基于探测空间的辅助泊车系统检测方法
2017-03-09崔晓川刘文营邹博维
崔晓川,刘文营,邹博维
(中国汽车技术研究中心,天津 300300)
基于探测空间的辅助泊车系统检测方法
崔晓川,刘文营,邹博维
(中国汽车技术研究中心,天津 300300)
该文提出一种基于探测静止车辆之间空隙作为目标停车位的辅助泊车系统的检测方法,旨在为评价该类型辅助泊车系统打下基础。辅助泊车系统检测方法的提出,有助于汽车检测领域能力的完善,规范系统生产商的设计,为消费者在购买汽车时提供技术支持。通过设计目标样车充气模型、搭建典型的垂直停车位和平行停车位作为实验目标场景,采用高精度惯性导航系统对试验中车辆的相互位置关系进行实时测量,最终利用实车系统验证该方法的可行性。经过大量实验验证及数据处理,结果表明:该方法能够对基于探测静止车辆之间空隙作为目标停车位的辅助泊车系统进行检测验证试验,适用于所有乘用车车型的检测,操作方便可行,结果便于评价。
汽车智能化;辅助泊车系统;探测空间;检测方法
0 引 言
随着科技的进步,汽车传感技术逐渐成熟,汽车消费者对汽车智能化也提出了更多的要求。辅助泊车系统是由非接触式传感器和相应的转向控制单元组成,系统激活后通过非接触传感器获取车辆周围的环境信息,实时规划停车路径并对车辆进行相应的侧向控制,辅助驾驶员泊车入位[1]。针对目前城市停车难、停车位狭小、新驾驶员数量增多的现实状况[2],辅助泊车系统的价值逐渐显现出来。随着辅助泊车系统性能的不断提升,新驾驶员停车入位的难度将不断降低,停车事故率降低,进而不断提升汽车的自动化与智能化,为智能汽车的实现打下基础[3-9]。
目前,中国汽车安全技术主要来源于世界著名品牌企业与各大零部件商所带来的成果。作为汽车安全技术的一个具体产物,辅助泊车系统的成熟产品也大部分是由博士、奥托立夫、德尔福等企业所研制开发。国内在该领域的研究起步较晚,但目前国内各大高校和高科技企业对辅助泊车系统的研究也取得了丰厚的成果[10]。至今辅助泊车技术已经基本成熟,产品的性能和稳定性已经达到了民用的程度,今后配有辅助泊车系统的商品车型将越来越多。但是,目前国内尚没有一个明确的检测方法对辅助泊车系统进行系统检定和评价,本文意在提出一种检测辅助泊车系统的方法,填补国内该领域检测方法的空白。
辅助泊车系统按探测原理可以分为两种:1)以探测静止车辆之间空隙作为目标停车位识别方式的系统;2)以探测喷涂在地面上的停车位线为识别目标的系统。针对识别停车位线的系统而言,系统只要辅助驾驶员将车辆停入规定停车位内即可,故系统可靠性比较容易判断。而针对探测静止车辆之间空隙作为目标停车位识别方式的系统,检测系统可靠性时容易造成车辆碰撞的危险,故本文提出一种基于探测空间的辅助泊车系统的检测方法,并通过实验验证该方法的可行性。该方法的提出有助于今后对该类系统进行直观有效的评价,对消费者起到相关的指导作用,同时也为今后的CNCAP扩充新领域新技术打下基础。
1 辅助泊车系统
1.1 辅助泊车系统原理
辅助泊车系统是一种能够快速、安全地使车辆自动驶入泊车位置的智能系统,它通过超声波雷达以及图像传感器识别停车位,生成相应的行车轨迹后控制车辆的方向盘转向进而实现泊车功能。其系统工作原理遵循下述车辆运动学模型[11-12]:

式中:θ——车轴与水平方向的夹角;
V——车辆的运动速度;
L——轴距;
ω——车辆前轮与车轴的夹角;
x——后轴中心点横坐标;
y——后轴中心点纵坐标。
1.2 基于探测空间的辅助泊车系统工作流程
