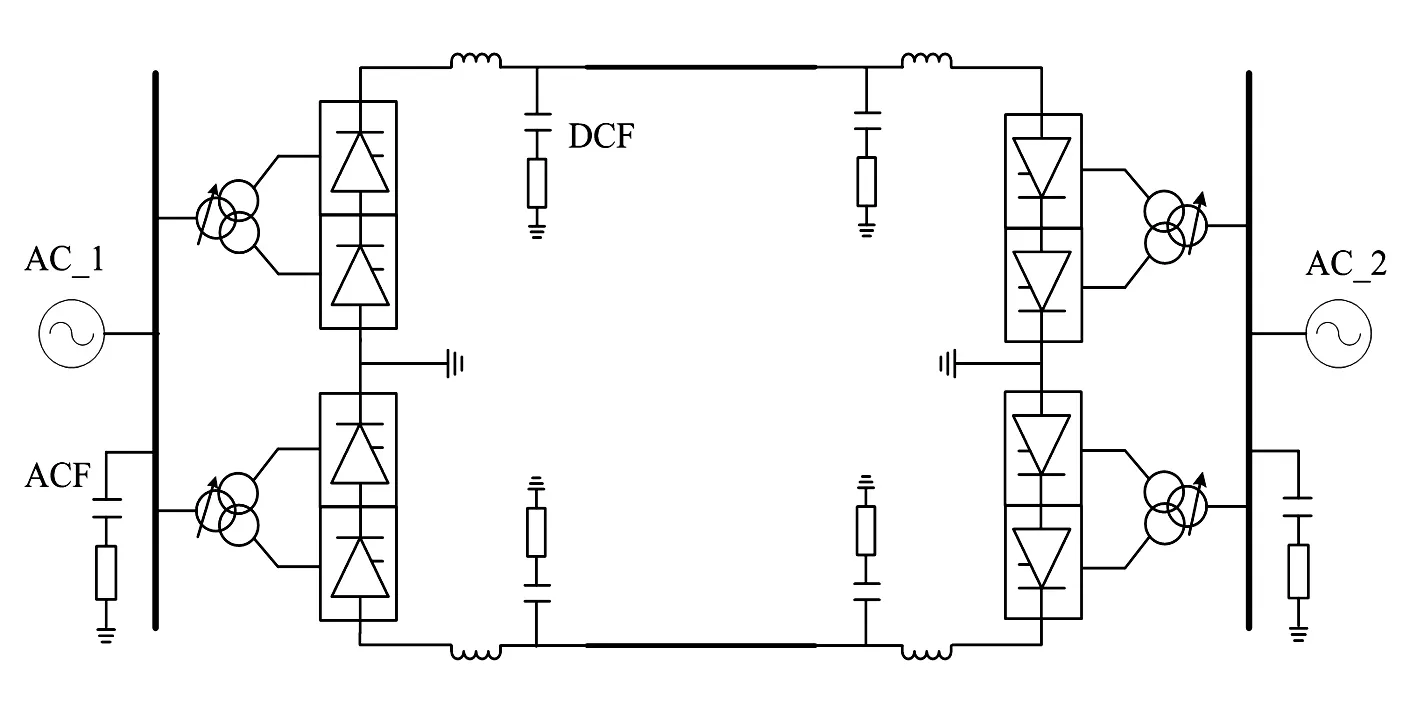
图9 直流测试系统
3.1 换流器触发控制环节响应特性
模拟整流侧交流母线在0.6 s时发生三相短路故障,持续0.05 s。
αPCO与αo仿真波形如图10所示。系统稳定运行时二者基本拟合,触发脉冲等相位间隔;故障期间,αo下降至5°,但交流电压的异常导致αPLL计算错误,进而影响αPCO使其剧烈变化;故障恢复后,αo被整流侧最小触发角控制器限制在30°,一段时