基于红外传感器智能小车的设计
2017-03-01中国矿业大学徐州卜文东马草原白耀武孙荣琛
中国矿业大学(徐州) 卜文东 华 凯 马草原 白耀武 孙荣琛
基于红外传感器智能小车的设计
中国矿业大学(徐州) 卜文东 华 凯 马草原 白耀武 孙荣琛
介绍了一种基于红外传感器,智能循迹等功能的智能小车系统的设计;该智能小车的设计采用的是四轮结构(两个驱动前轮,两个万象后轮),以L293为电机驱动,STC89C52单片机为整个系统的控制核心。在设计中,按控制要求给智能小车安装传感器并编程,使智能小车实现自动避障与智能循迹等功能;通过红外激光传感器探测路径,快速准确地采集路径信息,使小车沿着黑线自动识别方向并且行驶。
循迹;STC89C52;红外传感
0 引言
智能小车技术可以应用于生活中的方方面面,如在人类无法工作的地方,科学勘探,工厂中的生产线,物流仓库和服务机器人等很多的领域。在所有的东西都追求智能化的时候,智能技术就显得尤为重要,智能技术正逐步渗入到工业和社会的各个方面。
随着科学技术的进步,智能小车飞速发展,从生活中的智能玩具到航天航空行业等其他各个行业都有涉及,并已经基本实现了循迹、检测贴片和避障等一些基本功能。目前国际上一些汽车巨头公司已形成了智能汽车研究和开发热潮,未来对汽车的概念将会发生根本性的变化。智能小车作为现代的新发明,它可以按照预先的控制模式进行操作,实现智能化不需要人为的管理,是以后发展的方向。基于对人工智能控制技术、传感器与检测技术、模式识别技术等学科的掌握,针对全国电子大赛中智能小车控制方面的题目,设计了一种基于红外传感器,智能循迹等功能的智能小车系统的设计,提高自我的自主创新能力和编程技巧。
1 总体设计方案
智能小车的的系统组成简单明白,主要由STC89C52单片机做为主控电路,通过红外发射接收管判断黑线路径。L293D驱动模块驱动电机。
1.1 系统基本组成
智能循迹小车主要由STC89C52单片机电路、L293D驱动模块、红外发射接收管直、流电机、小车底板、电源模块、底板、轮胎等组成。
(1)单片机电路:采用STC89C52芯片作为控制单元。STC宏晶科技对8051单片机进行了全面的技术升级与创新,全面采用Flash技术和ISP/IAP技术。针对抗干扰进行了专门的设计。超强抗干扰,进行了特别的加密技术,对传统的8051进行了全面的提速,大幅度提高了集成度。
(2) 红外线光电传感器,采用CC4069六反向器中的两个与非门组成的多谐振荡器,其振荡频率调整在38~40KHZ,经过驱动,红外发射管发出38~40KHZ的红外光线。
(3)L293驱动模块:体积小、控制方便。内部电路属于H桥集成电路。输出电流1000mA,最高2A。最高工作电压36V,其输入端可以与单片机连接,可以控制两路电机,实现正反转。
(4)直流电机:只要提供一定的直流电源就能转动。(5)电源模块:由4个串联1.5V干电池作为电源。
1.2 系统基本原理
2 单片机电路设计
2.1 最小系统功能特性
