客车直驱混联与AMT混联系统仿真对比分析
2017-02-28苏亮
苏 亮
(厦门金龙联合汽车工业有限公司,福建厦门361023)
客车直驱混联与AMT混联系统仿真对比分析
苏 亮
(厦门金龙联合汽车工业有限公司,福建厦门361023)
通过Cruise软件对直驱混联与AMT混联两种构型搭建模型,应用Simulink软件搭建整车控制策略,并将Simulink控制策略文件输入至Cruise软件模型中,对整车各项参数进行联合控制,对整车动力性、经济性进行联合仿真。
混联客车;自动机械变速器;Cruise;Simulink;控制策略
本文对传统直驱混联状态城市客车进行构型分析,由于直驱混联结构中应用的驱动电机比较大、成本较高,但是整车动力性表现仍不尽如人意,所以在此基础上增加一个两档AMT,从而减小驱动电机输出扭矩,在保证整车成本略有降低的前提下,提升整车动力性并优化整车经济性。本文使用Simulink进行各工作模式的控制策略编写,将Simulink控制策略导入Cruise自带模块中,实现整车动力性、经济性的联合仿真分析。
1 直驱混联城市客车的构型与控制策略
将传统直驱混联[1]结构方案无变速器配置设定为构型一,其结构是基于起动机、发电机一体化的中度混合,动力输出路线为发动机-ISG电机-离合器-驱动电机-后桥-轮胎。该方案低速时由驱动电机纯电驱动,车速提升至30 km/h左右时发动机起动介入,一般动力满足的前提下发动机单独驱动,当需要爬坡或急加速时,驱动电机介入辅助动力输出,构型如图1所示。在传统直驱混联基础上,减小TM电机(即驱动电机)的峰值与额定扭矩,在TM电机后增加一个两档AMT变速器。该方案总体成本略有降低,此构型包含构型一的所有工作模式,额外优势在于可以根据整车动力需要及时调整AMT变速器的档位,从而提升整车的动力性和经济性。将此方案设定为构型二,如图2所示。构型一、二基本参数见表1。
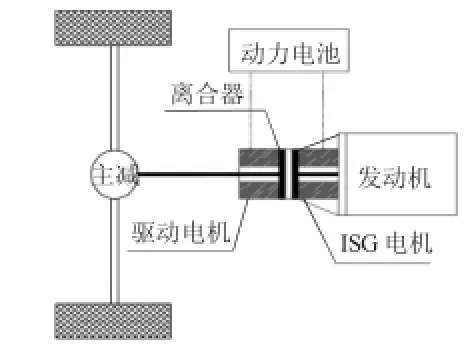
图1 构型一(直驱混联)
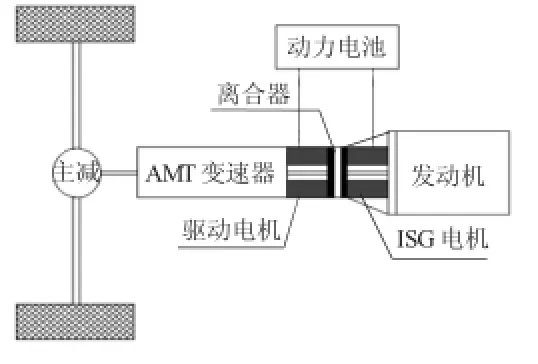
图2 构型二(AMT混联)

表1 直驱混联(构型一)与AMT混联(构型二)客车构型基本参数
根据发动机、ISG电机、驱动电机工作模式的各种组合形成整车工作模式,见表2。
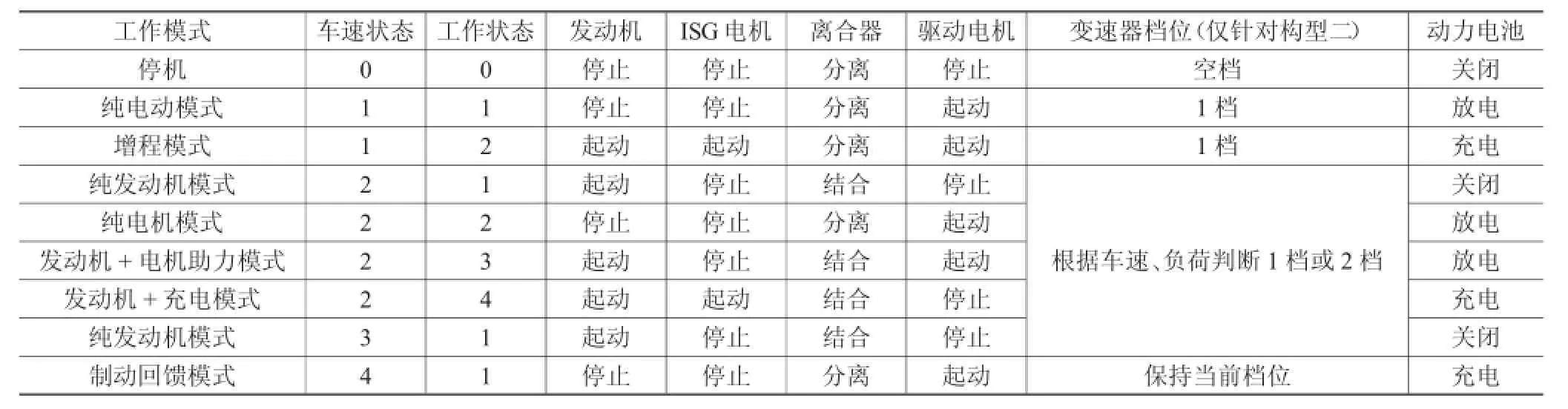
表2 直驱混联与AMT混联混合动力系统工作模式和部件状态
车速状态及工作状态均包含0、1、2、3、4五种数值,相互组合后代表唯一的工作模式,将状态数值输入给Simulink中计算器模型进行逻辑分支判断,控制各参数量数值大小,进而控制整车。
各工作模式之间切换条件如下[2]:
1)停机模式与纯电动模式切换。当车辆起步前,判断动力电池SOC状态,若SOC大于纯电允许设定电量时,车辆进入纯电模式,整车由驱动电机提供动力。
2)纯电动模式与发动机模式切换。当车速增加至发动机经济转速区下限时,发动机起动工作,整车动力由发动机单独提供。
3)纯电动模式与增程模式切换。当车速在纯电动范围内,若SOC小于纯电允许设定电量时,车辆进入增程模式,整车仍由驱动电机提供动力,此时发动机起动并带动ISG电机发电给动力电池充电,使动力电池SOC尽快提升至控制值。
4)发动机模式与混合动力模式切换。当整车需求功率大于发动机单独提供最佳燃油效率功率时,车辆进入混合动力模式,发动机运行在最佳燃油效率区域,驱动电机提供功率为整车需求功率减去发动机提供功率。
5)发动机模式与行车充电模式切换。当整车需求功率小于发动机单独提供最佳燃油效率功率时,车辆进入行车充电模式,发动机运行在最佳燃油效率区域,ISG电机为发电机对蓄电池进行充电。
6)制动回馈模式。当驾驶员松开油门踏板使车辆滑行或踩下制动踏板使车辆制动时,整车进入制动回馈模式。回馈策略根据整车初始滑行或制动车速、SOC状态、制动踏板深度进行判断,相应分配制动能量比例给ISG电机、驱动电机以及机械制动。
