基于快速余差查表法的脉冲多普勒雷达解距离模糊算法
2017-03-10洪兴勇
洪兴勇
(中国电子科技集团公司第三十八研究所,安徽 合肥 230031)
基于快速余差查表法的脉冲多普勒雷达解距离模糊算法
洪兴勇
(中国电子科技集团公司第三十八研究所,安徽 合肥 230031)
解距离模糊是中频脉冲重复频率的脉冲多普勒雷达关键技术之一。提出了采用快速余差查表法有效解决PD雷达距离模糊问题的算法。该算法的运算量较少,实时处理能力强。以3重CPI进行仿真实验,表明该算法能够保证低虚警概率和较高的解模糊的正确性,并能够满足PD雷达信号处理的实时处理要求。
PD雷达;解距离模糊;快速;余差查表法
0 引言
机载雷达以下视方式探测低空目标时,目标、地海杂波和雷达三者之间存在相对运动,目标回波强度远远小于地面和海杂波强度[1]。脉冲多普勒(PD)利用频域滤波区分目标和地海杂波。PD在机载雷达信号处理上得到广泛的应用。由于PD模式雷达大多采用高中脉冲重复频率(PRF),因此存在距离和速度模糊的问题。PD体制雷达的解模糊是机载雷达信号处理在实际应用中的首要问题。解模糊的性能取决于解模糊算法,解模糊算法的好坏直接影响目标的检测概率和虚警概率,进而直接影响机载雷达的数据处理、跟踪能力和探测威力。正确性和实时性是衡量解模糊算法的两个要素。
PD雷达采用多重频的PRT方式避免距离模糊现象发生。最近文献[2-3]提出新算法:余差查表法、群算法、滑窗相关器法和加权快速聚类法解距离模糊,而这些算法都是在孙子定理(余数法)、查表法和一维聚类基础上提出来的。孙子定理法优点是快速准确且计算量小,其缺点是要求PRT两两互质(互质是指相互之间没有公约数,但不一定都是质数)和出错概率很大(由于各种干扰、噪声和杂波存在)。一维集算法优点是解模糊的精度很高,其缺点是运算量大。查表解模糊算法具有计算简单和出错概率小的优点。利用余数法和查表法的优点,本文提出了一种快速余差查表解距离模糊算法。
