农业机械导航技术发展分析
2017-03-09罗为林
罗为林
(衡南县农机化学校,湖南 衡南 430422)
现代农业智能化要求农业机械要具有导航技术,并且将这种农业机械导航技术应用到农业作业中去。使农业机械可以自动完成耕种作业、自主除草、施肥以及收割作业。要完成这些农业任务要求农业机械必须具有自主导航功能,即要求农业机械本身携带传感器,利用传感器感知周围作业环境,并通过对感知的信息加以分析处理,得到机械所处位置信息,然后决定出行进路径实行导航控制,以此来完成农业任务。在文章中,通过借鉴国内外经验、分析文献,综合阐述了在现代农业机械导航技术应用较多的GPS(卫星)导航与视觉导航两种方式。简单讲述了环境感知技术、智能控制系统、地图营造等关键技术,最后对农机技术发展作出展望。
1 农业机械导航技术的分类
(1)利用卫星的导航技术。卫星导航(Satellite navigation)是指采用导航卫星对陆地、大海、天空和空间用户进行导航定位的手段。人们经常使用的GPS导航,北斗星导航均为卫星导航。GPS定位系统是最早的导航技术。在现在农业机械作业中得到了广泛的应用:①运用到农机运输与农机具中,可以降低费用,提高作业效率;②在虫害杂草灾害中的应用。可精确定位灾害地点,精确投药,减少化学制剂的危害;③在无人拖拉机上的应用。节省人力、物力,缩短作业时间。GPS导航技术误差小,大约在3cm。随着对地球卫星装备的有效探索和利用,GPS的精度与传感速度等都得到了有效提升。人们利用GPS导航技术解决了插秧机、农药喷洒机、收割机等大型农机的导航问题。
(2)机械导航。在站立式的农场和耕地中,还能运用机械式导航方式对农场的耕种机械进行引导工作。对固定的引导目标或者是耕种车辆及机械进行控制操作时,发挥主要作用的就是机械导航里的传感型接收器,而使用这种导航方式的农场,主要是农林、果树或者葵花等高站立式农作物。我国在这个项目上,有一定的技术优势,并取得了非常瞩目的成绩和突破,通过为收割机安装导航指引设备,对农田、玉米等作业进行指引收割,大大提高了引导的精确度和控制力。
(3)视觉导航技术。在20世纪80年代初期,视觉导航指引技术在英国率先实验使用。视觉导航指引技术在农作物耕种领域有着非常广阔的使用前景,并且与卫星导航系统相比,它的价格更低,性价比更高。经过做对比试验,在相同的农作物耕种面积中,由传感器控制的视觉导航指引技术比卫星控制的导航技术更灵活,精准度和控制力也更胜一筹。
2 农业机械导航需要具备的关键技术
(1)环境感知技术。农机导航中使用的环境感知技术,主要指农业机械使用自带的传感器对外界的各种信息进行发现和捕捉,通过系统处理后得出有效运用处理方式的技术,如图1所示。环境感知技术的最终目的是计算机模拟出外界的环境,转化成信息进行处理的一种技术。通过该项技术,农业机械或者机器人实现进一步的路径规划和行为命令,因此感知精确度是机械操作精确度和自动化智能化程度的重要技术指标。近年来,电子信息工程在飞速发展,机器人对外界环境的分析已经升级到纳米级。因此相匹配的传感器、接收器和处理器都进入到相对稳定的层面。
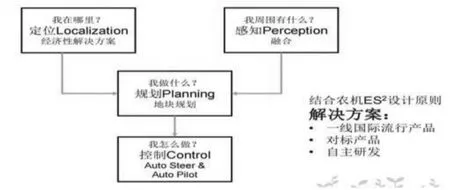
图1 环境感知控制技术
(2)智能控制系统。根据导航机械的作业环境,控制系统对农业机械技术的要求更为严格。智能控制系统主要分为横向和纵向控制两种。横向控制指的是对农业机械工作方式的控制,而很少使用导航技术。纵向控制是要借助导航技术来实现农业机械的路径规划、所在位置信息、工作范围和作业量的统计。因此,导航仪研发技术的高低就决定了纵向控制技术的高低。目前的农业机械在中国尤其是农业机械的导航飞行主要是GPS、RS、GIS系统、神经网络控制和模糊控制两种方式,这两种方式对线性驱动偏差率得到了有效控制,也使农业机械自动转向功能得以实现。