采用STC89C52芯片作为控制单元。STC89C52具有超强抗干扰能力,在传统的8051的基础上进行了全面的提速,指令速度提高了有24倍,通过单片机专用的串行编程接口和STC提供的专串口下载器固化程序软件,对单片机内部的Flash进行编程。时钟电路采用的频率是12MHZ的石英晶振。在复位电路中当RES为低电平时。系统处于工作状态,当REST为 高电平时,系统处于复位或下载程序状态,在程序下载过程中,REST引脚被拉高,下载完毕后自动拉低进入运行状态,可以通过按下S17进行手动复位。
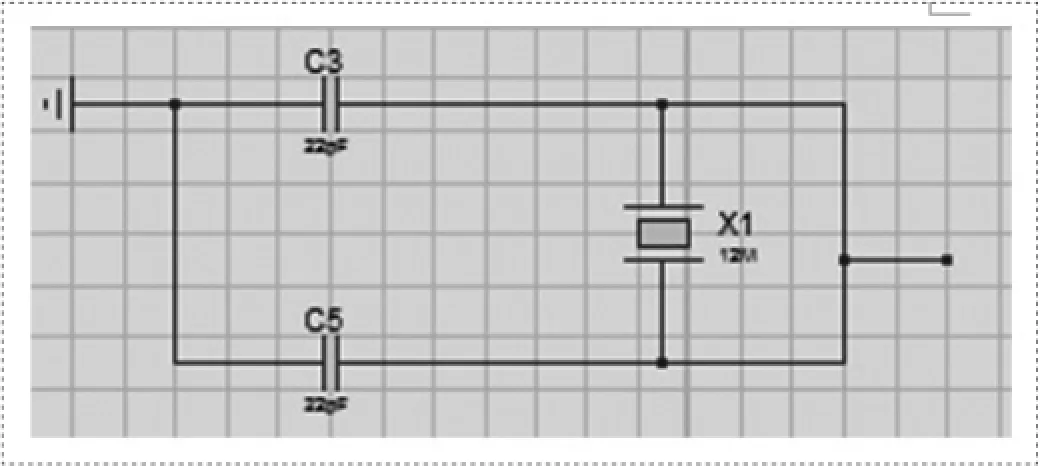
2.2 晶振电路
每个单片机系统里都有晶体震荡器,它结合单片机内部的电路,产生单片机所必须的时钟频率,晶振提供的时钟频率越高,单片机的运行速度也就越快。时钟可以由内外部的方式产生,在XTAL1和XTAL2引脚上外接定时元件,内部振荡器就产生自激振荡。定时元件通常采用石英晶体和电容组成的并联谐振回路,本设计选用的是12MHZ无源晶振、2个22pF电容。
2.3 复位电路
为确保系统中电路稳定可靠的工作,复位电路的作用尤为关键。同时,由于复位电路容易受到外部噪声干扰的原因,复位电路必须具有一定的抗干扰能力。在上电或复位过程中,控制CPU的复位状态:这段时间内保持复位状态,以避免一上电或刚复位完毕就工作,让CPU发出错误的指令、执行错误操作。施密特触发电路有两个临界电压且形成一个滞后区,可以防止在滞后范围内之噪声干扰电路的正常工作。当系统处于正常工作状态时,且振荡器稳定后,如果RST引脚上有一个高电平并维持2个机器周期(24个振荡周期)以上,则CPU就可以响应并将系统复位。

3 红外传感器
红外辐射是一种电磁辐射,它既具有与可见光相似的特性,如反射、折射、干涉、衍射和偏振,又具有粒子性,即他可以以光量子的形式被发射和吸收。这在电子对生产、康普顿散射、光电效应等实验中得到充分的证明。
红外探测器是把红外辐射能转换为电能或其他便于测量的物理量的器件。最初赫歇尔发现红外辐射所用的水银温度计是最早的热辐射探测器。
用来检测红外辐射存在的物理器件称为红外探测器,能把接收到的红外辐射转变为容易测量的物理量。在小车的设计过程中利用了红外辐射的反射特性。当红外发射管发射红外线被黑色的跑道吸收,不能反射红外线,接收管接收不到红外线,L293D向直流电机持续供电,实现循迹。
4 电机驱动原理
4.1 电机驱动原理
L293D四倍高电流 H 桥驱动程序。L293D提供双向驱动电流高达600毫安,电压是从 4.5 V至36V的。
兼容所有的TTL输入。每个输出都是推拉式驱动电路,与达林顿三极管和伪达林源。启用1,2EN驱动器和3,4EN驱动器。当使能输入为高电平时,相关联的驱动器被启用和他们的输出处于活动状态。
其输出关闭,在高阻抗状态。用适当的数据输入端,每对驱动程序的形式一个完整的H桥可逆驱动器适用于电磁阀或电机应用。L293D的工作温度是从0°C至70°C。
4.2 原理图
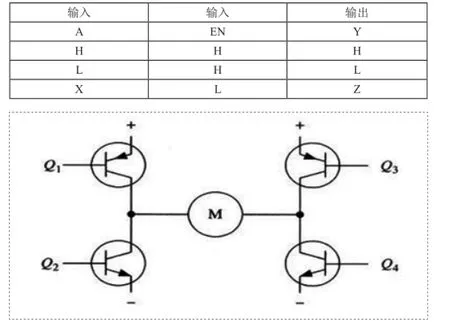