1 PD雷达距离模糊问题

图1 距离不模糊
设PD雷达发射信号的脉冲重复周期为Tr,发射信号波长为λ,雷达探测回波目标的时间延迟为t,c为光速。t>Tr时,雷达发射脉冲探测目标的回波要经过几个脉冲重复周期以后才能被雷达接收机接收到,使发射和接收脉冲频谱对应关系在频域出现混乱现象,在同一距离上可能出现几个目标的频谱。这种现象称作雷达模糊距离。雷达最大不模糊距离为:
(1)
当t≤Tr时,PD雷达探测的目标距离不模糊,如图1所示; 当t>Tr时,PD雷达探测的距离模糊,如图2所示。
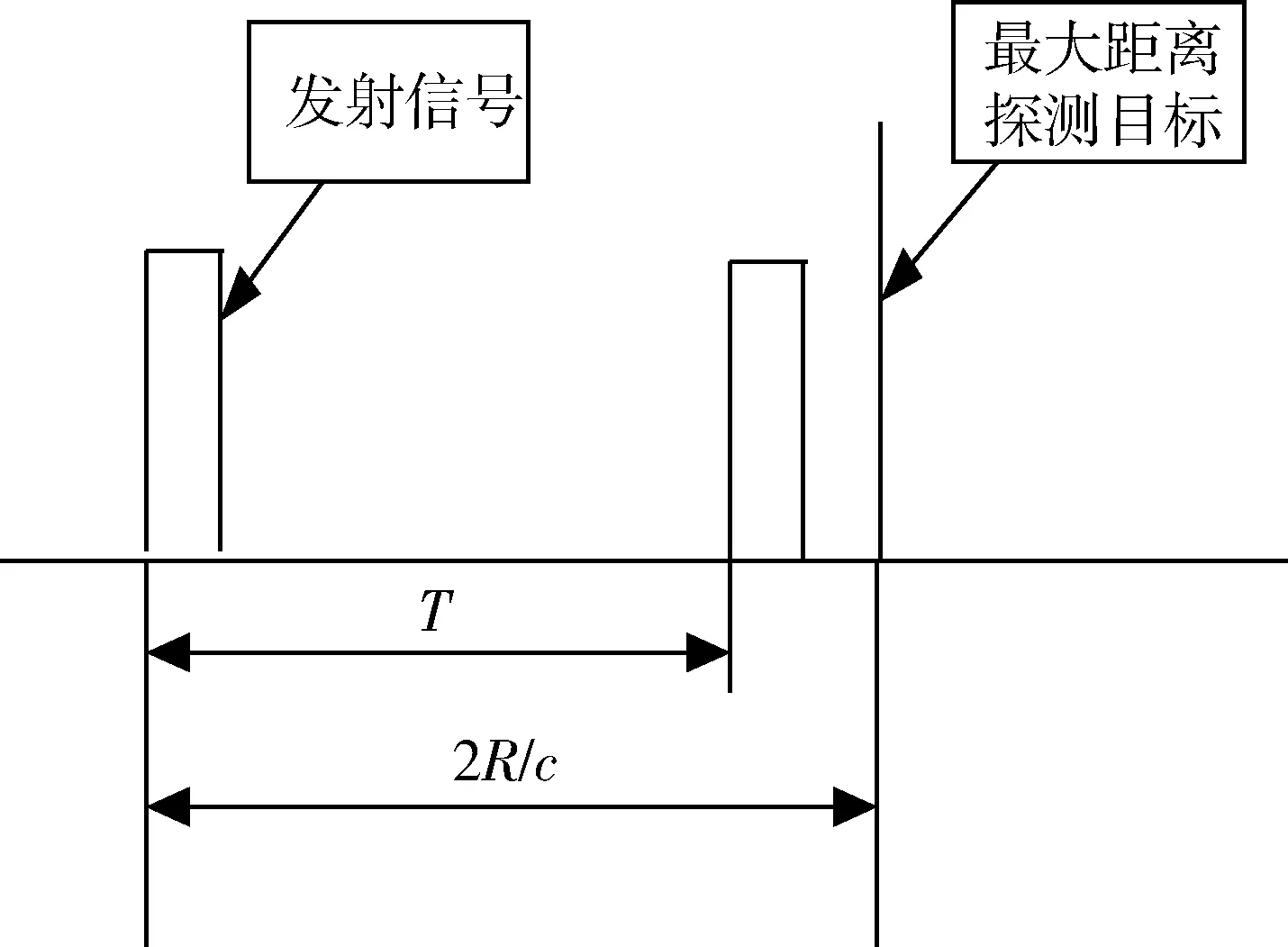
图2 距离模糊
PD雷达产生距离模糊的原因是:PD雷达无法直接区分一个特定回波是哪个脉冲所发射的。
ri=R%Ri,i=1,2,…,N
(2)
该式形成过程是一维空间到多维有限空间变换。而解模糊问题其实就是从多维有限空间到一维有限空间变换[4]。
2 建立距离余差表

(1)在雷达探测威力范围内,分别列出目标对于每个PRF所有可能的距离模糊倍数对应的距离R1,R2,…,RK,其中,K取决于Rki=ri+kiRuai(i=1,2,3)中的ki(i=1,2,3)。
(2)按照3重CPI计算的Rua1、Rua2、Rua3从小到大排列。
(4)PD雷达探测某个距离为R的目标,从表1快速查找每个CPI所对应的可视距离mod(R,Ruai),查找结果大于或等于2个CPI,则表明解距离模糊完成,PD雷达在距离R上所探测目标是实际存在的目标。