变速器档位策略仅存在于构型二,基于车速与整车驱动负荷进行两参数控制换档。换档策略如图3所示。当整车车速及油门开度运行在实线升档线时,变速器档位将从1档升至2档,在实线升档线右侧区域,变速器档位总是保持在2档;当整车车速及油门开度运行在点划线降档线时,变速器由2档降至1档,在点划线降档线左侧区域,变速器档位总是保持在1档。
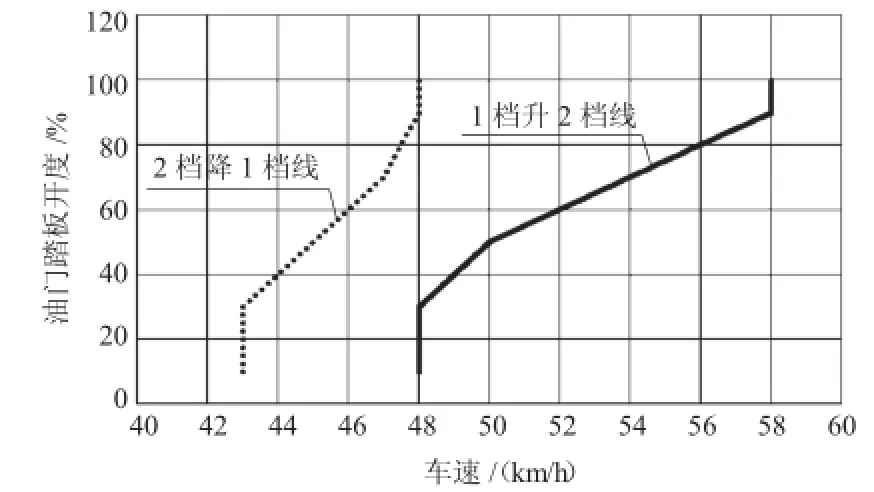
图3 变速器换档策略
2 直驱混联与AMT混联客车的性能仿真
2.1 整车参数
整车基本配置参数简化后见表3,两种架构的整车级参数完全一致。
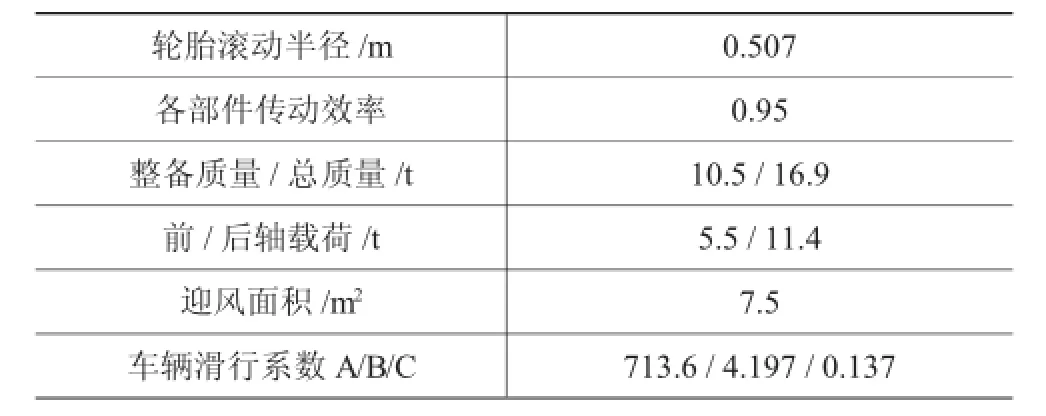
表3 整车部分Cruise计算需求基本参数
2.2 Crulse模型建立
根据整车构造在AVL-Cruise中建立仿真模型,输入模块所需要的各项基本参数,并完成机械连接与电气信号线连接[4-5]。构型一、二Cruise模型搭建如图4和图5所示。构型二与构型一的区别仅在构型二(图5)中的驱动电机与主减之间增加一个AMT二档变速器,其余机械部分Cruise模型均与构型一一致。
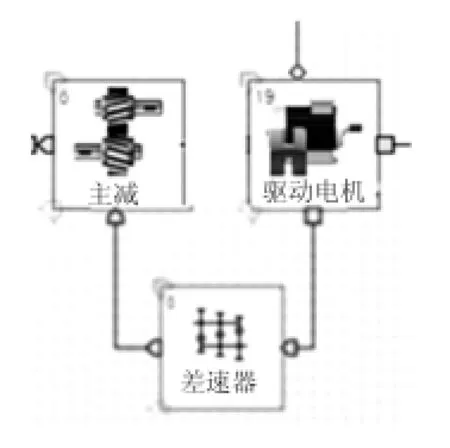
图5 构型二Cruise模型(局部)(AMT混联)
2.3 Simulink模型建立
2.3.1 整车控制策略
图6和图7是用Simulink搭建的直驱混联与AMT混联客车的整体控制策略。表4为Simulink模型的输入与输出信息对应表。该策略中包含整车执行器和整车计算器两部分。整车执行器主要是通过接收Cruise模型中各信号参数进行判断分析控制,输出车速状态与模式状态两个参数,这两个参数输入给整车计算器模型;整车计算器主要功能是通过接收整车执行器的输出参数以及Cruise模型中各信号参数进行判断分析控制,输出发动机、ISG电机、驱动电机、变速器档位(仅针对构型二)、离合器控制参数等给Cruise模型并参与Cruise仿真计算。本文Cruise[6]与Simulink[7]联合仿真是通过MATLAB_DLL[8]模式实现。

表4Simulink模型的输入与输出信息对应表
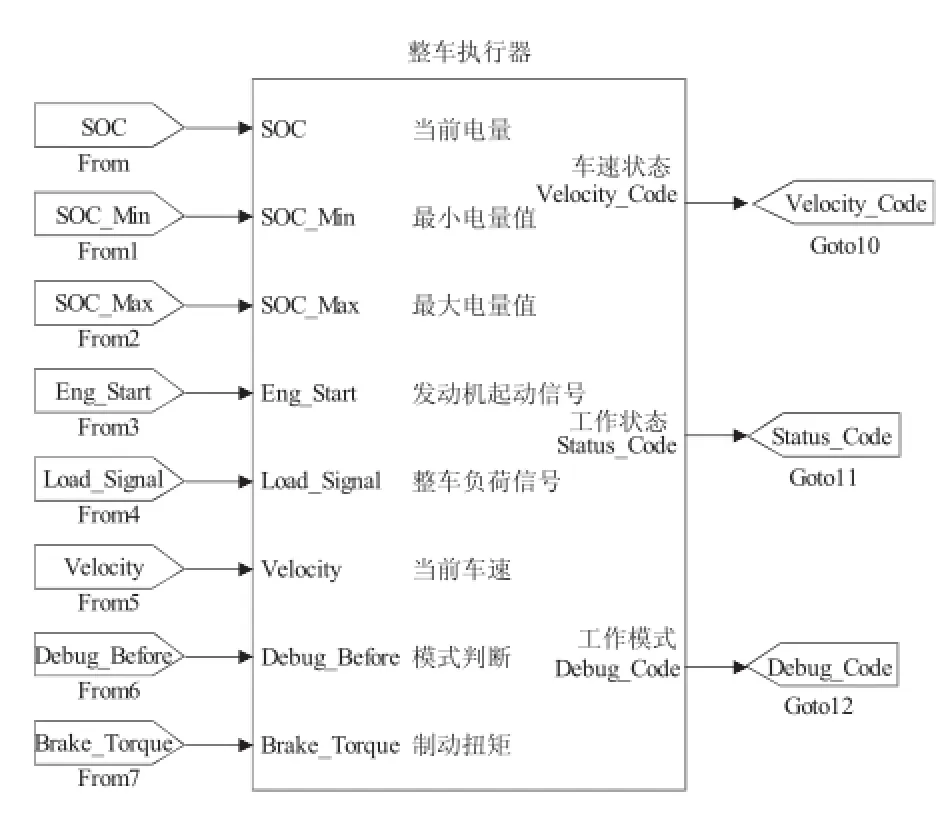
