基于A3航空摄影系统和Smart3d软件快速进行实景影像三维模型生产
2017-03-01张鑫鑫王冬赵凤梧
张鑫鑫,王冬,赵凤梧
(天津市测绘院,天津 300381)
基于A3航空摄影系统和Smart3d软件快速进行实景影像三维模型生产
张鑫鑫*,王冬,赵凤梧
(天津市测绘院,天津 300381)
当今社会,数字城市建设飞速发展,对城市实景影像三维建模需求越来越多,A3数字航摄仪以其独特的优势能快速辅助城市实景影像三维模型生产。本文以天津重点区域为例,利用先进的A3数字航摄仪,结合Smart3D软件,详细阐述了从数据获取到实景影像三维模型制作的过程。
A3数字航摄仪;Smart3D;三维建模
1 引 言
数字城市作为数字地球的重要组成部分,为数字地球的建设起到巨大的推动作用。三维可视化技术的迅猛发展也为数字城市的建设增加了更直观的表现形式。三维数字城市发展至今,主要方式仍然采用传统人工手工建造三维模型的方式来完成数字城市三维模型的制作。建设单位通常使用3ds Max软件根据建筑的形态进行人工建模,纹理采集以及模型贴图,这种方式通常需要大量的人工来完成模型的制作,一般来说完成城市级规模的三维建筑模型需要漫长的数据制作与数据加工周期,过长的生产周期和高昂的成本阻碍了三维城市的发展。而倾斜摄影技术是国际测绘领域近几年来发展起来的一项高新技术,它推翻了以往只能从垂直角度拍摄的局限之处,通过高科技传感器通过不同角度采集影像,从而大范围、快速、自动构建三维模型,近几年来利用倾斜摄影技术来生产实景影像三维已成为业内重点关注和研究的方向。
A3数字航摄仪是新一代步进式分幅成像的数字航摄仪,一次飞行可同时获取垂直和斜拍影像数据。A3因其长焦距的镜头,保证了很高的数据获取能力,A3数字航摄仪相比同类相机,在效率上高出1.5倍~2.5倍,在成本上节约了15%~20%。在同样成果分辨率和精度要求下,A3能够飞行更高的高度,覆盖更大的面积,可以获得更高分辨率的成果,非常适合进行城市航空摄影。我院使用A3航摄仪及Smart3D软件于2014年12月完成了天津市重点城区影像分辨率为 8 cm面积为 3 000多km2实景影像三维自动建模任务。因此,使用A3航空摄影系统获取倾斜影像,利用Smart3D构建三维模型对城市快速建模具有重大的意义。
2 A3航空摄影系统及Smart3D软件简介
2.1 A3航空摄影系统
A3航空摄影系统包括A3数字航摄仪和Lightspeed后处理系统两大部分。A3数字航摄仪(A3 digital aerial camera)是以色列VisionMap公司生产的新型航摄仪,它包括数据存储器(VSSR),控制电脑(VMU),相机镜头系统,安装面板,飞行显示器,系统连接线和后处理拷贝系统组成。具体如图1所示:

图1 A3数字航摄仪示意图
Lightspeed后处理系统主要包括Dataviewer数据处理系统和Control Center数据分配及运算系统。
Dataviewer数据处理系统主要进行数据的编辑、GPS导入、区域合并、空三刺点、辐射校正、数据导出等操作。
Control Center数据分配及运算系统主要进行数据空三、DEM、DOM生产及超大像幅导出等操作。
2.2 Smart3D软件
Smart3D软件是法国Acute3D公司研发的一款革命性的制作实景影像三维模型的软件系列。它可以通过简单的照片生成具有高分辨率的真实三维模型。近乎于没有任何限制的照片拍摄要求,并且数据处理的过程也具有高伸缩性和高效率,整个处理过程不需要人工干预。它基于高性能摄影测量、计算机视觉与计算几何算法,在实用性、稳定性、计算性能、互操作性方面,能够满足严苛的工业质量要求,其关键优势是快速,简单,全自动。
3 A3数字航摄仪获取倾斜影像技术优势
3.1 扫摆范围广空三精度高
A3数字航摄仪超大相幅航空摄影,一次扫摆可覆盖旁向2条~3条航线,同一地物可以在多张影像上出现,视角广、冗余度高。利用A3自有的后处理算法可以解算每张像片高精度的影像外方位元素,这些高精度外方位元素可直接导入Smart3D中使用。
3.2 多角度航空摄影可节约飞行空域
A3数字航摄仪具有0°,45°,135°三种不同的安装方式,具体安装如图2所示:
图2 A3数字航摄仪安装角度图
0°:数字航摄仪主纵线与飞行方向一致,数字航摄仪镜头扫描方向与飞行方向垂直,飞行基线最短。
45°:数字航摄仪主纵线以飞行方向为轴,逆时针旋转45°,数字航摄仪扫描方向与飞行方向夹角为135°。
135°:数字航摄仪主纵线以飞行方向为轴,逆时针旋转135°,数字航摄仪扫描方向与飞行方向夹角为225°。
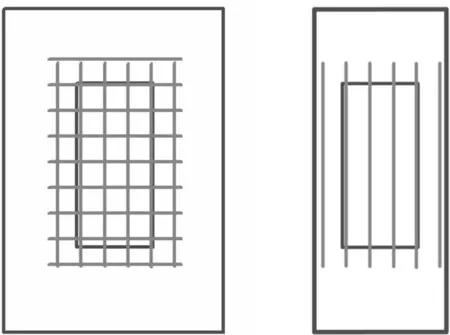

图3 传统数字航摄仪航线空域范围图 图4 A3数字航摄仪航线空域范围图
图3、图4中红色线区域为三维模型制作范围,蓝色线区域为航空摄影所需的空域范围,绿色线为航线。图3所示为普通交叉航线铺设,需要申请交叉飞行空域,增加了空域申请范围,并且狭长区域铺设短边时会增加航线条数,增加了飞机掉头时长。图4中可以看出,A3数字航摄仪可以沿同航线45°、135°两角度安装方式获取4个方向的倾斜影像。由此可以看出,A3数字航空摄影系统在影像三维数据获取方面既节省了空域,又提高了效率。
4 利用A3数字航摄仪获取的Frame生产实景影像三维技术路线
4.1 原始数据下载、预处理
使用LightSpeed全自动地面数据处理系统将数据下载,下载完毕后使用FlightViewer对照飞行日志进行数据检查,检查航线完整性及是否发生漏洞及云、烟遮盖地物等问题。
使用Preprocess.exe工具对原始数据进行预处理。
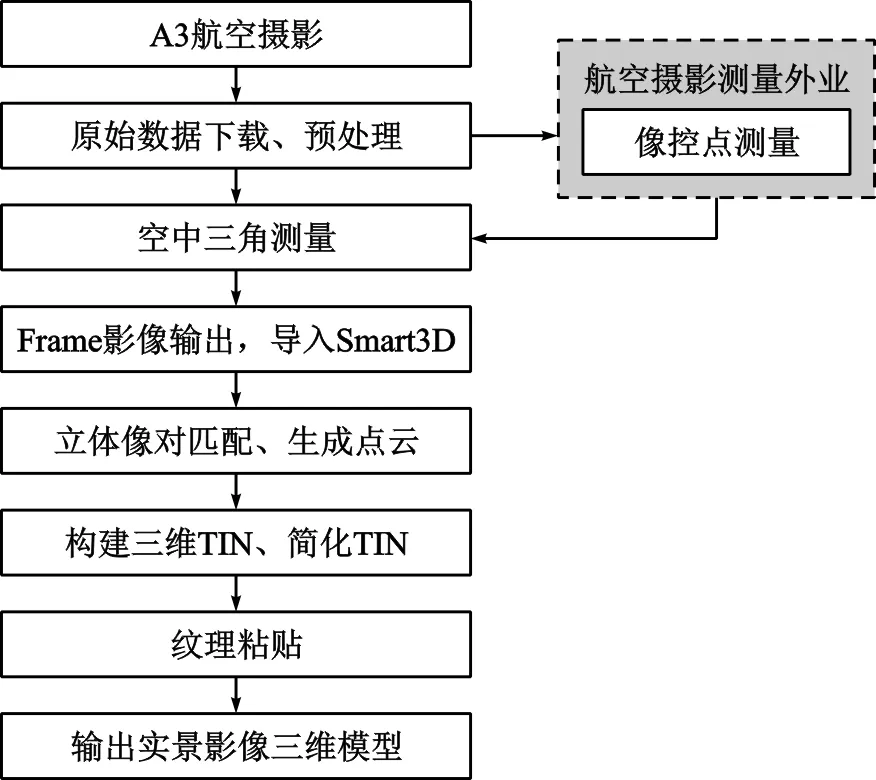
图5 利用A3数字航摄仪获取的Frame生产实景影像三维技术路线图
4.2 GPS数据解算及导入
按照载波相位测量差分GPS定位技术,采用高精度动态数据处理软件(GrafNav)结合基站数据精密解算每一时刻的机载GPS天线相位中心WGS84坐标。
在Dataviewer中使用ImportGPS工具进行导入,如图6所示。

图6 GPS数据导入
4.3 影像辐射精度校正
使用LightSpeed全自动地面数据处理系统中的DataViewer软件对原始影像数据(Frame)进行辐射校正,如图7所示。

图7 影像辐射精度校正
4.4 数据整理及加密区域划分
依据航空摄影影像数据情况及影像数据地理位置分布情况合理划分测区,应保证分区形状规则,分区间旁向有两条航线的重叠,航向有4个超大影像覆盖,如图8所示。
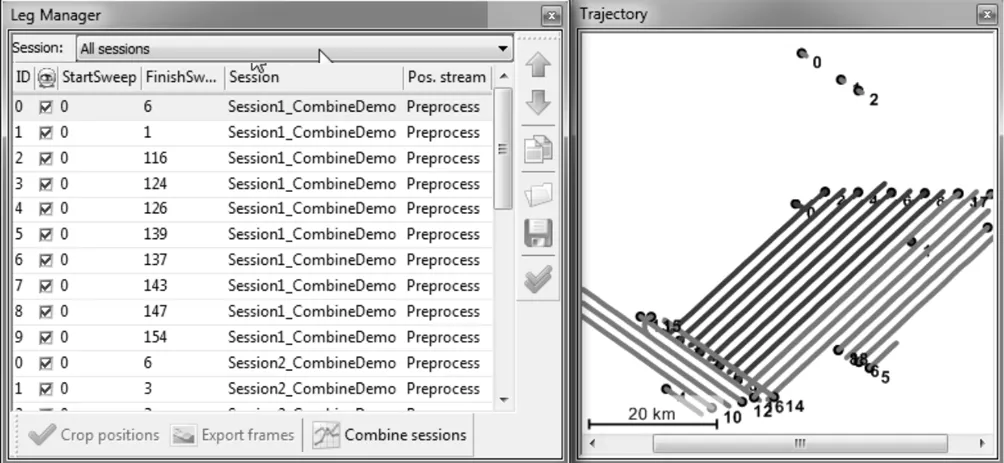
图8 加密分区划分
4.5 空中三角测量解算
在ControlCenter中创建空三计算任务,正确的设置相关参数,如图9所示。
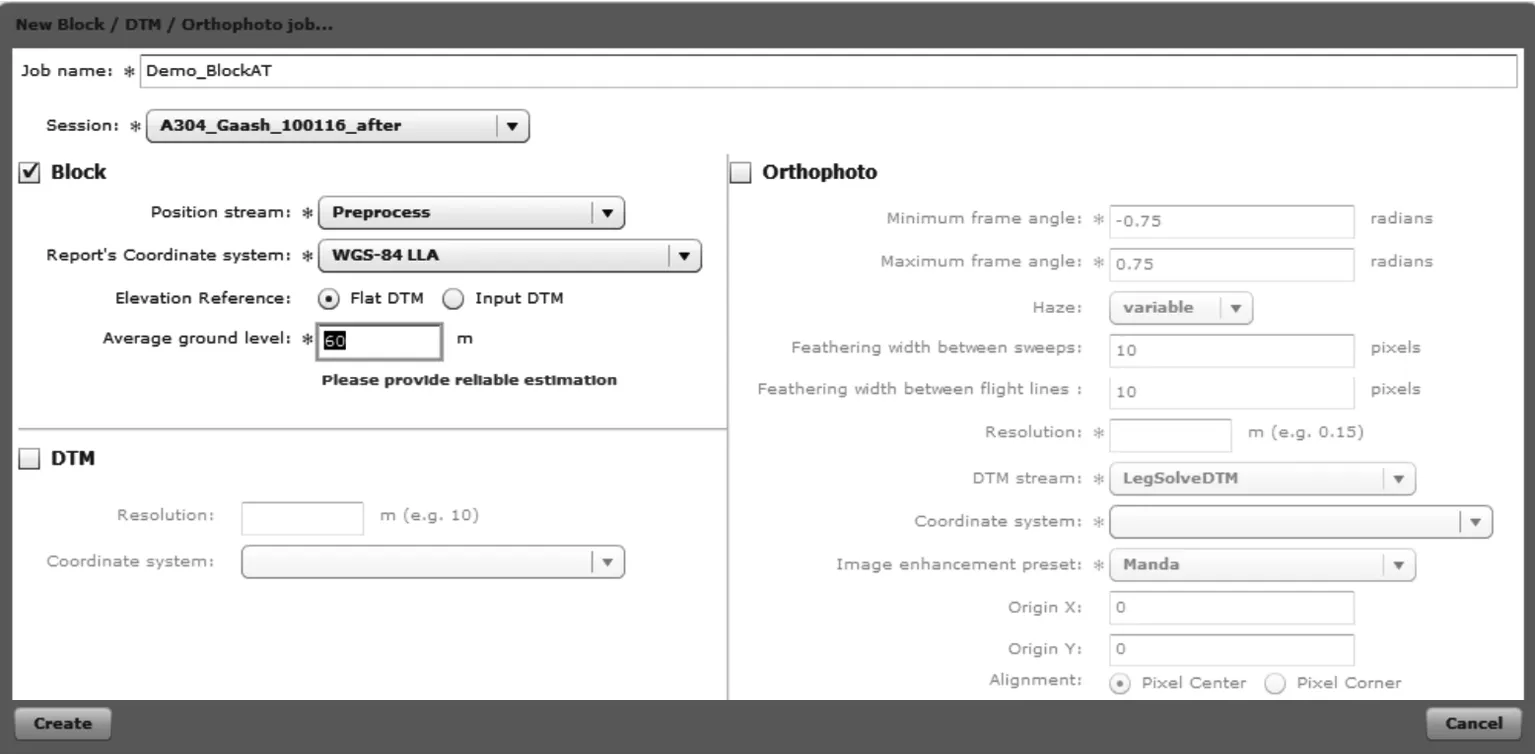
图9 空三解算
4.6 区域网接边
对区域网间的公共点进行较差,以检验区域网的接边精度。
4.7 空三frame影像输出
将空三加密后的Frame影像输出,正确的设定输出参数,如图10所示。

图10 Frame影像输出
4.8 像片导入、像对配对及同名相点密集匹配
完成了航空摄影空中三角测量后,需要将带有空三信息的Frame单片按照三维重建分区为一组导入到Smart3D软件中,并进行像对配对及同名点密集匹配,像对配对是选择有互相重叠关系的单片frame两两为一组建立立体像对,并且提取每个相对的关键点(key point),最终完成表达同一地物的同名相点密集匹配,并建立三维点云,如图11、图12所示。

图11 选择空三方式
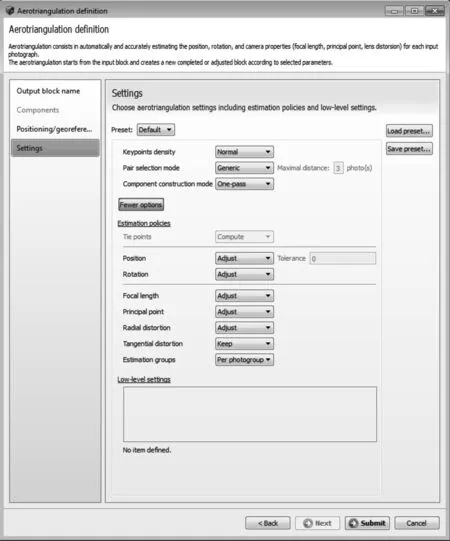
图12选择相片外方位元素引用方式
4.9 三维重建Tile分幅划分
依据三维重建Tile分幅划分规则划将实景影像三维模型数据按tile分幅输出。Tile的大小为400 m×400 m。
4.10 实景影像三维模型分区接边
根据三维重建分区的位置及每个分区实际计算生成的Tile文件,获取每个分区的Tile结合表,利用ArcMap叠加显示,将每个分区外扩的那些Tile剔除;然后分析相邻分区的重复Tile,按照保留中间剔除边界的原则,剔除重复的Tile;对于最终的不含重复Tile的分区的三维模型,重新组织到一个或若干新区中。
5 天津市重点区域实景影像三维生产
天津市重点区域既有高大的楼房,又有低矮密集的砖房,地物丰富多样,本文以天津市重点区域为例,介绍基于A3航摄仪Frame影像利用Smart3D软件生产实景影像三维模型技术流程。
5.1 实景影像三维生产区域介绍
天津市实景影像三维生产区域包括:武清区中心城区、北辰区大部、市内六区全部(红桥区、河北区、和平区、河东区、南开区、河西区)、西青区中心城区、东丽区中心城区、津南区全部、中新生态城及滨海新区一部分。地面分辨率为8 cm,制作面积为3 000多km2。实景影像三维生产范围如图13红色区域所示:

图13 实景影像三维生产范围图
5.2 A3技术设计及航空摄影
设计分辨率为8 cm,设计的航向重叠度为60%,旁向重叠度为80%,A3航摄仪使用45°、135°角安装,同航线飞行两遍。摄区航线总长度 9 864 km,航线数量304条,航空摄影使用运12飞机,飞行速度 280 km/h,总共飞行10个架次。
5.3 实景影像三维生产
天津市重点区域实景影像三维生产全部采用Smart3D软件,具体过程如下:
(1)空三加密,Frame导出。使用A3航摄仪专用的后处理软件Lightspeed对飞行后的数据进行数据整理及加密区域划分,然后在control center中计算空三,按区域导出带有空三信息的Frame影像。
(2)Frame导入,内部空三。在Smart3D中新建工程,将Frame导入进工程中,开始计算Smart3D内部空三,提取大量特征点,进行像对配对及同名点密集匹配,像对配对是选择有互相重叠关系的单片frame两两为一组建立立体像对,并且提取每个相对的关键点(key point),最终完成表达同一地物的同名相点密集匹配,并建立三维点云,如图14所示。

图14 三维点云图
(3)构Tin。根据生成的点云构建不规则三角网,并生成白膜的三维模型,如图15所示。

图15 三维白膜图
(4)纹理粘贴及实景影像三维模型输出。自动计算选择最佳角度纹理粘贴在白膜上,最终完成实景影像三维模型生产,如图16、图17所示。

图16 三维模型图

图17 三维模型图
5.4 实景影像三维效果和效率
生成的城市实景影像三维模型整体效果较好,模型色彩均衡,空间立体感强。A3独特的扫摆方式可从多角度、多航线获取同一地物不同视角的影像,最大限度获取地物细节。基于A3航空摄影系统构建的实景影像三维模型的建筑物根部立面细节部分,均能真实地构建出来,并且解决了采集真实纹理困难、效率低下的难题。本次生产的Smart3D软件共有4个节点,一天可生产 15 km2的实景影像三维数据,整个 3 000 km2耗时7个月,真正地实现了全自动快速三维实景城市的生产,如图18~图20所示。

图18 实景影像三维建筑物底部视图

图19 实景影像三维建筑物侧视图

图20 实景影像三维建筑物后视图
6 总 结
本次利用A3航空摄影系统结合Smart3D软件进行天津市重点区域实景影像三维生产从航空摄影到最终生成影像三维模型共耗时7个月,完成了 3 000多km2实景影像三维建模任务,航摄效率高、建模速度快,如此高分辨大范围城市实景影像三维自动建模在全国绝无仅有。A3数字航摄仪以其独特的扫摆方式,从多角度获取建筑物影像,同一地物在几十张像片上都有显示,避免了三维建模时因城市建筑物密集及高大建筑物遮挡而造成的漏洞。A3数字航摄仪获取的倾斜影像生成的三维模型整体色彩均衡,建筑物细节丰富,为数字城市建设快速顺利的进行提供了有力保障。
[1] 张鑫鑫,王冬,胡珂等. 基于A3航摄仪SLF影像进行立体测图精度探讨[J]. 城市勘测,2015(5):83~85.
[2] 戴竹红,李柳兴,邹发东. 基于SMART3D的实景三维建模与应用[J]. 广西城镇建设,2015(4):113~115.
[3] 周杰. 基于倾斜摄影测量技术构建实景三维模型的方法研究[J]. 价值工程,2016,25:232~236.
[4] 周树旺. A3无控制点获取高精度结果的原理和方法研究[J]. 科技创新导报,2014,24:24~27.
[5] 贾会玲,刘利成. 基于A3数据采集处理技术的城市信息化新技术[A]. 中国城市规划学会.城市时代,协同规划——2013中国城市规划年会论文集(13-规划信息化与新技术)[C].中国城市规划学会:,2013:11.
[6] 苏永奇. 基于A3系统的正射影像生产流程研究[J]. 科技创新导报,2015,20:36.
[7] 薄正权,张宇. 倾斜摄影在长春市城市建模中的应用[J]. 城市勘测,2016(3):93~96.
[8] 严明,李燕燕. A3数码航空摄影测量系统概述[J]. 科技资讯,2013(11):37~40.
Fast 3D Model Production of Real Image Based on A3 Aerial Photography System and Smart3d Software
Zhang Xinxin,Wang Dong,Zhao Fengwu
(Tianjin Institute of Surveying and Mapping,Tianjin 300381,China)
In today's society,the rapid development of digital city construction needs more and more city real 3D modeling,A3 digital aerial camera with its unique advantages can give a great help to the 3D modeling. Taking the important area of Tianjin as an example,using advanced A3 digital aerial camera and Smart3D software,This paper describes the process from data acquisition to 3D modeling production in detail.
A3 digital aerial camera;Smart 3D;3D modeling
1672-8262(2017)01-76-06
P231
B
2016—10—28 作者简介:张鑫鑫(1986—),男,工程师,主要从事RS、三维城市模型数据加工与处理等技术工作。 基金项目:国家测绘地理信息局2014年度测绘地理信息公益性行业科研专项(201412012)