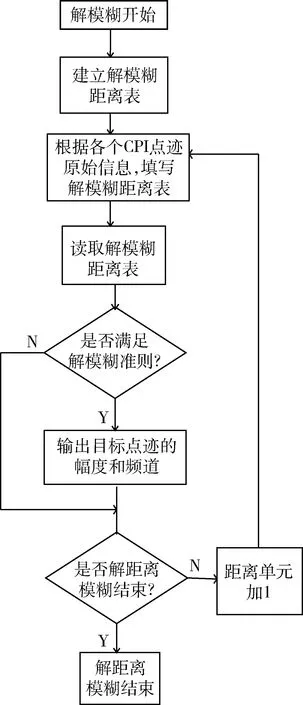
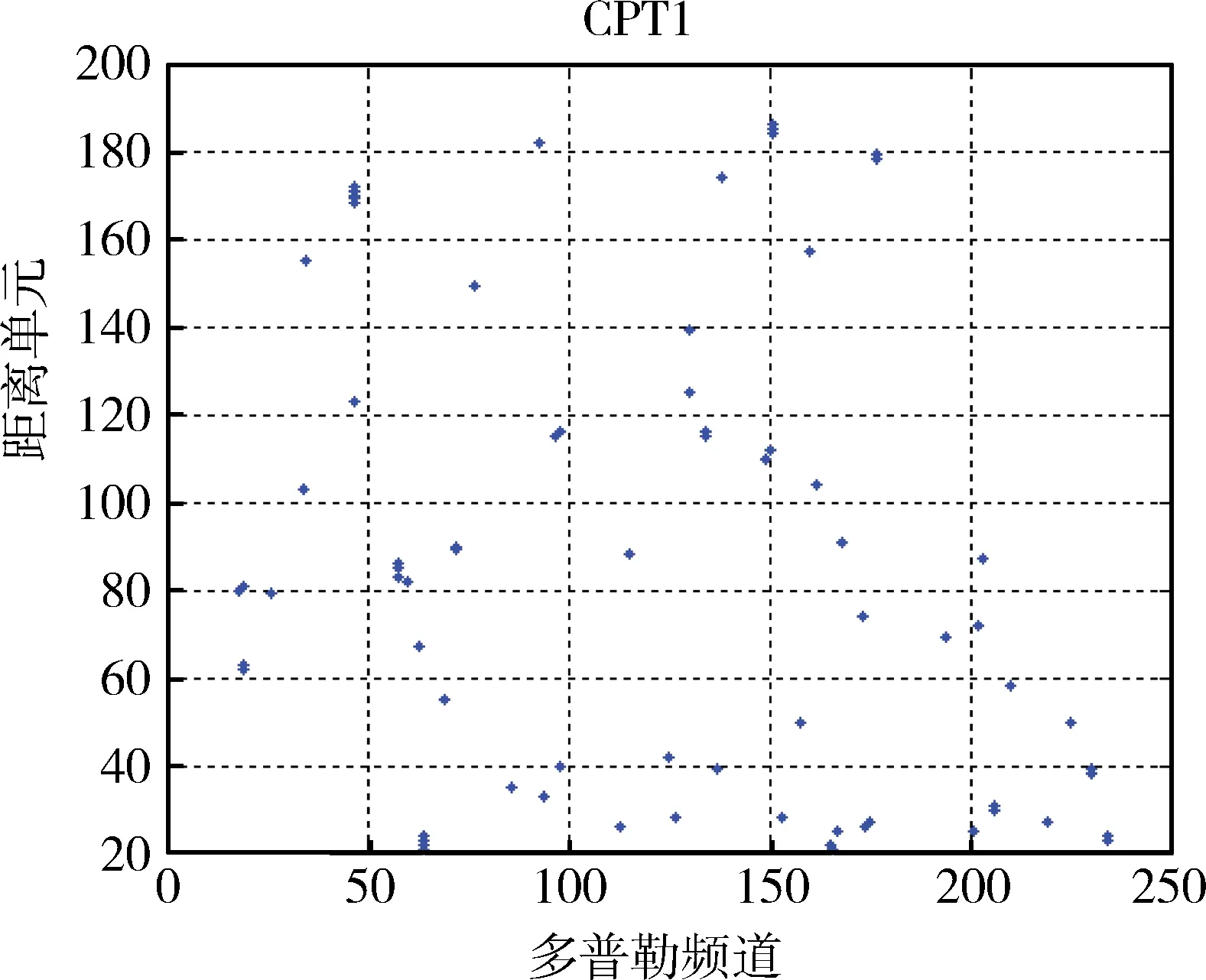
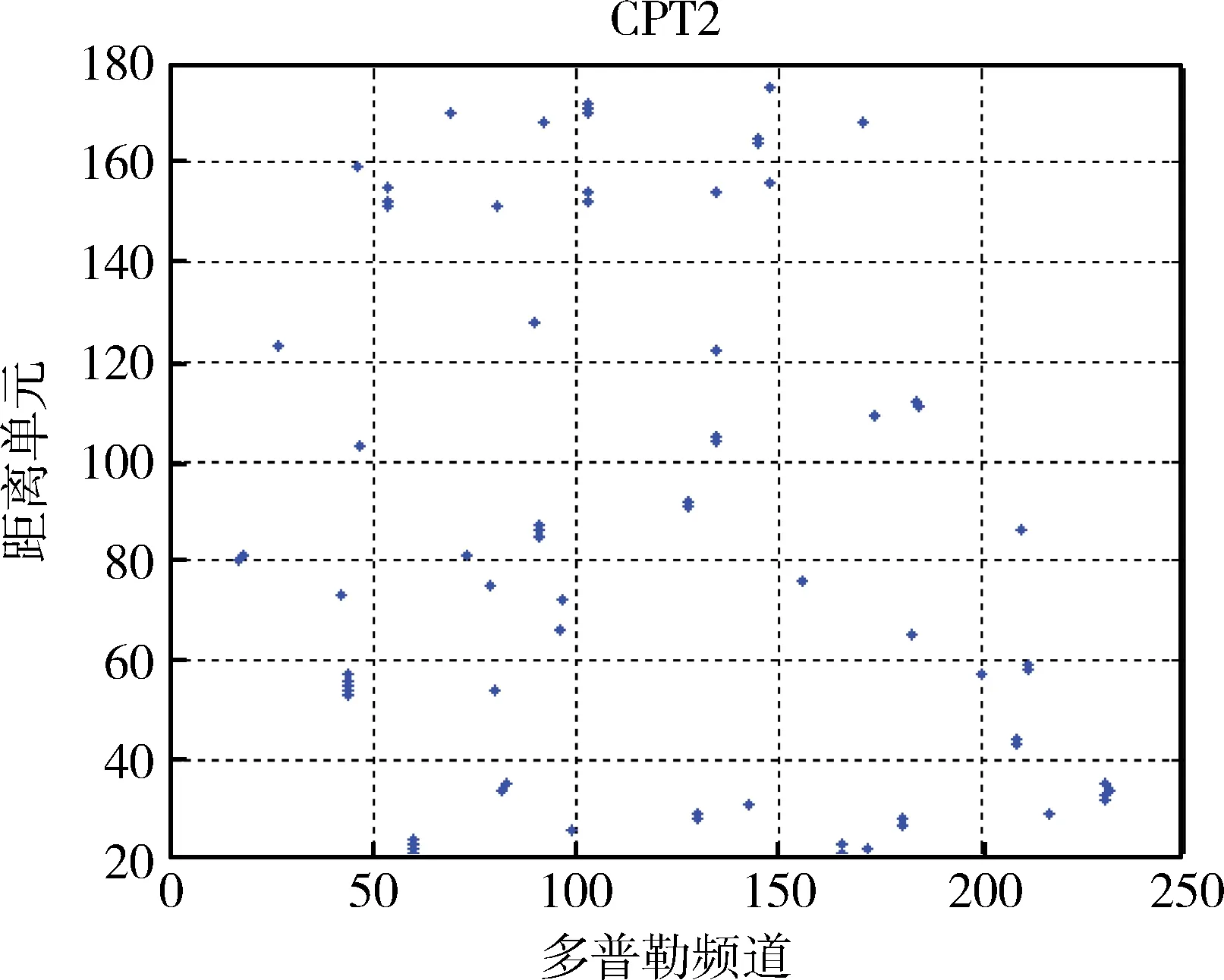
(5)如果i 表1 距离模糊余差表 图3 解距离模糊的流程图 根据各个CPI探测目标经恒虚警(CFAR)检测后的点迹原始信息,填写模糊距离表。如果满足解模糊准则,则输出目标点迹的幅度和频道信息;如果不满足解模糊准则,则判断是否解距离模糊结束。如果解距离模糊没有结束,则将距离单元加1重新解距离模糊。解距离模糊的工程实现流程如图3所示。 本文以3重CPI为例,采用2/3准则,PD雷达系统带宽为0.5 MHz,雷达探测最大距离单元数为6 000。利用本文提出的算法对雷达探测目标经CFAR检测后的回波进行解距离模糊,最后输出结果是以距离单元和多普勒频道来表示目标点迹信息。每个CPI在CFAR检测后的目标很多,且该目标包括很多噪声,解距离模糊后CPI1、CPI2和CPI3所探测的目标点迹分别如图4~图6所示。 通过仿真实验可知,图4~图6表示该算法的运算能力能够达到雷达信号处理在某一波位上实时处理能力的要求,保证解模糊结果具有很高准确性,可有效抑制虚警概率。 通过仿真实验可知,图4~图6表示该算法的运算能力能够达到雷达信号处理在某一波位上实时处理能力的要求,保证解模糊结果具有很高准确性,可有效抑制虚警概率。 图4 解距离模糊CPI的目标点迹 图5 解距离模糊后CPI2的目标点迹 本文提出一种针对PD雷达的基于快速余差查表法的解距离模糊算法,该算法关键就是建立余差距离表。以3重CPI为例,满足2/3准则,进行仿真实验。