基于探测空间的辅助泊车系统工作前需要驾驶员手动选择停车位的方式:平行停车位或者垂直停车位。辅助泊车系统激活以后车辆以较低的速度直线行驶,此时非接触式测距传感器探测车辆周围的环境信息,系统通过探测到的位置信息判断是否有合适的空间能够作为停车位进行泊车入位,在探测出停车位后,系统提示驾驶员找到合适的停车位,驾驶员将车辆停下并按交互界面提示的档位进行换挡操作,辅助泊车系统根据车辆与静止车辆的位置关系以及探测出来的空间停车位的大小自动规划泊车路径轨迹,在泊车入位过程中,系统控制车辆的转向机构并在必要时给驾驶员提示信息,停车操作完成后,系统将提示驾驶员泊车操作已结束。此类辅助泊车系统在工作的过程中,驾驶员需要对车辆的速度以及档位的选择进行控制,当车速超过系统设定阈值或者车辆与静止车辆或障碍物距离小于系统设定阈值时,辅助泊车功能自动退出,将驾驶权转交给驾驶员。系统的工作示意图如图1所示。

图1 基于探测空间的辅助泊车系统工作示意图
1.3 基于探测空间的辅助泊车系统提示信息要求
基于上述系统工作原理及工作流程可知探测空间的辅助泊车系统属于人机交互的智能系统,故检测该类型系统时,需要查看系统是否给驾驶员必要的操作提示,此提示可以是声信号也可以是光信号。本文提出的基于探测空间的辅助泊车系统检测方法中作为最低的要求,系统在释放自动转向、完成辅助泊车或者辅助泊车过程中系统中断泊车操作时,应该向驾驶员发出必要的声信号。其次在发现合适空间可以作为停车位、提示驾驶员换挡或者在泊车过程中发现障碍物时可以给驾驶员必要的声或者光信号。
2 实验场景搭建
目前标准的停车位有两种:平行停车位、垂直停车位。基于探测空间的辅助泊车系统应该能够探测上述两种类型停车位。由于基于探测空间的辅助泊车系统需要探测静止车辆之间的空隙作为停车位,一旦系统失效,摆放实车搭建实验场景会造成碰撞的危险。故需要设计假车模型代替实车搭建平行停车位和垂直停车位实验场景。
设计两辆充气假车模型,分别模拟三厢乘用车和两厢乘用车。三厢乘用车模型尺寸:4.2m×1.5m× 1.11m;两厢乘用车模型尺寸:3.905m×1.6m×1.27m。两辆假车模型内部用充气柱做支撑,外部车衣采用坚固结实的蒙皮制成,其雷达反射特性与真实车辆基本一致。充气假车模型实物图如图2所示。实验前需利用气泵将其充气,实验完毕后放气,折叠整理后便于搬运,易于多次反复实验。

图2 充气假车模型实物图
2.1 平行停车位实验场景
平行停车位区域是受两辆静止车辆和一个可选择的侧向路边作为主要限制,两辆静止车辆在同一方向平行于正常行驶路线整齐摆放而形成的停车位空间。此类停车位区域长度x设定为被测车辆长度加上Δx(被测车辆长度小于4m时,Δx取1m;被测车辆长度大于6m时,Δx取1.5m;被测车辆长度介于4m和6m之间时,Δx取被测车辆长度×0.25),宽度设定为被测车辆宽度加上0.2m。有侧向路边的场景下,静止车辆以一个固定的距离平行于路边摆放;没有侧向路边的场景下,两辆静止车辆侧向外边界的连接线在地面上的投影作为实际的参考线。平行停车位实验场景示意图如图3所示。

图3 平行停车位实验场景示意图
2.2 垂直停车位实验场景
垂直停车位区域是受两辆静止车辆在同一方向垂直于正常行驶路线整齐摆放而形成的停车位空间。此类停车位区域宽度设定为被测车辆宽度加上1.2m,深度设定为被测车辆的长度。垂直停车位实验场景示意图如图4所示。

图4 垂直停车位实验场景示意图
3 系统性能要求及检测方法
3.1 系统性能要求
不同零部件生产商针对基于探测空间的辅助泊车系统的设计参数均不同,但是应该设定一个最低的系统性能要求,便于汽车消费者对该辅助泊车系统有一个共性的认识。本文介绍的检测方法对此类辅助泊车系统提出一个最低的性能要求,用以检验测量时的一般性检查。系统说明书中应明确说明车辆搜索停车位时的速度阈值(针对平行停车位此速度阈值设定为不大于30km/h,针对垂直停车位此速度阈值设定为不大于20 km/h),搜索停车位时应该以直线行驶路径进行搜索,被测车辆与静止车辆的横向净距离(不考虑后视镜)设定为0.5~1.5m,被测车辆中分面与静止车辆边界线的最大角度设定为5°。停车过程中车速应小于设定的速度阈值(该阈值应设为5~12km/h),一旦速度超过该速度阈值后,辅助泊车功能将自动终止退出。
3.2 平行停车位系统检测方法
利用设计的充气假车模型,搭建平行停车位场景,按照被测车辆附带的系统说明书操作被测的辅助泊车系统,选择平行停车位模式进行辅助泊车系统检测。在搜索车位、发现车位、辅助泊车过程及辅助泊车结束或者遇到错误终止各个阶段应该有相应的提示信息,至少满足本文1.3所述的最低要求。在辅助泊车整个过程中对辅助泊车系统进行一般检查,系统应该满足本文3.1所述的系统性能的最低要求。
辅助泊车结束后,应对车辆位置进行测量。被测车辆前轮和后轮最外侧分别与侧向路边的距离应该在0.05~0.3m之间;对于没有侧向路边的场景,被测车辆前轮和后轮最外侧分别与两辆静止车辆侧向外边界的连接线在地面上的投影的距离应该在±0.3m之间(负值代表静止车辆内侧方向,正值代表静止车辆外侧方向);被测车辆中分面与侧向路边或者两辆静止车辆侧向外边界的连接线在地面上的投影所成的夹角应该在±3°之间(正值代表逆时针夹角,负值代表顺时针夹角)。实验场景图如图5所示。

图5 平行停车位系统检测方法实验场景图
进行10次实验有9次满足上述所有条件的辅助泊车系统可以判定为针对平行停车位场景而言合格的基于探测空间的辅助泊车系统。
3.3 垂直停车位系统检测方法
利用设计的充气假车模型,搭建垂直停车位场景,按照被测车辆附带的系统说明书操作被测的辅助泊车系统,选择垂直停车位模式进行辅助泊车系统检测。在搜索车位、发现车位、辅助泊车过程及辅助泊车结束或者遇到错误终止各个阶段应该有相应的提示信息,至少满足本文1.3所述的最低要求。在辅助泊车整个过程中对辅助泊车系统进行一般检查,系统应该满足本文3.1所述的系统性能的最低要求。
辅助泊车结束后,应对车辆位置进行测量。定义一个符合的泊车停止区域,其形状为一个矩形,具体定义如下:直线1为平行于左侧静止车辆右边界线(不包括后视镜)距离0.3m的一条直线;直线2为平行于右侧静止车辆左边界线(不包括后视镜)距离0.3m;直线3和直线4分别平行于两静止车辆前后边界线距离0.4m。上述4条直线所围成的区域即为定义的符合辅助泊车系统完成泊车后的停止区域,示意图如图6所示。辅助泊车结束后,被测车辆应停在上述区域内,并且被测车辆中分面与该区域所成的夹角应在±3°之间。

图6 垂直停车位场景下辅助泊车停止区域示意图
进行10次实验有9次满足上述所有条件的辅助泊车系统可以判定为针对垂直停车位场景而言合格的基于探测空间的辅助泊车系统。
4 实验验证
按照本文所述的两种实验场景(平行停车位和垂直停车位)分别进行实车实验,记录每次实验后被测车辆前轮和后轮与基准线的距离以及被测车辆中分面与规定区域的夹角。共进行3种场景的实验:1)有侧向路边的平行停车位场景;2)没有侧向路边的平行停车位场景;3)垂直停车位场景。实验数据如表1~表3所示。
