基于车辆行驶轨迹特征的驾驶人疲劳状态识别技术研究
2017-03-09石晓玲杨英仓
石晓玲+杨英仓
【摘要】 疲劳驾驶是引发交通事故的重要因素之一。设计了利用车辆行驶轨迹进行驾驶人疲劳状态判识的方案,基于车辆在车道线中的位置数据,建立了基于平均偏离程度和航向角标准差进行疲劳状态判识的模型,并应用实际道路的实验数据对该模型进行了验证。
【关键词】 驾驶疲劳 车辆轨迹 机器视觉
Driver Drowsiness Detection Based on Vehicle Track SHI Xiaoling,YANG Yingcang(Guizhou Province Engineering Research Center for Traffic Accidents Responsibility Verification, Guiyang, 550005, China)
Abstract: Driver drowsiness is a major cause of road accidents. This paper puts forward a method of driver drowsiness detection which based on vehicle track. The Classification model which consists of deviation mean and standard deviation of steering angle is built as well.
Keywords: driver drowsiness, vehicle track, machine vision
一、引言
疲劳驾驶是当今交通安全的重要隐患之一。驾驶人在疲劳时,其对周围环境的感知能力、形势识别判断能力和对车辆的操控能力都有不同程度的下降,因此很容易发生交通事故。统计数据表明,在2004年至2006年,我国因疲劳驾驶直接导致的死亡人数占全国机动车驾驶人交通肇事总死亡人数的比例分别为3.27%、2.81%和2.5%[1-3],大约每年有3000人死于疲劳驾驶。另外,世界各发达国家也正在积极开展驾驶人疲劳状态监控技术的研究,如欧洲的AWAKE项目、美国的SAVE-IT项目、日本的ASV项目等。研究结果表明,通过对对驾驶人的状态进行监测并及时向驾驶人提示相关信息,可大幅度减少交通事故的发生。
驾驶人的状态必然会反映到其驾驶行为特性,本文通过对驾驶人在清醒和疲劳状态下行驶轨迹的研究,建立了基于行驶轨迹的疲劳判别模型,通过轨迹特征反演驾驶人的当前状态。该技术主要包括三个环节:车道线的识别、车辆在当前车道中位置的解算、利用建立的模型对驾驶人的状态进行判识。
对于车辆在车道中位置的识别技术,Mobileye公司的LDW(车道偏离预警)装置目前已产品化,2007年德国宝马公司宣布在新5系中全球第一个采用该产品。我国在该方面也进行了一些有益的探索[5],但在应用车辆行驶轨迹特征对驾驶人疲劳状态识别方面,国内外未见相关资料。通过本技术的研究,可以为驾驶人疲劳状态识别提供一种新的技术途径,有效减少交通事故的发生,产生重大的社会、经济效益。
二、总体设计方案
该系统总统方案如图1所示,来自CCD摄像头的视频信号依次经过滤波去噪、边缘增强、二值化处理后,进行车道线的检测和识别,并获取图像中左右车道线的方程。然后由图像坐标系向世界坐标系进行映射,进行道路重建,得到在世界坐标系中车道线方程,在世界坐标系中将车辆在车道线中的位置解算出来。建立基于车辆轨迹特性的驾驶人疲劳状态判识模型,根据车辆在车道线中的位置数据,对驾驶人的疲劳状态进行判识。关于车道线的识别和车辆在车道线中位置的解算,目前已有许多较好的模型[4]-[5],本文仅就基于车辆轨迹对驾驶人疲劳状态的判别进行讨论。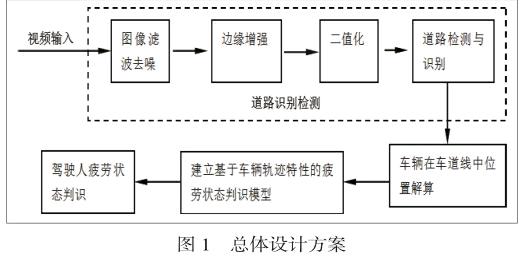
三、 基于轨迹特征的状态判识模型的建立及实验结果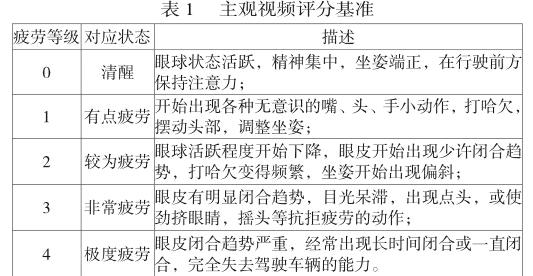