仿真实验结果表明,该算法可有效地降低解距离模糊的运算量,适应PD雷达信号处理对于实时性的要求,并且具有很高的解模糊准确率,能有效抑制虚假目标。 图6 解距离模糊后CPI3的目标点迹 [1] 贲德,韦传安,林幼权.机载雷达技术[M].北京:电子工业出版社,2006. [2] 曾涛,龙腾.一种脉冲多普勒雷达解模糊新算法[J].电子学报,2000,28(12):99-101. [3] 吴涛,屈强,袁嗣杰,等.一种低重频脉冲雷达速度模糊解算的新方法[J].系统仿真学报,2009,21(S2):31-33,42. [4] 洪一.脉冲多普勒雷达的速度模糊求解[J].现代科学与技术,1995(1):18-23. 德州仪器(TI)推出0.33英寸全高清DLP®Pico®芯片组,作为业内同类型产品中最小的1080p显示解决方案提供无可比拟的亮度性能 德州仪器(TI)近日发布了DLP Pico 0.33英寸全高清芯片组,以回应品牌及开发人员的期待——他们亟需一款能够集成1080p投影显示且外形尺寸更小的产品平台。该款业内最小的1080p显示解决方案包含DLP3310数字微镜器件(DMD)和DLPC3437控制器。通过采用久经验证的DLP MEMS技术,全新的DLP3310可以提供业内0.3英寸成像面板中最高的亮度性能。这款最新的DLP产品展现了TI对于更小外形尺寸、出色的图像质量和高系统效率方面的承诺,从而帮助客户设计和集成微型高清显示。如需了解更多信息,请访问www.ti.com/dlp3310。 凭借0.33英寸芯片组,开发人员可以创造出众多小巧紧凑、便携式的显示应用,诸如移动智能电视、内置电池微型投影仪、智能家居投影显示、数字标牌和工业解决方案。 