(3)地图构建技术。地图构建技术是指农业机械在捕捉到外界信息后,创造环境和模拟系统环境的技术能力。目前的农业机械能帮助小型视觉传感器、激光雷达、红外线和信息系统对水陆空三栖环境实现24小时加载信息。利用预设的数学模型,模拟出外界环境来制作信息地图,帮助农业机械来选择适和自己的导航模式。精确的仿真图能实现路径导航的自动化,地图建筑分为栅格地图、拓扑图和三维立体图,如丹麦罗维拉MAS应用三维地图帮助农业机械自动导航和避障前进,他使用技术结合二维栅格地图和GIS数据,检测在前面的物体,并自动判断。总之,导航设备的地图构建力越强,农业机械导航用途就越趋于精细化,行进路径就规划得越好。
3 农机自动导航技术发展的展望
(1)GNSS导航技术。全球导航卫星系统主要是通过与微型飞行器的实际位置的距离计算,并且距离通常是由无限电信号传输的时间来测量的。如图2所示,这对天线的位置也是接收天线的绝对地标,并通过接收机获得相关数据,相对位置是从同一组卫星观测得到的接收天线的位置使用2个以上或多个接收器。GNSS测量的误差主要是传播路径、卫星和接收机之间的误差,GNSS还可以实时定位农业机械的位置,提高原有的精度和速度。基于在农业机械上使用的GNSS数据,经过对中央控制器的处理,可以得到农业机械相应的准确度和方位。

图2 农机GNSS技术结构图
(2)障碍物探测及主动避障技术。耕地大多是空地,在经营范围内几乎没有障碍。因此,现有的农业机械自动导航系统不考虑障碍物检测和避障。司机应对紧急情况是必要的。农田可能出现的障碍主要是电杆(塔)、大树、人和其他农业机械。在规划时可以避免诸如杆、塔类和大树等静态障碍物,但考虑这些因素就增加了路径规划的难度。而人、其他农业机械等动态出现在农田中,只有在农业机械工作过程中实时检测,并采取必要措施避免障碍物。障碍物检测和主动避障是农业机械导航系统亟待解决的重要问题。
(3)农机物联网技术。物联网(IOT)是基于电子标签和电子编码并基于互联网而建立的实物互联网。现如今,随着农业智能化、精准农业的发展,物联网技术在现代农业中的应用越来越广泛,在农业环境监测,室内温度控制、气象监测、产品的安全性和可追溯性、设备管理、智能诊断等诸多方面取得了良好的应用。在农业机械自动导航、网络技术应用方面应该解决三个问题:一是独立的自动导航系统功能组件之间的车辆物联;二是多个农用机械之间的机器物联;三是农用机械与农业远程监控中心的连接。目前通用的车载物联主要采用基于ISO 11783协议标准的农业机械总线通信技术,并且农机群和远程材料结合无统一标准,如图3所示。
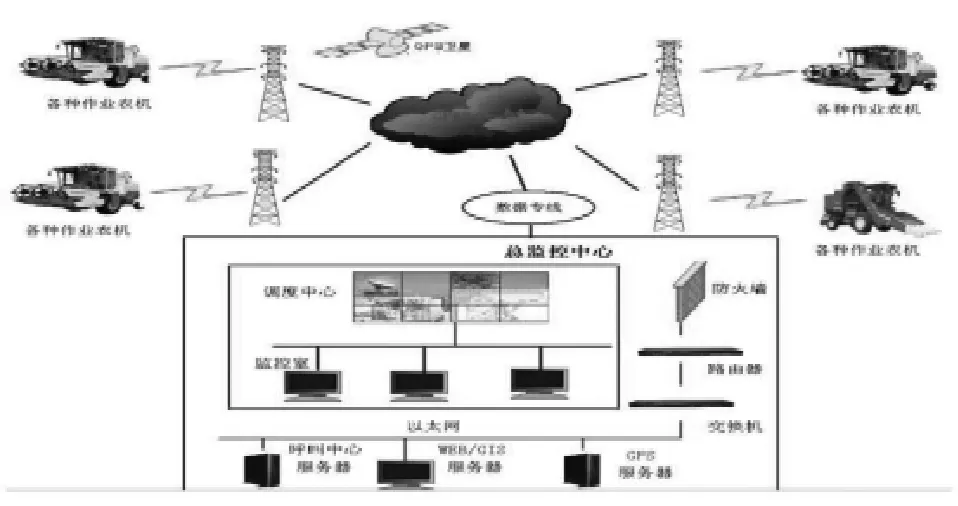
图3 多机互联控制系统
4 结语
随着农业现代化的不断发展,农业机械智能化程度和自动化程度将会越来越高。现代农业机械导航系统经过多年的发展正在慢慢地走向成熟,也在实践中取得了许多可喜成果。但是,随着社会的不断进步,人们对农业机械自动化和精细化的要求也越来越高。我国农业机械自动导航技术还存在各种各样的问题,需要进一步探索、研究并加以改进。在对农业机械导航技术进行分析研究的基础上,根据各种不同的实际情况,选择与当地农业条件相适应的农业机械,并利用农业机械的现代技术来完成各种农业任务。因地制宜,因时制宜,如此将会促进我国农业生产向着农业现代化、自动化迈进坚实的一步。
[1]杨茂林.农业机械自动导航技术研究研讨[J].黑龙江科技信息,2017,(12):21.
[2]易勤慧.农业机械中导航技术的应用探析[J].时代农机,2016,43(7):8+10.
[3]吕文刚,王耀申,丁保江.农业机械导航关键技术概述[J].农业装备与车辆工程,2016,54(8):86-88.
