消防机器人行走控制系统的设计与实现
2017-02-27徐连伟魏崇毓
徐连伟,魏崇毓
(青岛科技大学 信息科学技术学院,山东 青岛 266061)
消防机器人行走控制系统的设计与实现
徐连伟,魏崇毓
(青岛科技大学 信息科学技术学院,山东 青岛 266061)
近年来火灾事故频发,消防人员的安全问题无法保证,“机器换人”这一理念是处置火灾救援的一个重要手段和发展趋势,消防机器人的研发在有效救援的基础上能保护消防人员的安全;针对火灾现场的环境复杂性,设计了消防机器人的行走控制方案,通过设计电机驱动系统的硬件电路与针对行走控制系统进行MATLAB模拟仿真,实现并优化了消防机器人的越障及转弯功能;主要对电机驱动部分及整个系统软件流程进行设计;通过测试,验证了行走控制方案的可靠性。
消防机器人;行走控制;MATLAB;PID;模糊PID
0 引言
近年来,发生的火灾事故频发,消防人员在火灾中丧生的现象值得思考。根据公安部相关统计数据,近5年来,全国在救火抢险一线牺牲的消防人员达144人,每年有300多名消防员受伤甚至致残[1-2]。消防员的献身精神固然可歌可泣,但如何在保障民众生命财产安全的同时减少消防员的伤亡?
2015年8月14日,国务院安全生产委员会发布紧急通知,要求立即在全国范围内深入开展危险化学品和易燃易爆物品专项整治。通知强调,要深化安全生产领域改革创新,加大各级政府和企业安全投入,加强应急处置能力建设,推广应用先进适用的安全技术装备[3]。
随着政策力度的加码和民众关注度的提高,引入机器换人的理念是大型石化企业和危险化学灾害处置救援的一个重要手段和发展趋势[4-5]。消防机器人替代消防队员接近火场可以有效的实施灭火救援、化学检验和火场侦察等活动。它的应用将提高消防部队扑灭特大恶性火灾的实战能力[6],对减少国家财产损失和灭火救援人员的伤亡产生重要的作用[7-8]。本文对消防机器人的硬件电路、系统关键技术、软件流程图进行解释。针对火灾现场的复杂环境,对消防机器人的行走控制模块进行详细的设计,并建立相应的运动理论模型,并进行系统仿真,以期达到实时检测和动态调节的结果。
1 系统硬件设计及关键技术
整体设计框图如图1所示。整个消防机器人控制系统主要分为两大部分,手持控制器和车载控制中心。手持控制器主要有四部分功能:控制消防灭火机器人的行走,水炮的动作(喷射开关、方向等),车载视频图像的回传显示,车载附件(灯、电源)等的控制;车载控制中心主要集成了探照灯、摄像头、水炮、传感器以及电机控制电路五部分。

图1 整体设计框图
消防机器人采用履带式车轮。履带式底盘通过将环状的循环履带环绕在驱动轮和一系列滚轮外侧,使车轮不直接于地面接触,而是通过循环履带于地面发生作用,再通过驱动轮带动履带[9]。实现车轮在履带上的相对滚动的同时,履带在地面反复向前铺设,从而带动底盘运动[10],履带式底盘的优点是着地面积比车轮式大,所以着地压强小;另外与路面粘着力较强,所能提供的驱动力大[11-12]。
消防机器人控制系统的架构搭建设计机器人的机械结构及控制系统的主要电路。从结构可靠性、应用环境、制造成本等角度进行机器人驱动系统机械结构设计,选用STM32F103R86T为主控芯片。对整个控制系统进行电路设计。手持控制器主要的功能:控制消防灭火机器人的行走,水炮的动作(喷射开关、方向等),车载视频图像的回传显示,车载附件(灯、电源)等的控制。
结合所设计的履带移动机器人结构,以及移动机器人的运动特点,对驱动系统不同驱动模块的电机进行匹配计算和选型。移动机器人的运动方式可简化为匀速行驶、原地转动、爬坡越障3种模式。对各种运动方式的功率进行计算,相比较电机的额定功率及峰值功率,选出最合适的电机类型。目前选定的类型为86BL100-440-ZD-86XG20,86直流无刷电机。
电机驱动电路的设计,消防机器人采用履带式移动结构,针对电机的运行方式,对驱动电路进行设计。电机驱动电路控制电机的运转,电机的转速则需要机器人控制器STM32进行控制。
消防机器人无线传输技术的实现,采用433 M无线模块。手持控制器和消防机器人直接通过433 M无线模块进行通信,实现远程控制功能。433 M模块的特点是发射功率比较大,传输距离比较远,比较适合恶劣条件下进行通讯[13]。
2 行走控制算法
消防机器人采用轮履式结构,结合独立的电机驱动技术。通过电机控制机器人的转向实现前进、转弯、倒退以及原地旋转。每一个轮子的控制结构和方式都是相同的,如图2所示。车载控制器接收手持控制器指令,通过CAN总线网络对电机控制器进行控制,然后电机带动轮子进行旋转。
电机的驱动电路部分与数字控制部分相比较,为伺服控制系统中的重要组成部分,驱动电路是主控芯片与直流无刷电机联结的纽带[14-15]。因而,电机驱动电路的性能将直接影响到该系统的整体性能和可靠性。