0.33英寸全高清DLP Pico芯片组的关键特性和优势: ·业内最小且最亮的1080p解决方案:DMD的快速切换速度使得每个微镜在每一帧都能够在屏幕上显示两个完全不同且独立的像素。这款DLP解决方案不仅可以在屏幕上提供1080p分辨率,更带来业内同尺寸等级中最高的亮度性能,为紧凑型显示产品的开发人员提供强大的全新组合。 ·清晰锐利的图像和视频:久经验证的DLP技术提供高颜色保真(高达16M色),以实现鲜活灵动且色彩斑斓的图像。 ·功效:全新的DLP芯片组所具有的高功效满足了电池供电类设备对于显示功能日益升高的要求。 TI与业内最广泛的微型光引擎生产商伙伴合作,使得开发人员可以获取成熟的光学模组,进而加快产品开发进度并缩短客户创新产品的上市时间。 现在,包括深圳安华光电技术有限公司、中强光电股份有限公司、Digital Optics Co. Ltd, 迅达光电、扬明光学等在内的制造商正在计划基于DLP3310的光学模块的生产。 (TI公司供稿) Algorithms of range ambiguity resolution for pulse Doppler radar based on high speed residues′ difference look-up table Hong Xingyong (No.38 Research Institute,China Electronics Technology Group Corporation, Hefei 230031,China) Ambiguity resolution in range is one of the key technologies in medium-PRF PD radar. In this paper, a high speed residues’ difference look-up table algorithm is introduced to solve the range ambiguity problem of PD radar. The algorithm has low computation cost and high real-time processing ability. Three-CPI simulation experimental results show that the algorithm has advantages of low false probability and high accuracy in ambiguity resolution, and also can satisfy the demand of PD radar real-time signal processing. PD radar; ambiguity resolution in range; high speed ;residues’ difference look-up table algorithm TN957 A 10.19358/j.issn.1674- 7720.2017.04.025 洪兴勇.基于快速余差查表法的脉冲多普勒雷达解距离模糊算法[J].微型机与应用,2017,36(4):84-86. 2016-09-18) 洪兴勇(1978-),通信作者,男,博士,工程师,主要研究方向:信号处理,体系结构等。E-mail:hongxingyong38@163.com。
3 算法工程实现
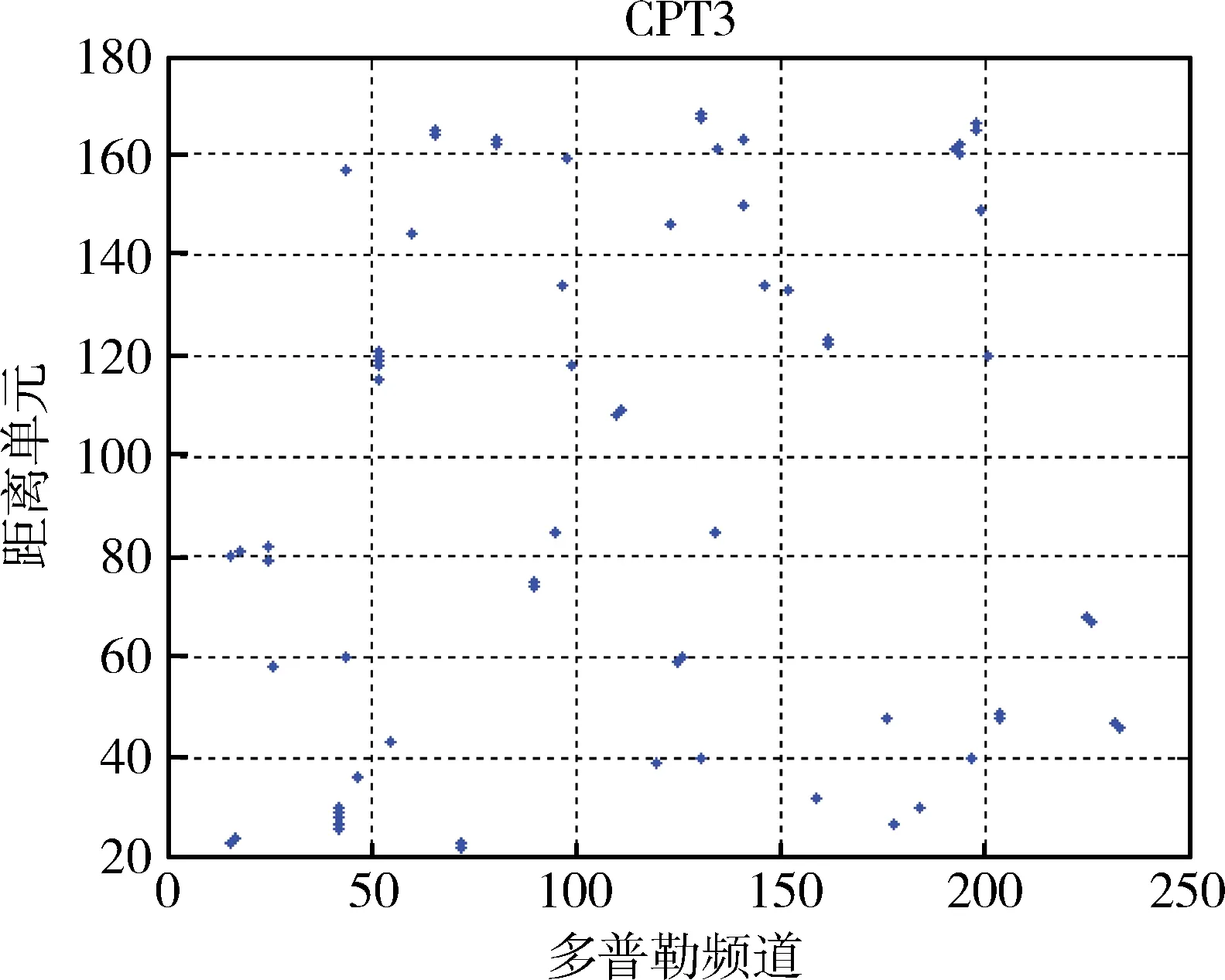
4 仿真实验
5 结论