通过表1结果可以看出,除了第7次实验中车辆右前轮距离侧向路边0.35 m,超出0.30 m的合格范围外,其余所有实验中车轮距侧向路边的距离均在0.05~0.30m之间,车身中线与侧向路边的夹角也均在±3°之间。10次实验其中9次符合要求,可判定为满足要求。
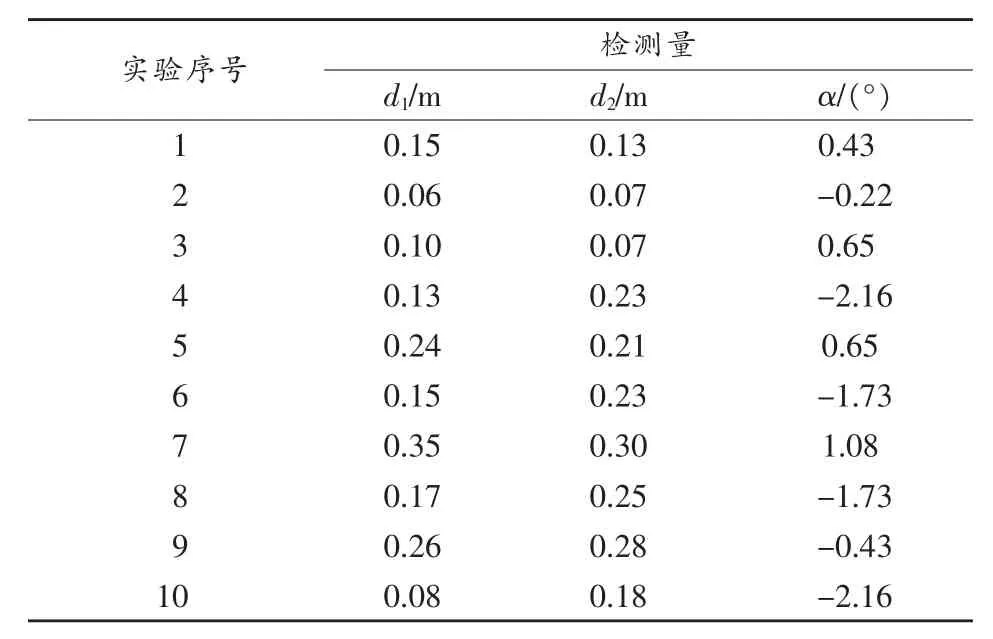
表1 有侧向路边的平行停车位场景实验结果1)

表2 没有侧向路边的平行停车位场景实验结果1)
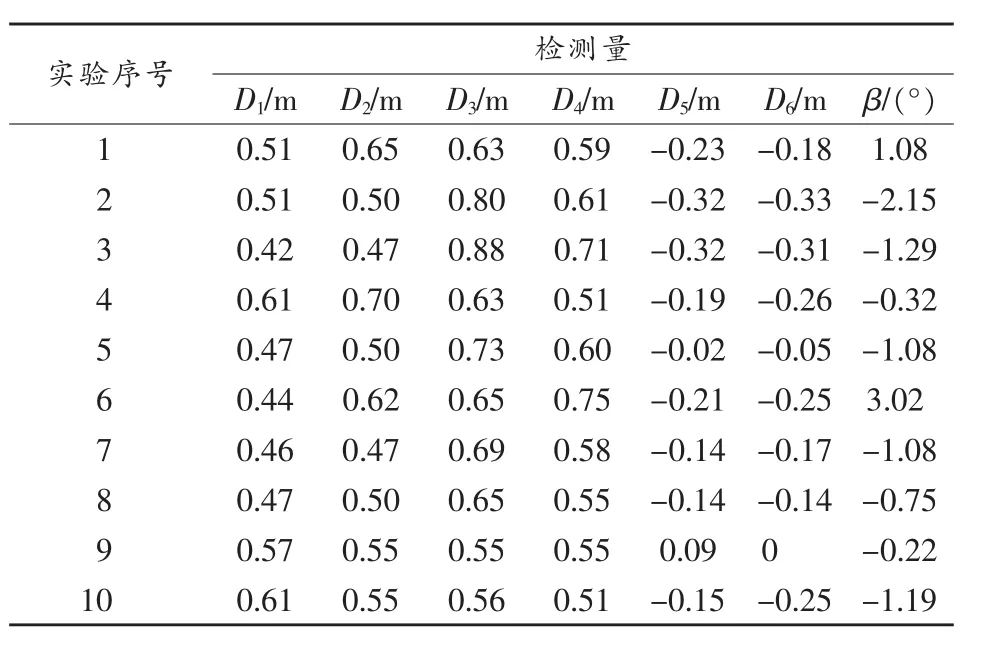
表3 垂直停车位场景实验结果1)
通过表2结果可以看出,所有实验中车轮距两辆静止车辆侧向外边界的连接线在地面上的投影的距离均在±0.30m之间,车身中线与两辆静止车辆侧向外边界的连接线在地面上的投影的夹角也均在±3°之间。10次实验均符合要求,可判定为满足要求。
通过表3结果可以看出,除了第6次实验中车辆中分面与规定停车区域的夹角>3°,超出范围外,其余所有实验中前车轮距两侧静止车辆均>0.3 m,后车轮距两侧静止车辆均>0.4m,车辆中分面与规定停车区域的夹角均在±3°之间。10次实验其中9次符合要求,可判定为满足要求。
5 结束语
本文在研究辅助泊车系统的工作原理的基础上提出了一种基于探测空间的辅助泊车系统的检测方法。通过设计充气假车模型建立平行停车位和垂直停车位两种典型的实验停车位场景,利用高精度惯性导航测量系统对试验中车辆的位置信息进行实时测量,最终采集车辆停止后与目标的距离信息及角度信息。经过大量的实车验证实验表明:该检测方法方便可行,便于评价,对不同供应商提供的辅助泊车系统均可适用。本文提出的基于探测空间的辅助泊车系统的检测方法填补了目前国内对辅助泊车系统检测方法的空白,为今后智能汽车的检测检验标准的提出打下基础。
[1]剧季,陈淑荣,孟飞.自动平行泊车技术综述[J].湖北工程学院学报,2016,36(3):46-50.
[2]王芳成.自动平行泊车系统的研究[D].合肥:中国科学技术大学,2010.
[3]吴锴.智能自动泊车系统研究[D].南京:南京理工大学,2008.
[4]奚碧清.汽车安全综合评价模型研究[D].成都:西南交通大学,2014.
[5]禄盛,黄显杭,苏岭,等.自动泊车系统模型研究与实车验证[J].重庆邮电大学学报(自然科学版),2014,26(4):522-529.
[6]宋健,王伟玮,李亮,等.汽车安全技术的研究现状和展望[J].汽车安全与节能学报,2010,1(2):98-106.
[7]华一丁,江浩斌,马世典,等.基于语音提示的辅助泊车系统控制器设计与试验[J].汽车技术,2014(4):38-42.
[8]刘广君.智能后视辅助泊车系统研究与设计[J].科技创新导报,2013(8):15-17.
[9]毕雁冰,唐婷婷.基于多传感器信息融合的辅助泊车系统[J].四川兵工学报,2011,32(1):110-140.
[10]赵福全,吴成明,潘之杰,等.中国汽车安全技术的现状与展望[J].汽车安全与节能学报,2011,2(2):111-121.
[11]孟繁微.车辆垂直泊车转向控制算法研究[D].长春:吉林大学,2011.
[12]熊剑,余恭敏,郭杭,等.四轮车辆导航中的惯性/运动学模型组合方法[J].计算机仿真,2014,31(3):188-192.
(编辑:刘杨)
Detection method for auxiliary parking system based on detecting space
CUI Xiaochuan,LIU Wenying,ZOU Bowei