图4 基于IR2130的电机驱动电路
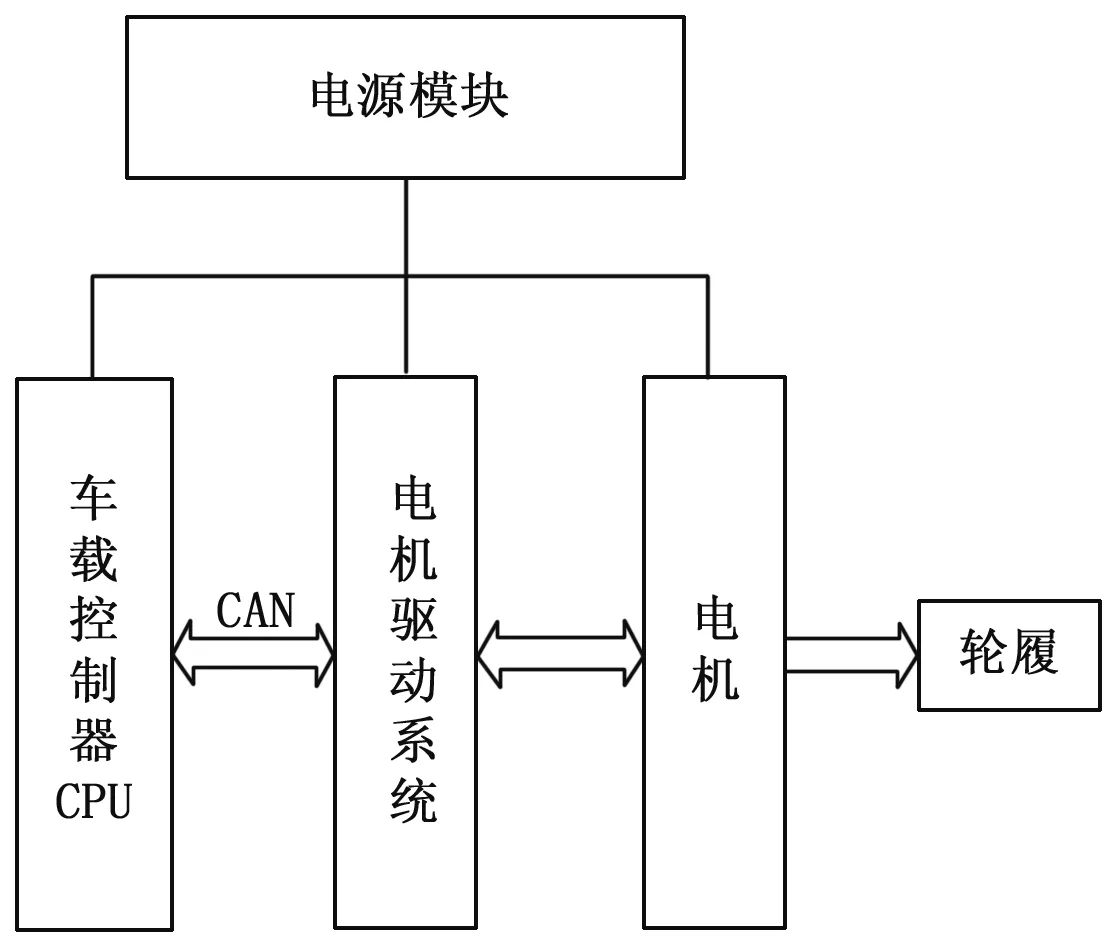
图2 运动模块控制结构图
2.1 电机驱动电路设计
设计采用的直流无刷电机为三相六状态,两两导通的方式[16]。电机系统主要由CPU主控芯片、换相电路、基于IR2130的驱动电路、电流及电压检测保护电路以及霍尔信号处理电路组成,其中换相电路是由6个MOSFET组成的三相全桥电路。系统工作时,主控芯片分析位置,发送信号到IR2130输入端,由FAN73892驱动换相电路,控制MOSFET功率管的导通与关断。通过对转子位置传感器检测的信号(HA、HB、HC)进行逻辑变换,即传送到电路里的为数字信号,从而产生脉宽调制信号PWM,经过放大处理后传送至逆变器的功率开关,从而控制电机按一定顺序正常进行工作。