该判识模型以对驾驶人疲劳状态的主观视频评分作为基准。主观视频评分的实施方法如下:第一步,驾驶人进行一段长时间的驾驶,在该驾驶过程中,要保证出现疲劳状态。在行驶过程中,采用两个CCD分別对驾驶人的面部图像和车道线图像进行实时采集,所得的两段视频作为原始实验数据;第二步,将驾驶人的面部视频进行视频分割,分割成一系列长度为0.5分钟的片段;第三步,让三名视频打分人员分别对每一个视频片断进行打分,打分参考标准如表1所示;第四步,对三名打分人员的打分结果进行平均,作为该时间片内驾驶人的疲劳等级。该疲劳等级就作为我们基于轨迹特征进行疲劳状态判识的依据和基准。
下面就以2008年6月在京沈高速进行实验采到的数据进行分析。本文将以该次实验中11:40~12:00时间段的实验数据为例进行分析。11:40~12:00时间段驾驶人疲劳状态的主观视频评分结果如图2所示,从图中可以看出,在该时间段,驾驶人的疲劳状态变化比较明显。在该时间段内共有27000个采样点,每个采样点上包括车辆偏离车道中线的距离和车辆航向角两个数据,为数据处理方便,截取2000~6000数据区间的4000个采样点作为清醒状态的分析数据,23000~27000区间的4000个采样点作为疲劳阶段的分析数据。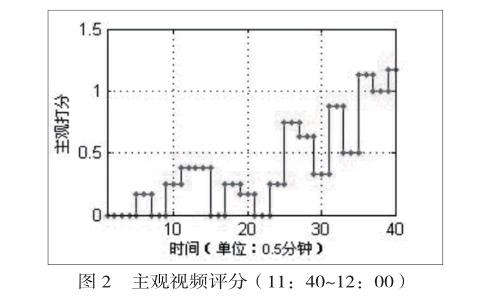
建立疲劳判断模型如下:该疲劳模型对驾驶人疲劳状态的判断基于如下两个假设:
1、如图3所示,B点为车辆当前所在的位置,A点为车辆30s前所在的位置。车辆在从A点到达B点的过程中,其行驶轨迹的均值偏离车道中线的大小反映了驾驶人的疲劳程度;
2、在从A点到达B点的过程中,航向角的标准差反映了驾驶人的操作的积极性,若标准差很小,则表征驾驶人对车辆的控制消极,依此来判断驾驶人的疲劳状态。
将这两个条件融合,作为一个综合指标来判断驾驶人的疲劳状态。
对2000~6000数据区间的4000个采样点,作出车辆偏离车道中线的曲线,如图4所示,正值表示车辆在车道线中线右侧,负值表示车辆在车道线中线左侧。作出车辆偏航角曲线,如图5所示。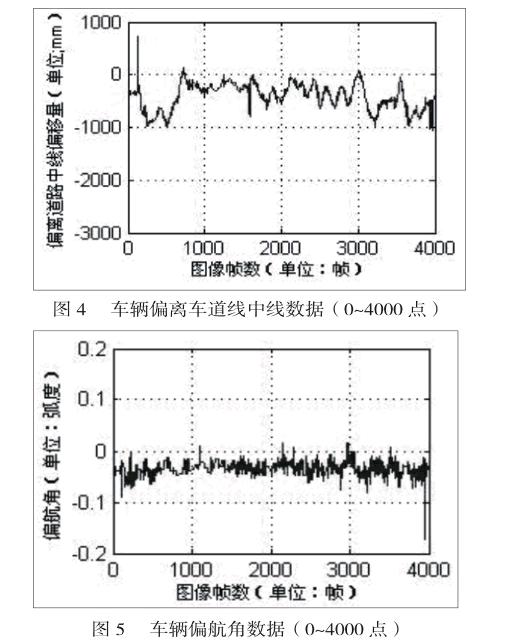
计算出各个时间片(30s)内车辆偏离车道中线的偏移量,如表2所示。
同理,作出23000~27000区间4000个采样点车辆偏离车道中线的曲线,如图6所示,作出车辆偏航角曲线,如图7所示。
計算出各个时间片(30s)内车辆偏离车道中线的偏移量,如表3所示。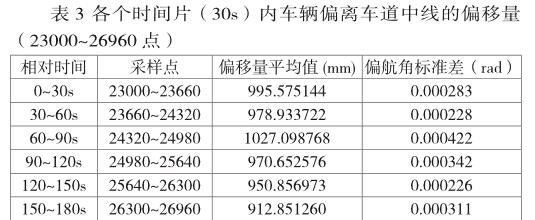
为便于比较,将清醒状态和疲劳状态下偏移量的平均值画到同一个图中,如图8所示,将清醒状态和疲劳状态下偏航角的标准差画到同一个图中,如图9所示。
由图可以看出,在30s时间窗内平均偏离程度和偏航角标准差两个指标能够较好的反应两个指标能够较好的区分清醒与疲劳两种状态可以用来作为疲劳状态的判断基准。
四、 结论
本文基于车辆行驶轨迹数据建立了基于平均偏离程度和航向角标准差进行疲劳状态判识的方法。实验表明,所提取的指标能够较好的区分清醒与疲劳状态。但是,也应看到,本文所建立的数学模型比较粗糙,尚未对车辆换线这种有意识的车道偏离作进一步的处理,同时,该模型的判识结果只能定位到是否疲劳,而不能根据疲劳程度将其细分成较为疲劳、严重疲劳等。另外,驾驶人的操作除了与疲劳状态有关外,还受到个人习惯、行驶速度、道路环境、操作技能的影响,车辆的行驶状态也与车辆特性、道路等很多环境因素有关。因此,在下一步的研究中如果能针对这些问题进行深入分析,可望得到可靠性、鲁棒性更好的结果。
参 考 文 献
[1] 2004年全国道路交通事故情况,道路交通管理,2005(1):4-7
[2] 2005年全国道路交通事故概况,道路交通管理,2006(1):4-5
[3] 2006年全国道路交通事故情况,道路交通管理,2007(2):22-23
[4] 李兵,张朋飞,何克忠. 基于增强转移网络(ATN)的室外移动机器人道理图像理解. 中国图象图形学报, 9(3): 380-384, 2004.
[5] 余天洪. 基于机器视觉的车道偏离预警系统研究[D].吉林:吉林大学,2006年