如图所示,H桥电机驱动的电路中包含四个三极管和一个电机。电机在运转的时候,必须要导通对角线上的一对三极管。根据不同的三极管对的导通情况可以控制电机的转向,电流可以从左至右流过电机,当Q1管和Q4导通,电流从电源正极经过Q1从左至右流过电机,在经过Q4回到电源负极。这种的电流流向驱动电机顺时针转动。
5 软件设计
程序的采用C语言来编写,利用模块化结构程序的设计,便于编写和查找问题,同时能更方便的让读者理解和阅读。模块化的程序主要包括:主程序、定时溢出中断服务程序,外部中断服务程序。
C语言是一种通用的计算机语言,可以用来编写一般的应用程序也可以用来编写计算机的系统程序。C语言既具有一般高级语言的特点,又能直接对计算机的硬件进行操作。表达和运算的能力也比较强。德国的Keil Software公司一直致力于单片机C语言编译器的研究。该公司的Keil C51是一种转为8051单片机设计的高效率C语言编译器,符合ANSi标准。生成的代码运行的速度也很高。
Keil公司已经推出了V9.0以上的版本,为8051的开发环境提供了更好的平台,同时还具有汇编代码高效、快速的特点。C51 已经被完全集成到一个功能强大且全新的开发环境。
uVision4具备很强大的项目管理功能,可以十分方便的进行结构化多模块程序设计。

6 结论
通过本次的设计以及制作,基于模块化设计的红外自动循迹智能小车控制系统,设计的系统具有很强的灵活性和扩展性。以STC89C52单片机作为主控系统进行控制处理,控制发射管进行发射红外光,控制接收管处理反射回来的红外线。经过设计和制作小车可以在黑色跑道上快速较准确的自动行驶,具有较快调节时间和反应时间,扛干扰性强、等特点。
[1]郭天祥.51单片机C语言教程[M].电子工业出版社,2009.
[2]党宏社.智能车辆系统发展及其关键技术概述[J].公路交通科技,2002(4):6-10.
[3]尹念东.智能车辆的研究及前景[J].上海汽车,2002(2):11-15.
[4]张毅刚.新编MCS-51单片机应用设计(第一版)[M].哈尔滨:哈尔滨工业大学出版社,2003:45-60.
[5]何立民.单片机应用系统设计[M].北京:航天航空大学出版社,2002:2-5.
[6]袁秀英,李珍.单片机原理与实验教程[M].北京:航空航天大学出版社,2006:56-78.
[7]蔡自兴编著.中国的智能循迹小车研究[J].莆田学院学报,2002,9(3):36-39.
[8]恒盛杰资讯编著.Protel电路板设计从入门到精通(第1版)[M].中国青年出版社,2006:1-148.
[9]徐爱钧著.Keil C51单片机高级语言应用编程技术[J].北京:电子工业出版社,2015,10.
[10]王海宴编著.红外辐射及应用[M].西安:西安电子科技大学出版社,2014,8.
[11]张建奇,方小平编著.西安:西安电子科技大学出版社,2004,6.
[12]何宾编著.STC单片机原理及应用:从器件、汇编、C到操作系统的分析和设计[M].北京:清华大学出版社,2015.

附图1:

附图2:
附图3: