基于Buck电路的双闭环控制系统设计的仿真研究
2017-03-01北方工业大学高本友张卫平张晓强
北方工业大学 高本友 张卫平 张晓强
基于Buck电路的双闭环控制系统设计的仿真研究
北方工业大学 高本友 张卫平 张晓强
为保证DC/DC变换器输出稳定电压并具有较快的响应速度,需要对DC/DC变换器进行建模,由于DC/DC变换器具有非线性、时变等特点,为此本文通过基本建模法对系统进行交流小信号分析,用该方法获得控制对象的传递函数,并利用补偿网络形成电压电流双闭环控制系统,通过MATLAB对控制方法进行仿真,验证补偿网络参数设计的可行性。
变换器;建模;交流小信号
0 引言
开关电源具有体积小、效率高、稳定性好等特点,并广泛应用于计算机通讯设备、工业自动化控制以及仪器仪表等场合。DC/DC变换器是开关电源的核心,为此需要对DC/DC变换器进行建模与分析。目前DC/DC变换器的基本结构有Buck、Boost、Buck-Boost以及Cuk电路等[1],本文选用Buck作为系统的主电路拓扑,并采用基本建模法对系统电路进行小信号分析,求出控制对象的传递函数,在此基础上利用补偿网络对控制对象进行补偿,形成电压电流双闭环控制,使系统能稳定输出可靠电压,保证系统具有较快的响应速度。本文选择连续模式下的Buck作为主电路进行分析,并通过MATLAB对控制系统进行仿真,验证电压电流双闭环控制参数设计的可行性。
1 设计步骤
(1)对Buck电路的控制对象进行建模。
(2)设计电压电流双闭环控制的补偿网络。
1)画出控制对象的Bode图,并根据Bode,判别曲线是否符合期望曲线:低频段增益充分大;中频段对数幅值曲线斜率一般为-20dB/dec,并占据一定宽度,保证合适的相角裕度;高频段增益最高为-40dB/dec,以减少噪音对系统的影响。
2)若不符合期望曲线,选择合适的零、极点参数,对控制对象进行补偿,使其曲线满足期望曲线。
3)选择合适的截止频率,并将其代入被控对象的开环传递函数中,计算比例系数。
2 Buck电路的建模
Buck电路是非隔离型变换器的一种基本电路,它是将输入的高电压经过功率开关管的导通和截止得到负载所需的低电压,其结构拓扑如图1所示。

图1 Buck电路结构拓扑
2.1 求取平均量
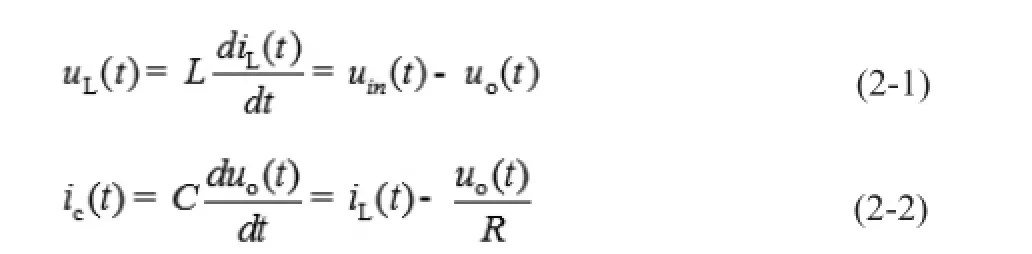
工作状态1:如图1所示,当功率开关管V导通,二极管D截至时,即在开关周期(0,dTs)时间内,电感电压uL(t)和电容电流ic(t)分别是:
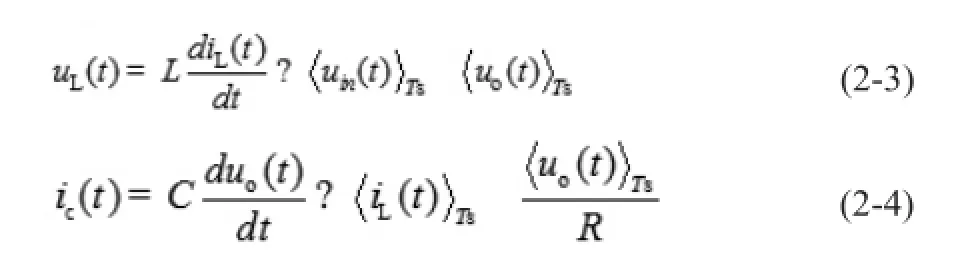
假设交流小信号的频率和变换器的转折频率要远远小于开关频率,为此可将式(2-1)和式(2-2)中分别用<uin(t)>Ts、<uo(t)>Ts近似代替uin(t)、uo(t),即:
若小信号的变化周期远远小于开关周期,在一个开关周期内,电路中的低频小信号所引起的输入量和状态量变化很小,为简化分析,可将<uin(t)>Ts、<uo(t)>Ts近似为恒定值,这样电感电压和电容电流在开关周期(0,dTs)时间内可近似为线性规律变化。
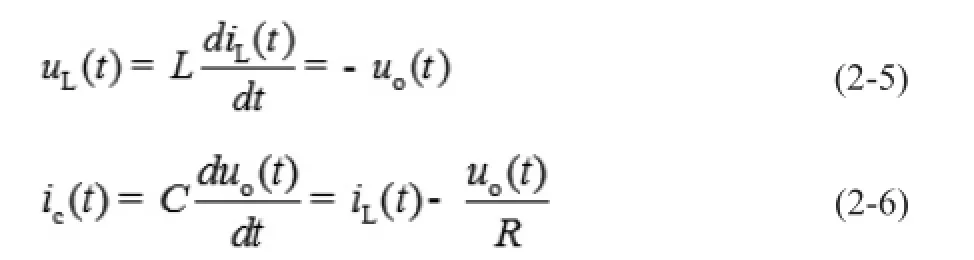
工作状态2:当功率开关管V截至,二极管D导通时,即在开关周期(dTs,Ts)时间内,电感电压uL(t)和电容电流ic(t)分别是:
假设交流小信号的频率和变换器的转折频率要远远小于开关频率,为此可将式(2-5)和式(2-6)分别用<uo(t)>Ts、<iL(t)>Ts近似代替uo(t)、iL(t),即:
同理可将<uo(t)>Ts、<iL(t)>Ts近似为恒定值,这样电感电压和电容电流在开关周期(dTs,Ts)时间内可近似为线性规律变化。
根据式(2-3)和式(2-7)可进一步推导电感电压在一个开关周期(0,Ts)内的平均值,即:
若<uo(t)>Ts、<iL(t)>Ts近似为恒定值,则根据式(2-9)得:

同理电容电流在一个开关周期(0,Ts)内为:

2.2 分离扰动
设DC/DC变换器中变量为x(t),其平均变量为<x(t)>Ts,将平均变量分解为直流分量X和交流小信号分量,即:

其中x可取uin、uo、iL、ic、d等变量。
为保证在静态工作点附近对Buck的线性处理不会引起误差,需要交流小信号远远小于直流分量X。
将式(2-13)代入式(2-10)和式(2-12)中得:

根据式(2-14)可得到直流分量:

根据式(2-14)可得到交流小信号分量:

忽略二次项,并对交流小信号进行拉氏变换得:

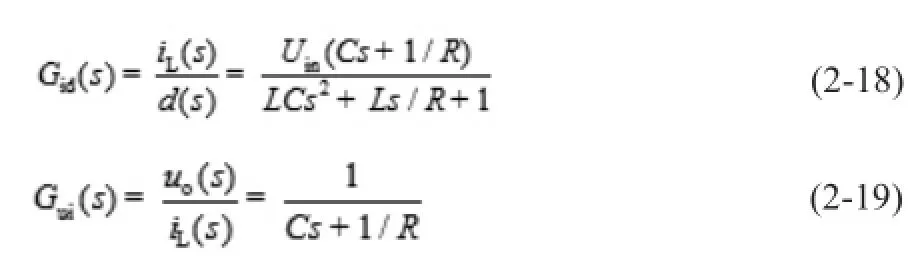
经整理可得到连续模式下的传递函数:
3 Buck电路双闭环设计及仿真
主电路基本参数:输入电压为18V;输出电压为12V;PWM开关频率fs为20kHz,其幅值Upwm=1,电感为2.5mH,电容为10uF,输出电阻为5.2Ω。设计双闭环时通常先设计内外,在设计外环。
3.1 电流内环设计

图2 电流内环控制框图
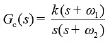
图2所示为电流内环控制框图,其中电流内环控制对象传函如式(2-18),其bode图如图3所示,该幅频曲线低频段斜率为0,系统增益较小,为此系统存在静态误差,高频段斜率为-20dB/dec,无法抑制噪声。为保证得到期望的Bode图,设补偿网络的传递函数为:
电流环开环的传递函数为:

PWM的传递函数为:

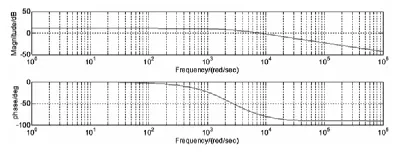
图3 电流环被控对象的Bode图
根据电流环的开环函数,依照采样频率的经验规则[2]:ws=(6~10)wc和仿真调整可选择截至频率wc,为保证输出稳定电流,需要电流环的开环传递函数的频率特性形状为[3]:低频段增益充分大(即低频斜率最高为-20dB/dec);中频段对数幅值曲线斜率一般为-20dB/dec,并占据一定宽度,保证合适的相角裕度;高频段增益最高为-40dB/dec,以减少噪音对系统的影响。
图3所示为电流环控制对象Gid(s)的bode图,该幅频曲线低频段斜率为0,系统增益较小,为此系统存在静态误差,高频段斜率为-20dB/dec,无法抑制噪声,而图4所示加入补偿网络后开环控制对象Gcop(s)不仅满足在低频段斜率为-20dB/dec,消除稳态误差,在中频段对应的相角裕度与图3所示的相角裕度减少一些,但并没有较大影响系统的动态特性,而高频段斜率为-40dB/dec,能有效抑制噪声的干扰。

图4 电流环开环控制对象的Bode图
3.2 电压外环设计
设电流环闭环传递函数为Gcclose(s),若电流环输出电流iL跟踪参考电流iref,则Gcclose(s)=1,此时电压外环控制框图如图5所示。
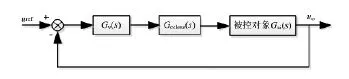
图5 电压外环控制框图
由式(2-19)得到电压外环控制对象传递函数,为保证系统有较快响应速度,电流内环的截至频率一般为电压环的10倍左右,为此可适当选择电压外环截止频率,此时设计思路和电流环设计一样,这里不再阐述。
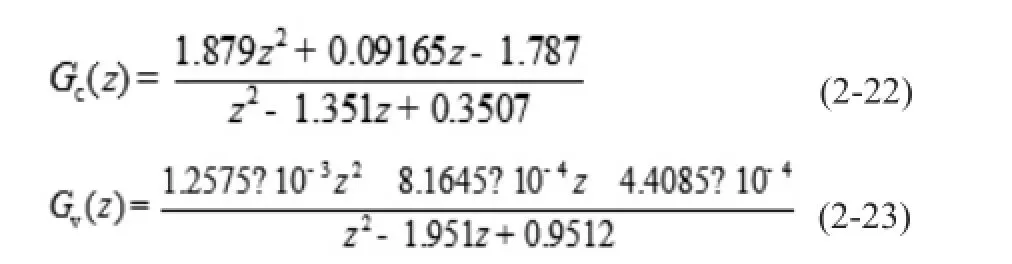
为验证电压电流双闭环控制的可行性,利用MATLAB对Buck电路进行仿真,由于本系统采用离散方式运行,为此可采用双线性变换设计法[4]进行变换,经过补偿网络设计与仿真调整得到电流补偿网络Gc(z)和电压补偿网络Gv(z):
其仿真波形如图6所示,在0-0.06s之间,负载电流为4.2A左右,此时电压为11.5V,在0-0.12s时,负载转为轻载时,即输出电流为2.25A左右,此时输出电压为11.7V,在0.12s后,负载加重时,即输出电流为3.15A时,此时输出电压为11.6V,由于给定电压为12V,无论负载如何变化,输出电压均在12V左右波动,且误差均小于5%,满足性能指标,而且负载在变化过程,系统在很快时间便稳定在一定电压值,说明其动态性能良好,由此电压电流双闭环控制参数设计较为合理。
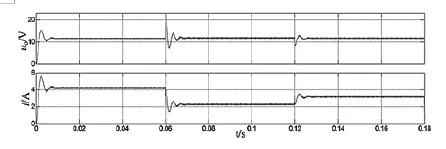
图6 Buck输出电压和输出电流曲线
4 小结
本文以Buck电路为基础,利用基础建模法对系统进行建模与分析,该方法简单、实用、易于理解,且该方法同样适用其它电路分析。而且本文根据控制对象的bode图大概确定各环节补偿网络,并以此为基础设计电压电流双闭环控制的基本参数。
随着数字芯片应用越来越多,相比于模拟控制,数字控制技术在DC/DC变换器具有许多独特优势,为此本文利用双线性变换法将控制对象的补偿网络转化为离散型,有效验证设计电压电流双闭环控制的可行性。
[1]王兆安,刘进军.电力电子技术[M].机械工业出版社,2011.
[2]程红,王聪.开关变换器建模、控制及其控制器的数字实现[M].清华大学出版社,2013.
[3]胡寿松.自动控制原理[M].科学出版社,2007.
[4]周至凯.基于数字化峰值电流控制Boos开关变换器的建模与仿真[D].华南理工大学,2012.
[5]林渭勋.现代电力电子技术[M].机械工业出版社,2005.
[6]Jang S J,Lee T W,Lee W C,et al.Bi-directional DC-DC converter for fuel cell generation system[C].35th Annual IEEE Power Electronic Specialist Conference,Germany,2004:4722-4728.
[7]Duan R Y,Lee J D.High-efficiency bidirectional DC-DC converter with coupled inductor[J].IET Trans.on Power Electronics,2012,5(1):115-123.
Simulation Research of double loop control system design based on Buck circuit
GAO Ben-you,ZHANG Wei-ping,ZHANG Xiao-qiang
In order to ensure the DC/DC converter output voltage stability and has faster response speed,it need to model the DC/DC switch converter,and DC/DC converter is nonlinear,time-varying characteristics.In this paper,we can through the basic modeling method of the system of AC small signal analysis,control object transfer function,and the use of compensation network to form a voltage and current double closed-loop control system,the control method is emulated by MATLAB,whitch Verify the feasibility of the system modeling design.
Converter;modeling;AC small signal