图6 Simulink整体控制策略(直驱混联与AMT混联整车执行器)
图6对应的策略说明,整车执行器是用来判断整车处于何种工作模式,并且通过车速状态与工作状态两个信号反馈给整车计算器,通过整车计算器来计算各部件的工作状态。直驱混联与AMT混联的工作模式一致,详见表2中的工作模式。区别在于整车计算器中直驱混联无变速器档位控制策略,AMT混联带变速器档位控制模块(即变速器档位计算器)。
图7对应的策略说明,通过图6判断完成整车的工作模式后,由整车计算器完成发动机、ISG电机、TM电机、离合器、变速器(针对AMT混联系统)的工作状态控制,从而实现此工作模式下的整车表现与驾驶员意图的实现。直驱混联与AMT混联的整车计算器仅有一处不同,即AMT混联系统需要变速器档位计算器参与逻辑判断,而直驱混联无变速器,所以无变速器档位计算器。为节省篇幅,将两者的整车计算器均体现在图7中,用文字体现区别。
相关底层逻辑代码封装在整车执行器与整车计算器模块中,此文不详细展开代码编写内容。
2.3.2 执行器模型建立
执行器通过Cruise传入的参数(SOC信号、Load型号、车速转速等)对整车需求的工况进行分类。主要的分类逻辑是先对速度进行分类,不同的速度区间输出一个状态信号,然后判断不同速度区间下所需要的工作模式,再输出一个工作模式的状态信号[9-10]。
2.3.3 计算器模型建立
计算器模型负责根据执行器输入的工作模式,对发动机、ISG电机、驱动电机、变速器档位、离合器部件的Load信号量及是否工作开关量进行控制。
变速器目标档位计算器(仅构型二)将Cruise模型发送过来的[当前档位]、[当前车速]、[整车负荷]信号作为输入源,进行综合计算得到当前工况下变速器的目标档位输出信号。
2.4 仿真分析结果
根据GB/T19754-2005[11]要求,按中国典型城市公交循环工况设定Cruise路谱,路谱曲线参见文献[11]。构型一和构型二的车速跟随情况、整车负荷、累计油耗、电量SOC变化情况分别见图8和图9。仿真结果见表5。
