Lokomat下肢康复机器人对改善帕金森病患者步行能力的疗效研究
2017-03-12刘燕平陈美云
刘燕平,陈美云
帕金森病(Parkinson's disease, PD)是一种中枢神经系统锥体外系慢性进展性疾病。姿势性步态异常是导致PD患者运动功能障碍的主要原因之一[1]。步态异常主要表现为姿势异常,四肢和躯干部主要肌群肌力下降,平衡功能下降,行走时起步困难、步幅减小、不能随意骤停、转身困难、动作缓慢,称为“慌张步态”。帕金森病患者存在步行功能障碍,增加跌倒风险,严重影响患者日常生活能力。因此,研究改善帕金森病患者步行能力的方法具有较大的意义。目前,临床中已应用下肢康复机器人于PD患者,但国内缺乏其报道。基于上述背景,本研究拟观察Lokomat下肢康复机器人对帕金森病患者步行能力的影响。
1 资料与方法
1.1 一般资料 选择2015年3月~2016年2月在福建中医药大学附属康复医院门诊及住院PD患者40例。诊断标准参考1988年帕金森病诊断标准[2]。40例PD患者随机分为2组,各20例。①观察组:男13例,女7例;平均年龄(58.7±9.8)岁;病程(3.1±1.1)年。②对照组:男12例,女8例;平均年龄(56.5±10.8)岁;病程(3.3±0.8)年。2组患者性别、年龄、病程等一般资料对比差异无统计学意义,具有可比性。
1.2 方法 2组均给予帕金森病常规康复训练,观察组加用下肢康复机器人辅助步行训练。①常规康复治疗:主要包括a.放松训练;b.呼吸训练;c.牵伸训练,包括脊柱和四肢屈曲肌群的牵伸;d.姿势训练,包括靠墙站立训练和借助姿势镜进行姿势矫正训练;e.转移训练,包括翻身训练、卧坐转移训练、坐站转移训练;f.平衡训练,包括坐位平衡训练和站立平衡训练,一开始进行静态训练、左右重心移动训练和徒手在不同方向施加推力,然后借助平衡板和平衡垫进行训练;g.步行训练,包括跨步训练、原地踏步训练、转身训练、借助视觉如足印标记进行步行训练。每次训练30min,每天1次,每周5d,持续10周。以上训练由专业康复治疗师进行,训练中应避免引起患者过度疲劳。②下肢康复机器人辅助步行治疗方法:采用Lokomat下肢康复机器人训练系统,主要由外骨骼式矫正器、减重支持系统和运动跑台组成。治疗师按操作步骤将患者固定于外骨骼矫正器内,根据患者的个体差异性设置参数,患者站在下肢机器人运动跑台上进行减重支持步行训练,治疗强度为30%~50%的减重支持、30%~90%的引导力量、1.5~2.5km/h的步行速度、30min的步行持续时间,每天1次,每周5d,持续10周。以上治疗由此经过Lokomat下肢康复机器人培训认证通过的物理治疗师协助完成。
1.3 评定标准 治疗前后给予以下评定。①采用Berg平衡量表(BBS)评定平衡功能:BBS包括14项评价项目,每个项目评分范围包括0~4分,分数越高显示平衡功能越好。②用计时起立-行走测试(time up and go test, TUGT)评定功能性步行能力及预测跌倒风险:患者从背靠椅上站起,按平时走路的步态,向前走3m,过3m标记处后转身,然后走到椅子前,转身坐下,靠在椅背上。耗时越短,说明功能性步行能力越好;>13.5s提示有跌倒风险。③用6min步行测试(6 minute walk test, 6MWT)评价步行耐力:在平坦的地面划出一段长达30m的直线距离,两端各置一标志。患者在其间往返走动,要求其在6min内走尽可能远,步履缓急由患者根据自己的体能决定,记录其所能走的最长距离。距离越远提示步行耐力越好。

2 结果
治疗10周后,观察组BBS、6MWT评分较治疗前及对照组明显提高(P<0.05),TUGT评分较治疗前及对照组明显降低(P<0.05);对照组BBS评分较治疗前提高(P<0.05),6MWT及TUGT评分治疗前后比较差异无统计学意义。见表1。

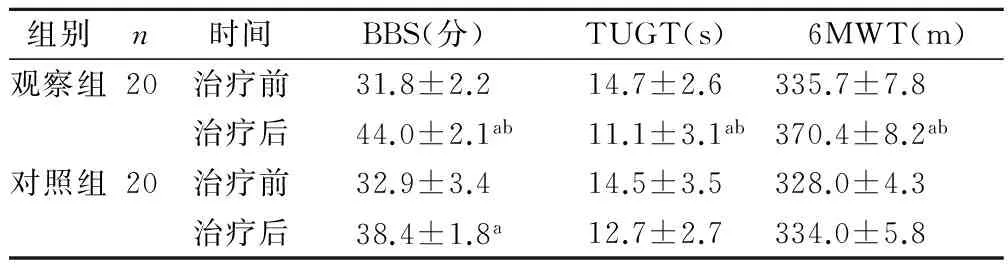
组别n时间BBS(分)TUGT(s)6MWT(m)观察组20治疗前31.8±2.214.7±2.6335.7±7.8治疗后44.0±2.1ab11.1±3.1ab370.4±8.2ab对照组20治疗前32.9±3.414.5±3.5328.0±4.3治疗后38.4±1.8a12.7±2.7334.0±5.8
与治疗前比较,aP<0.05;与对照组比较,bP<0.05
3 讨论
帕金森病是中老年患者常见的神经系统变性疾病。据统计,在50岁以上人群中,其发病率为70.7/10万人口,65岁以上人群总体患病率为1.7%[3],并随年龄增长而升高致残率高,据报道,发病1~5年后,致残率为25%,5~9年达66%[4]。大多数PD患者存在平衡和步行能力下降,增加了跌倒风险,严重影响患者日常生活能力和生活质量。改善PD患者步态的方法有许多,一些研究者已经证实节律性视觉和听觉刺激[5]、减重支持系统[6]等可改善PD患者的步行功能。Lokomat下肢康复机器人辅助步行训练是近年来颇受关注的步行训练新方法之一,是基于“重复、集中、任务导向”的理念,帮助患者模拟正常的生理步态模式进行步行训练[7]。PD引起的步态异常是下肢康复机器人的适应症之一,国外已应用于临床,并有研究者对其疗效进行报道。Alessandro等[8]学者将41例PD患者随机分入下肢训练组和常规物理治疗组,下肢机器人采用GT1(Reha-Stim, Berlin, Germany),训练4周后,发现下肢机器人可改善PD患者步行能力和步态,效果优于常规物理治疗组。然而Stefano等[9]学者观察PD患者经过4周的Lokomat下肢康复机器人辅助步行训练患者步行能力的改变以及6个月的追踪,发现虽然Lokomat下肢机器人可改善PD患者的步行能力,但是效果并不优于活动平板训练。在国内已广泛应用Lokomat下肢康复机器人于PD患者,但是缺乏其研究报道。因此,本研究探讨下肢康复机器人对于PD患者步行能力的影响具有重要的现实意义。