(China Automotive Technology&Research Center,Tianjin 300300,China)
Currently,there is no inspection and test method for auxiliary parking system in China. In this paper,a detection method of auxiliary parking system is proposed to detect the space between the stationary vehicles with the aim to lay a foundation for this type of auxiliary parking system.The proposed method will improve the test ability in automobile detection field,specify the design of the system manufacturers and provide technical support for consumers when purchasing vehicles.By designing inflatable model for sample vehicle and build classic vertical parking space and parallel parking space as the test target scene,real-time measurement can be carried out for the mutual position relation of testing vehicles based on high-precision inertial navigation system. Finally,the feasibility of the method is verified via real vehicle system.Based on extensive test verification and data processing,this method is capable of detecting,verifying and measuring the space between stationary vehicles for auxiliary parking system of target parking space.The test results show that the method is suitable for the detection of all passenger vehicle models,and the test is feasible and convenient for operation.Test results are easy to be evaluated.
automobile intellectualization;auxiliary parking system;detecting space;detecting method
A
:1674-5124(2017)02-0029-05
10.11857/j.issn.1674-5124.2017.02.006
2016-07-29;
:2016-09-03
崔晓川(1987-),男,天津市人,工程师,研究方向为整车性能、道路试验、车辆主动安全与被动安全。