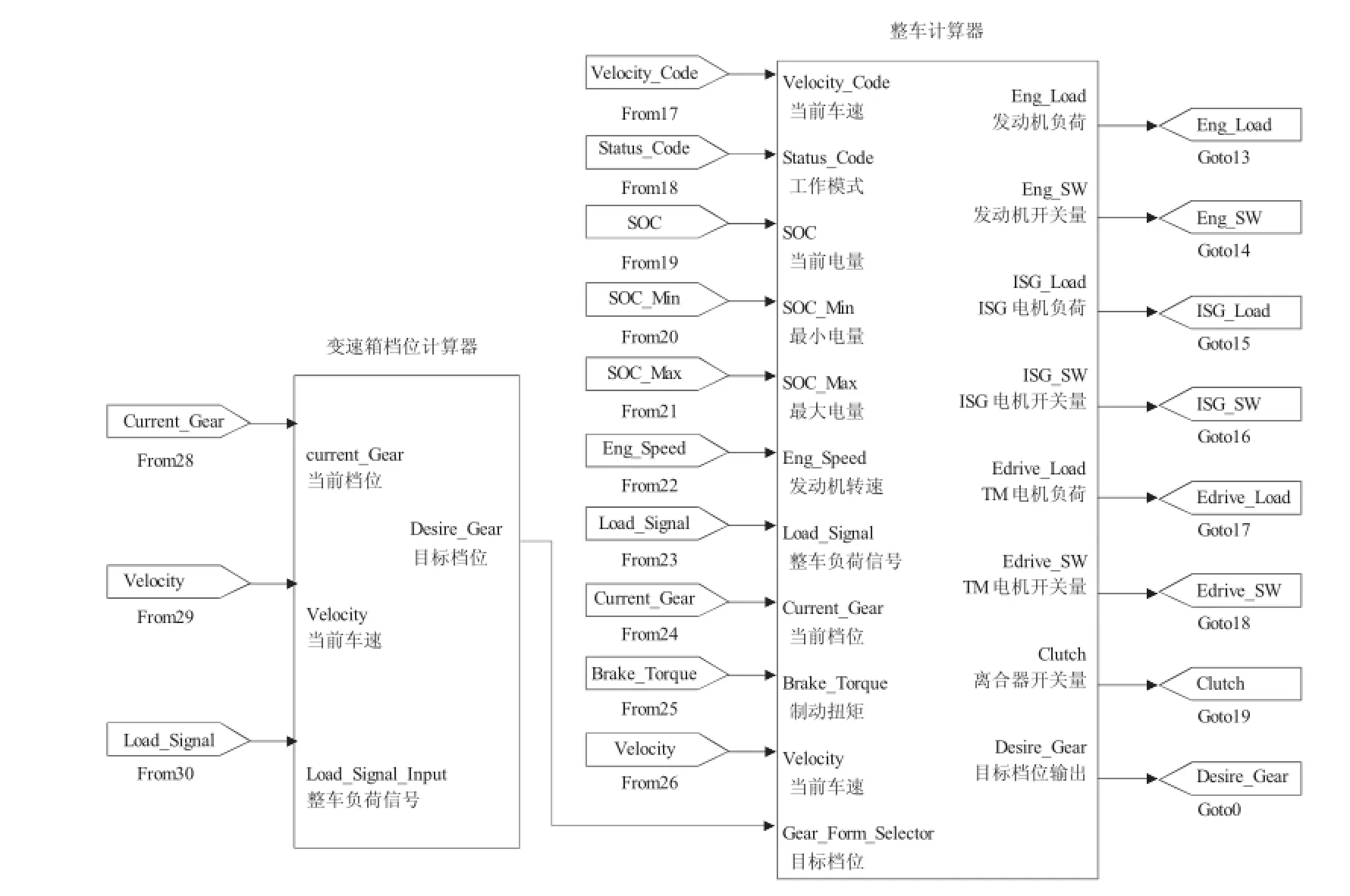
图7 Simulink整体控制策略(AMT混联与直驱混联整车计算器)

图8 车速、整车负荷、电池电量、累计油耗图(构型一)
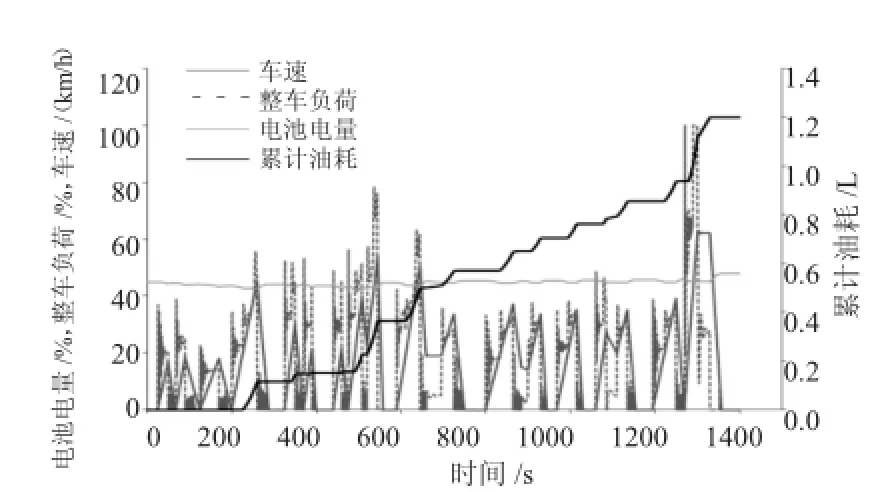
图9 车速、整车负荷、电池电量、累计油耗图(构型二)

表5 动力性经济性仿真结果
根据表5结果可知,构型二的爬坡度提高了6.14%,统一成油耗降低了3.24 L/100 km(相比构型一节油率达到16.7%)。
3 结束语
本文通过搭建整车两种构型工作模式的控制策略,基于Cruise及Simulink软件联合仿真分析构型一和构型二的整车爬坡能力及在典型城市道路运行工况下的电耗、油耗。分析表明,在减小TM主驱动电机输出扭矩的同时,增加一个二档AMT,整车的动力性和经济性均获得提升,为后续混联混动客车结构的选型、成本优化提供方向。
[1]郭晋晟,钟虎,杨林.ISG柴油混合动力客车能量分配策略研究[J].汽车工程,2008,30(2):121-125.
[2]爱塞尼.现代电动汽车、混合动力电动汽车和燃料电池车-基本原理、理论和设计[J].2版.倪光正,倪培宏,熊素铭,译.北京:机械工业出版社,2006.
[3]韩宗奇.用滑行试验法测定汽车空气阻力系数研究[J].汽车技术,2001(5):24-27.
[4]余志生.汽车构造[M].4版.北京:机械工业出版社,2006.
[5]王望予.汽车设计[M].4版.北京:机械工业出版社,2004.
[6]CRUISE基础培训教程李斯特技术中心(上海)2010.
[7]于群.MATLAB/Simulink电力系统建模与仿真[M].北京:机械工业出版社,2011.
[8]AVLCruise User's Guide李斯特技术中心(上海)2011.
[9]王中鲜.MATLAB建模与仿真应用[M].北京:机械工业出版社,2010.
[10]王健,赵国生.MATLAB数学建模与仿真[M].北京:国防工业出版社,2009.
[11]全国汽车标准化技术委员会.重型混合动力电动汽车能量消耗量:GB/T19754-2015[S].北京:中国标准出版社,2015:5.
[12]全国汽车标准化技术委员会.重型商用车辆燃料消耗量测量方法:GB/T27840-2011[S].北京:中国标准出版社,2011:12.
修改稿日期:2016-09-30
Co-simulation Analysis on Direct Drive Series-parallel and AMT Series-parallel Systems for Hybrid Buses
Su Liang
(Xiamen KingLongUnited Automotive IndustryCo.,Ltd,Xiamen 361023,China)
Through the Cruise software building the models of two types of configurations,one is direct drive series-parallel system,the other is AMTseries-parallel system,the author uses Simulink software tobuild the vehicle's control strategies,and inputs the Simulink control strategies file toCruise software's model toco-control the vehicle's parameters,and co-simulate the vehicle's power and fuel-economyperformance.
series-parallel hybrid bus;AMT;Cruise;Simulink;control strategy
U463.212
A
1006-3331(2017)01-0005-05
苏亮(1980-),男,高级工程师;主要从事整车设计系统匹配、车身轻量化和碰撞安全研发工作。