间后逐渐恢复为15°,在此期间交流电压正常,触发模型的负反馈调节作用使αPCO能快速跟踪αo,保持等相位间隔触发。
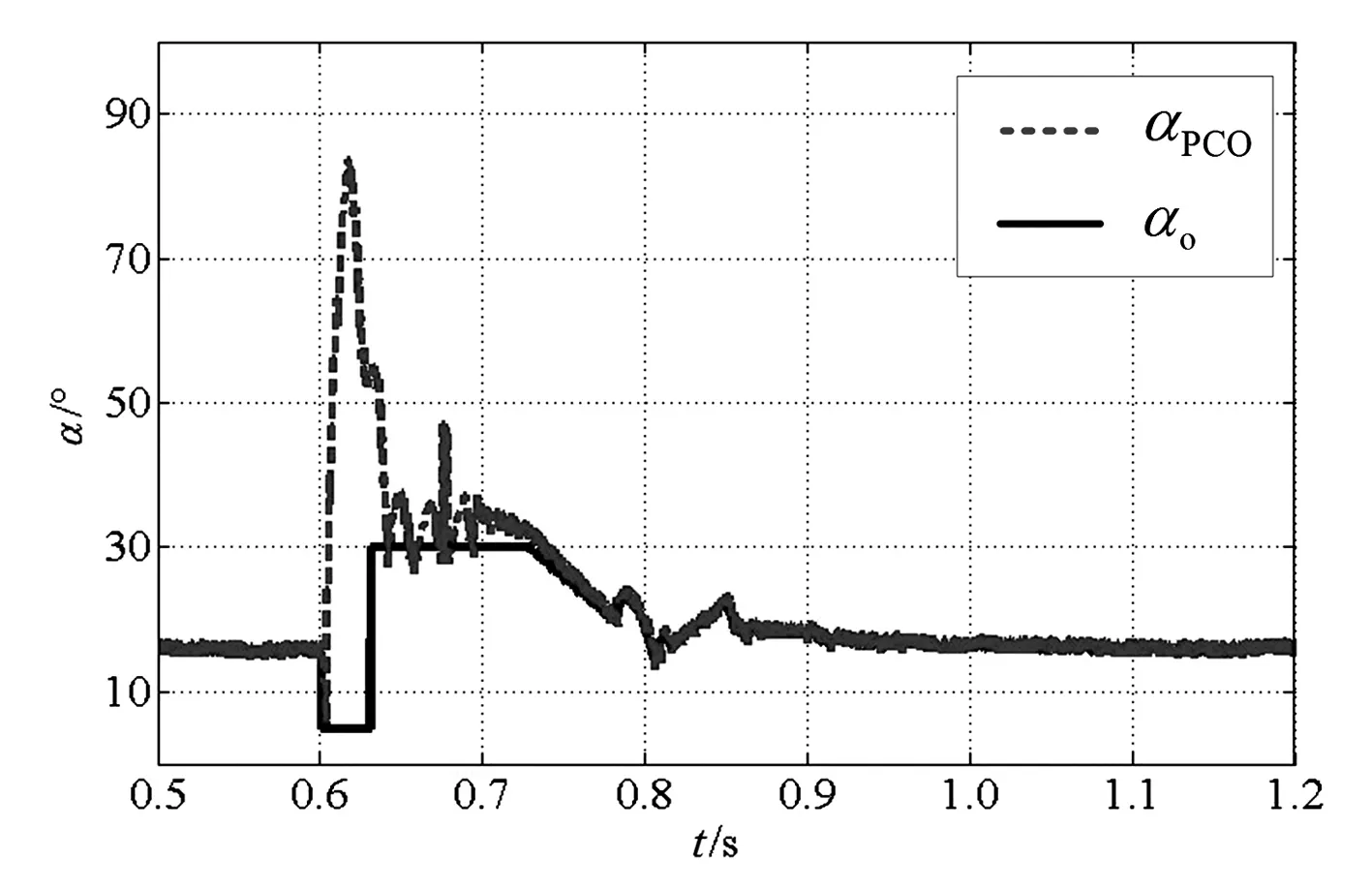
图10 整流侧三相故障αPCO与αo仿真波形对比
脉冲产生元件的输入与输出控制脉冲波形如图11所示。故障期间,在αPCO、αo及限幅逻辑的共同作用下,Δt由1.64 ms下降至1.10 ms。在此暂态过程中,控制脉冲的实测间隔总与Δt保持一致。