本研究结果显示,治疗组在训练后BBS、TUGT和6MWT与治疗前比较有显著性提高(P<0.05),提示Lokomat下肢康复机器人可提高PD患者平衡能力、步行能力和步行耐力。治疗组训练后BBS、TUGT和6MWT与对照组相比较差异有统计学意义(P<0.05),提示Lokomat下肢康复机器联合常规康复训练方法治疗PD比单用常规治疗效果较好。其可能原因为:①PD患者步行异常与下肢肌肉不均衡相关,表现为髋关节和膝关节过度屈曲、踝关节跖屈,导致足跟着地作用降低,影响步行能力。Lokomat下肢康复机器人辅助步行训练提高髋膝踝控制能力和肌力,进而提高患者平衡能力和步行能力。②PD患者步行时启动延迟、步长偏短、步频偏快等特点,下肢机器人训练刺激其“中枢模式发生器”(center pattern generator, CPG),当特定感觉传入后,CPG产生步行中屈肌和伸肌交替转换的神经节律冲动[10],对于PD患者可提供节律性的启动,改善PD患者步行时启动困难。重复的正常步长和步速等步态参数输入改善PD患者步长偏短及步频偏快的特点。③PD患者表现为肌肉易疲劳,耐力差。下肢康复机器人长期稳定的运动输入,提高患者步行能力和步行耐力。④PD患者的运动功能可以是正常的,但是需要激活。PET扫描显示PD患者在运动时前额叶和补充运动区未激活,而非基底节依赖的神经环路则代偿性活化,以促进与外界环境进行有意识的交互作用。Lokomat下肢康复机器人训练一方面提供运动感觉的输入进行激活,另一方面,通过下肢机器人提供实时运动视觉反馈,提高PD患者注意力,以改善步态参数。
因此,研究Lokomat下肢康复机器人结合常规治疗能改善帕金森病患者的步行能力,是帕金森病的一种有效治疗方法,可在临床上进行推广。然而,本研究尚未观察其疗效的维持时间,有待进一步的研究。
[1] Frazita G, Maestri R, Ucelini D, et al. Rehabilitation treatment of gait in patients with Parkinson's disease with freezing:a comparison between two physical therapy protocols using visual and auditory cues with or without treadmill training[J]. Mov Disord, 2009, 24(8): 1139-1143.
[2] Gibb WR, Lees AJ. The relevance of the Lewy body to the pathogenesis of idiopathic parkinson's disease[J]. J Neurol Neurosurg psychiatry, 1988, 51(6): 745-752.
[3] 中华医学会神经病学分会帕金森病及运动障碍学组. 中国帕金森病治疗指南(第3版)[J]. 中华神经科杂志, 2014, 47(6): 428-433.
[4] 缪鸿石主编. 康复医学理论与实践[M]. 上海: 上海科学技术出版社, 2000, 1893-1903.
[5] 黄瓅, 王普清, 罗韵文, 等. 节律性听觉刺激及视觉刺激对帕金森病患者步态的影响[J]. 中国康复, 2015, 30(2): 124-125.
[6] 宋金辉, 王普清, 罗韵文, 等. 减重步行训练对帕金森病患者步态的影响[J]. 神经损伤与功能重建, 2014, 9(5): 441-442.
[7] 王俊, 廖麟荣, 杨振辉, 等. 运动想象结合下肢康复机器人训练对脑卒中患者步行障碍的影响[J]. 中国康复医学杂志, 2015, 30(6): 542-546.
[8] Alessandro P, Camilla M, Francesca O, et al. Robot-Assisted gait training in patients with Parkinson Disease: A randomized controlled trial[J]. Neurorehabilitation and Neural Repair, 2012, 26(4): 353-361.
[9] Stefano C, Marco I, Alessio B, et al. Robotic gait training is not superior to conventional treadmill training in patients with Parkinson Disease: A singled-blind randomized controlled trial[J]. Neurorehabilitation and Neural Repair, 2012, 26(9): 1027-1034.
[10] 王俊, 杨振辉, 刘海兵, 等. 下肢康复机器人在脑卒中患者步行障碍的应用和研究进展[J]. 中国康复医学杂志, 2014, 29(8): 784-788.
