基于伺服控制的精确定位物料装箱系统
2017-03-04楼蔚松
楼蔚松


摘要:在分析伺服控制器特点的基础上,设计了一套机械手精确工位物料装箱系统。该系统通过PLC精确计算来确定夹取点位,并实现了自动取货控制与手动取货控制两种操作模式。系统性能稳定、定位精度高。
关键词:精确定位;伺服控制;机械手
中图分类号:TP3 文献标识码:A
1引言
随着电机控制系统的不断发展,传统的电机拖动系统不断的被更新和改造。伺服电机控制系统由于可靠性高、控制精确、设计方便等优点,在自动化设备中应用越来越广泛。伺服驱动器结合PLC控制系统。可以直接对伺服电机进行位置和速度控制双闭环控制,无需增加定位模块,节约成本。在很多实际系统中需要对物料的位置进行精确定位。所以设计完成一套能进行精确定位的物料装箱系统就显得非常有实用意义。
2 分拣系统的组成
本文设计的物料装箱系统共有3个取货工位。抓取机械手在直线导轨上左右来回运动,到各指定工位抓取物料,然后送入指定位置进行装箱。机械手抓取货物的工作模式有手动、自动两种模式。在手动模式下,需在上位机系统中人工指定抓取工位,机械手执行指令进行抓取和送货入库工作。在自动模式下,可以自动检测工位上是否有物料,如有物料则在系统启动的状态下,机械手直接完成取货和送货入库的工作。系统采用电感式接近开关作为原点检测传感器,直线导轨两端各装有一个左、右极限开关。极限开关采用有触点的微动开关,用来提供越程故障时的保护信号:当滑动溜板在运动中越过左或右极限位置时,极限开关会动作,从而向系统发出越程故障信号。物料检测采用OMRON 公司的CX-441型放大器内置型光电开关。控制系统采用三菱FX3U-48M型PLC,伺服驱动器采用松下MADDT1207003全数字交流永磁同步伺服驱动器,伺服电机采用也采用松下MHMD022P1U永磁同步交流伺服电机。
3 硬件系统实现
3.1伺服系统设计
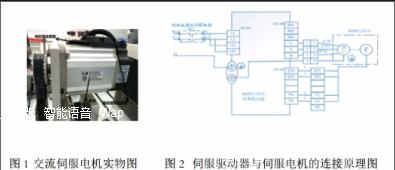
伺服电机内部的转子是永磁铁,驱动器控制的 U/V/W 三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服控制系统可以进行速度闭环控制与位置闭环控制。当伺服系统用作定位控制时,位置指令输入到位置控制器,速度控制器输入端前面的电子开关切换到位置控制器输出端,同样,电流控制器输入端前面的电子开关切換到速度控制器输出端。因此,位置控制模式下的伺服系统是一个三闭环控制系统,两个内环分别是电流环和速度环。由自动控制理论可知,这样的系统结构提高了系统的快速性、稳定性和抗干扰能力。在足够高的开环增益下,系统的稳态误差接近为零。在本系统中,采用了松下MHMD022P1U永磁同步交流伺服电机,及 MADDT1207003全数字交流永磁同步伺服驱动装置作为运输机械手的运动控制装置。伺服电机实物如图1所示。
MADDT1207003型伺服驱动器面板上有多个接线端口,伺服控制的精确工位物料装箱系统的主电路接线只使用电源接口XA、电机连接接口XB、编码器连接器X6。控制电路的接线均在I\O控制信号端口X4上完成。MINAS A5系列伺服系统有位置控制、速度控制和转矩控制,以及全闭环控制等控制模式。本系统采用位置控制模式,并根据设备工作要求,只使用了部分端子,它们分别是:脉冲驱动信号输入端(OPC1、PULS2、OPC2、SING2)。越程故障信号输入端:正方向越程(9脚,POT),负方向越程(8脚,NOT)。伺服ON输入(29脚,SRV-ON)。伺服报警输出(37脚,ALM+端;36脚,ALM-端)。
伺服驱动器要完成工作必须要进行相应的参数设置才能正确工作。MADDT1207003 伺服驱动器的参数共有 128 个。可以在控制面板中直接进行设置。但是在很多情况下可以使用缺省设置。本系统中主要需修改的参数设置如下表所示。
3.2 气动机械手装置
本系统使用的机械手抓取装置主要有底部滑轨、气动摆台、上下升降台和气动手抓组成。在气动控制回路中,驱动摆动气缸和气动手抓气缸的电磁阀采用的是二位五通双电控电磁阀。
左右旋转台的主要器件是气动摆台,它是由直线气缸驱动齿轮齿条实现回转运动,回转角度能在0-90度和0-180度之间任意可调,而且可以安装磁性开关,检旋转到位信号。薄型气缸用于驱动整个机械手的提升与下降。气爪使用的是滑动导轨型气动手指。
4 PLC控制系统设计
本系统运行的目标是将三个物料站的物料依次夹取到工作台上,实行精确放置,具体操作流程如下:
系统通电之后,执行复位操作,使抓取机械手装置回到原点位置。然后进行手动、自动切换选择;
自动模式,按下启动按钮SB1,系统启动,在各物料站有料的情况下开始工作,否则停止不动,这时HL1启动指示灯亮;当完成4个工件的精确夹取之后,系统停止运行,需重新按按钮SB1启动,继续工作;
手动模式,按下启动按钮SB1,系统启动,再按一号物料站启动按钮SB3,则进行一号物料站工件的夹取,在完成4个工件后,系统停止运行,其他两站操作如同一号站。
5 结束语
伺服控制系统由于其能实现精确定位、控制系统简单等特点,在现代控制系统中有着广泛的应用。本系统所设计的精确定位取货装箱系统很好体现了这些优点。并在实际应用中得到了验证。对其他类似需精确定位的控制系统设计有很好的借鉴作用。
参考文献
[1]李红萍.工控组态技术及应用--MCGS[M].西安电子科技大学出版社,2013,11.
[2]张同苏.自动化生产线安装与调试实训和备赛指导,2015,5.
[3]廖常初.PLC基础及应用[M].北京机械工业出版社,2007,7.
[4]王成福,黄敏,张小杭.电器及PLC控制技术[M].浙江大学出版社,2008,3.
