基于相机阵列的车辆尺寸测量系统设计
2017-03-01浙江金融职业学院
浙江金融职业学院 刘 斯
杭州电子科技大学 孙 茜 方回归
基于相机阵列的车辆尺寸测量系统设计
浙江金融职业学院 刘 斯
杭州电子科技大学 孙 茜 方回归
本文提出一种基于相机阵列的车辆尺寸测量方案。该系统以双面相机为基础,在车辆周围布置丰富的相机阵列,每个相机与相邻其他相机组成多个双目相机,根据双目立体视觉原理和特征匹配原理恢复三维空间尺度,从而实现对车辆尺寸的测量。详细阐述系统相机标定、测量布局、相机阵列等误差。对该车辆几何尺寸测量系统的研究表明:用4台相机组成两个双目测量单元,在距离相机2m深度范围内的视场内,两台相机的尺寸测量误差小于2mm,完全可以达到相关政策对车辆尺寸所要求的精度。
照相机阵列;车辆尺寸;立体视觉;特征提取
0 引言
车辆几何尺寸参数的检测是运行安全检测的重要内容之一,国家标准《机动车运行安全技术条件》和《汽车外廓尺寸界限》中对车辆尺寸参数均做出了明确规定。
目前,传统方法都是用钢卷尺等长度测量工具和离地间隙仪、角度仪进行手工测量汽车的尺寸参数。人工手动接触性测量的消耗时间长、测量精度受操作员主管因素影响,并强大劳动强度容易出现人为偏差,已不适应于现代社会发展的需要。
本项目采用多组双目立体相机对,利用双目立体视觉原理恢复特征点的三维空间坐标,有对应点的坐标运算可以得到车辆尺寸参数。高精度CCD可以实现非接触测量,测量方案具有通用性等特点。
1 测量方案
如图1所示,在车辆周围布置18台相机,其中部分为照相机,剩下的是照相机,合理布置相机的位置使视区内的任一特征点至少被两台相机测得。每两台相机构成一对双目立体,与此同时每个相机还可与周边其他相机构成多对双目立体。根据双目立体视觉和特征匹配原理可以恢复特征点的三维空间坐标,坐标运算后可以得到车辆各部尺寸。各相机位置相对固定在栏杆上,相机的内参数和外参数经过标定后,可以实现在线测量。

图1 相机布局结构示意图
整套测量系统除相机外,计算机为系统的核心,控制相机的运作、图像数据的处理和信号的指示;钢轨测量平台为待测车辆提供水平支承,为标定工作铺垫;相机支架及固定装置,用来安装相机;辅助光源可以提高摄像图片质量。
根据图2所要求的尺寸,提出具体测量方案如下:
总长L:由4、5号相机测得车辆的最前端特征点,由17、18号相机测得汽车最后端特征点。最前端坐标减去最后端坐标得到总长。
总宽W:由6、9号相机测量车辆左侧突出部位的特征点,由3、7号相机测量车辆右侧突出部位的最外侧点。左侧坐标减去右侧坐标得到总宽。
总高H:由1、2号相机测量汽车顶部,对比数据最大值为总高。
轮距W1:由7,8,9号相机测量两前轮,由15、16号相机测得两后轮。测量得到的前后轮论据值可能略有不同。
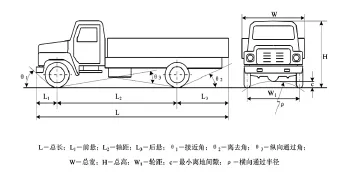
图2 汽车主要尺寸
实际测量软件算法中,由于特征点不够明显需要对车体的局部进行曲线或曲面的拟和,这样才能精确搜寻到测量点。车辆纵向对称平面是基准平面,需要把所有测量特征点的三维坐标投影到纵向对称平面中去计算。整套系统是自行上下测量平台,若车身相对坐标系有偏转,则必须计算车辆纵向对称平面的位置。
2 系统构建
相机选用Canon Power Shot,320万像素(2048×1536)。为获得大视场相机的焦距为最小值f=5mm,此时在距相机1.5m处视场可见范围约为1.5m×1.1m;启用自动快门可以获得最适当的曝光量;同时关闭自动对焦,可以避免镜头有效焦距的轻微变动;光圈设为最小值F8.0,可以获得大景深。相机参数的配置是由计算机软件控制实现的,无需人为配置。
在车辆周围布置丰富的相机时,还需要考虑到车辆尺寸参数的特点以及各种车型的长宽比不同,避免由于车体部件遮挡而造成特征点未进入相机视场,或特征点难以识别。
3 系统误差
3.1 镜头畸变
实际情况下,透镜成像系统不严格满足中心投影关系,即产生了镜头畸变,线性模型不能准确的描述成像的几何关系。当相机镜头是广角镜头时,在远离图像中心处会产生较大的畸变。因此在测量中应采用非线性模型利用计算机的运算能力实时修正成像几何关系。
3.2 成像几何畸变
实际的成像系统即使经过严格的标定任然存在着几何畸变,包括径向畸变、离心畸变、薄棱镜畸变等。成像系统不能使图像与实际景物在整个视场严格满足线性关系,造成像点、光心和物点在同一条直线上的前提假设不再成立。因此在标定过程中中必须采用非线性模型来对摄像系统进行标定。
3.3 标定误差
双目标定一个基本测量单元的两台相机后,即可建立一个局部测量坐标系,包括图像坐标系、世界坐标系等。但整个相机阵列要实现最后的高精度测量,全局标定的必不可少而且精度必须达到所要求指标。把所有测量单元的局部坐标系统一到相同的基准坐标系中的全部标定过程必须在系统搭建完成后的现场进行。最后软件上将每个测量单元的测量结果通过标定关系式变换到基准坐标系中进行尺寸计算。
4 结语
本文从理论上对相机阵列在车辆尺寸测量中的应用进行了一定的研究和分析。在对系统原理进行分析的基础上,将扫描时得到的汽车各部分图像(边界处须有部分重叠)进行无缝拼接,可以得到汽车的正视图和侧视图数据。本文介绍的车辆尺寸测量方法具有非接触测量、精度高等的特点,与传统方法相比具有较大的优越性,有望在未来获得广泛应用。
[1]闵新力,朱训生,万德安.应用CMM实现非接触视觉测量的改造[J].机械研究与应用,2003,16(1):23-25.
[2]周维虎.大尺寸空间坐标测量系统精度理论若干问题的研究[D][博士学位论文].合肥:合肥工业大学精密仪器及机械专业,2000:9-13.
[3]荣烈润.三坐标测量机的现状和发展动向[J].机电一体化,2001(6): 8-11.
[4]中国汽车技术研究中心标准化研究所.汽车标准汇编[S].长春:中国汽车技术研究中心汽车标准化研究所出版,2000.
[5]曾令云,王焕然,李庆.汽车焊接车体尺寸精度控制[J].电焊机,2001,31(4):28-29.