图11 触发间隔与控制脉冲仿真波形
3.2 模型整体仿真验证
模拟逆变侧交流母线在0.6 s时发生三相短路故障,持续0.05 s。对比相同故障条件下仿真波形与灵州—绍兴直流系统联调试验实测波形,结果如图12所示。
故障时,逆变侧发生换相失败,直流电压迅速降低,直流电流增大。整流侧在定电流控制作用下,触发角增大,电压减小,抑制电流增大。故障消除后,逆变侧电压恢复,各物理量恢复正常。可以看出,仿真得到的直流电流、直流电压及触发角变化趋势基本准确。系统恢复过程中仿真结果与实际有一定差别(仿真整流侧一直保持定电流控制,而实际有0.1 s左右为定最小触发角控制),其原因是极控系统模型调节功能、控制参数等无法与实际完全一致,导致暂态过程中整流侧控制模式切换有差异。
4 结 论
1)基于PSCAD/EMTDC软件自定义了等相位间隔触发控制所需控制元件,在其基础上设计了HVDC换流器触发控制整体模型结构,提高了建模仿真灵活性。

(1)整流侧直流电压

(2)逆变侧直流电压

(3)直流电流

(4)
2)各控制环节响应特性与理论相符,模型可实现等相位间隔触发,且触发间隔信号可精确转化为脉冲信号。
3)采用所提触发控制模型的直流输电系统模型仿真结果与实际系统动态响应基本一致,验证了所提模型的准确性及可行性。
[1] 赵婉君.高压直流输电工程技术[M].北京:中国电力出版社,2004.
[2] 郑超.直流逆变端扰动对整流端影响机制及应对措施[J].中国电机工程学报,2016,36(7):1817-1827.
[3] 汤奕,陈斌,皮景创,等.特高压直流分层接入方式下受端交流系统接纳能力分析[J].中国电机工程学报,2016,36(7):1790-1800.
[4] 刘云,蒋卫平,印永华,等.特高压直流大电网的数模混合实时仿真系统建模[J].电力系统自动化,2008,32(12):52-56.
[5] 董曼玲,谢施君,何俊佳,等.采用ATP/EMTP的CIGRE HVDC建模与仿真[J].高电压技术,2010, 36(3):796-804.
[6] 雷霄,许自强,王华伟,等.±800 kV特高压直流输电工程实际控制保护系统仿真建模方法与应用[J].电网技术,2012,37(5):1359-1364.
[7] 黄志岭,田杰.基于详细直流控制系统模型的EMTDC仿真[J].电力系统自动化,2008,32(2):45-48.
[8] 刘文焯,汤涌,万磊,等.大电网特高压直流系统建模与仿真技术[J].电网技术,2008, 32(22):1-3.
[9] Faruque M O,Zhang Y Y,Dinavahi V. Detailed Modeling of CIGRE HVDC Benchmark System Using PSCAD/EMTDC and PSB/SIMULINK[J]. IEEE Transactions on Power Delivey, 2006,21(1):378-387.
[10] 熊凌飞.HVDC换流阀触发控制模型研究[D].北京:华北电力大学,2011.
[11] 万磊,丁辉,刘文焯.基于实际工程的直流输电控制系统仿真模型[J].电网技术,2013,37(3):629-634.
[12] ABB,Overview of the HVDC Control system[G] .IJNL100033-106.
[13] ABB,Converter Firing Control Technical Report[G] .IJNL100037-013.
[14] 陶瑜.直流输电控制保护系统分析及应用[M].北京:中国电力出版社,2015.
[15] 李兴源.高压直流输电运行与控制[M].北京:科学出版社,1998.
In order to accurately analyze the dynamic behavior of high voltage direct current (HVDC) and solve the problem that the full package of converter components in PSCAD/EMTDC software reduces the flexibility of simulation, a detailed converter firing control model is established. Based on custom component, the control of evenly spacing in phase which is widely adopted by actual HVDC transmission project is implemented in the firing control. The response characteristics of the control aspects are analyzed. The converter firing control is applied to HVDC model, and the simulation results are compared with the recorded field commissioning curves of HVDC transmission project. The comparison results show that the accuracy of the proposed control model is satisfied.
HVDC; converter firing control; evenly spacing in phase; PSCAD/EMTDC; modeling and simulation
国家自然科学基金资助项目(51307145)
TM771
A
1003-6954(2017)01-0014-05
2016-10-27)
刘 磊(1993),博士研究生,研究方向为高压直流输电控制与保护。