图3 电机控制方案图
无刷直流电机采用三相桥式逆变电路[17],正常情况下需要四组独立电源,这使驱动电路变得较为复杂,导致逆变器的可靠性降低,采用国外一家公司生产的专用芯片FAN73892,这款芯片只需一个供电电源便可驱动三相桥式逆变电路的6个功率开关器件,使得驱动电路变得简单可靠。同时可提供更高的开关频率PWM调速控制[18],因此本文选择了专用驱动芯片FAN73892来驱动六个功率器件,只需一个供电电源去驱动FAN73892,即可驱动三相桥式逆变电路中的6个MOSFET,图4为FAN73892驱动逆变器功率管的电路原理图。
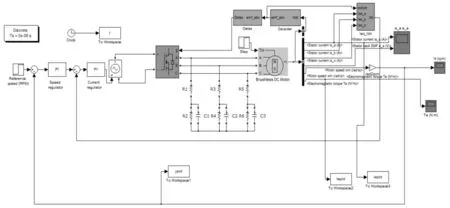
图6 电机仿真模型
如图4所示,U2极为IR2130驱动芯片,HO1-HO3,LO1-LO3分别为图3中MOSFET功率管开关器件的驱动信号输出端,驱动信号先经过集成于FAN73892内部的脉冲处理器和电平移位器进行电位变换等,送至CPU进行处理。HIN1-HIN3,LIN1-LIN3为MOSFET功率管驱动信号的输入端。正常工作时,霍尔信号经过变换传入CPU处理,CPU根据PID算法调试PWM信号传送给FAN73892的HIN1-HIN3、LIN1-LIN3。输入6个引脚的驱动信号经输入信号
图4中CN5~CN10是自举电容,为了防止当外电流发生过流或者直通时,电路的驱动信号检测器迅速翻转,造成器件的损坏。二极管D1、D2、D3与电阻R1、R2、R3分别串联,组成了漏源极之间的保护电路,二极管的主要是为了限制栅极电压在稳压管稳压值以下,保护MOSFET不被击穿,电阻是为了释放电荷,不然电荷积累,电荷的积累也会使MOSFET被击穿。因此这部分电路属于MOSFET的内部电压保护电路。
2.2 电机控制方法
随着科技的发展,对无刷直流电机控制精度,以及动态性能和稳态性能的要求逐渐提高,传统的PID控制器尽管算法简单、鲁棒性好以及可靠性高,但逐渐难以满足对控制系统快、准、稳的要求。
本文采用模糊控制的方法对电机控制器进行设计,与传统的PID控制算法、模糊PID控制相比较,无需建立精确数学模型的控制对象、复杂系统的处理等。因此,当外部控制条件发生变化时,模糊控制不需要获取系统的数学模型就能对系统PID控制参数进行实时整定。
利用MATLAB中对模糊PID算法和传统PID算法进行简单比较,在传统PID中kP=5,kI=0.1,kD=0.01。对模糊PID设置如下:k=60,kD=2.5,kI=0.01,k=0.8。实验结果如图5所示。

图5 传统PID和模糊PID性能比较
由图5两种控制结果比较系统阶跃响应曲线可以得到,通过模糊PID控制的方法,其静态误差明显小于传统PID控制方法。因此选用模糊PID控制器应用于无刷直流电机更为合理和有效。
2.3 控制模块仿真及结果
本文以MATLAB7.0为平台,利用Simulink搭建了系统仿真模型,对直流无刷电机控制系统建立模型,并对其运行,速度变化等情况进行仿真。对其速度环节进行传统PID及模糊PID控制的比较,根据直流无刷电机的特点建立如图6所示的仿真模型。
电机控制系统的原理:电源模块供电给MOSFET,由于MOSFET管承受短时过载能力比较小,需对功率MOSFET驱动设计保护电路,采用MOS驱动器的输出与MOS管之间串联电阻的方法,避免在功率管在导通和快速关闭时,由于漏极电压的震荡频率造成的di/dt过高而误导通的现象。如图三所示,R2~R6是MOSFET的门极驱动电阻。无刷电机与MOSFET连接,通过霍尔信号测试信号判断转子位置。根据原理建立了如图6所示的模型。整个电机控制系统采用双闭环调速控制方案:速度环节采用传统PID控制,电流环采用电流滞环调节方式。
利用MATLAB里的Fuzzy Logic Toolbox工具箱对速度环节进行模糊PID控制方式,它的输入为速度的误差及误差的变化量,调整各PID控制参数。如图7所示为模糊控制器的结构图。

图7 模糊PID控制结构图
利用上述模型进行仿真验证,速度还分别采用传统PID和模糊PID控制方式,初始转速为1000rad/s空载启动,系统稳定后,调节转速到500rad/s。得到如图8所示仿真波形,由图可知,模糊PID控制电机转速调控能力明显比传统PID优越。因此选用模糊PID控制电机转速更为合理和有效。

图8 行走控制仿真图
3 系统软件设计
系统设计中采用美国Keil Software公司的KeilμVision4集成开发环境,使用C语言进行程序设计。如软件流程图9所示,手持控制器和车载控制中心应用程序主要包括上述个电机驱动控制算法的实现函数、机器人行走控制算法函数、433 M无线模块数据通信的实现函数,CAN、IIC、uart网络数据通信实现函数,中断处理函数和各模块信息处理函数。
消防机器人和手持遥控器首先进行设备初始化,手持遥控器和消防机器人通过433 M无线模块进行无线连接,消防机器人等待接收来自遥控器的指令,进行指令检测处理,并进行信息反馈,根据遥控器的控制指令判断电机的动作,主要有3种指令:加减速/反转、制动、自然结束。手持遥控器主要进行发送指令以及接收指令的反馈在显示器上显示。
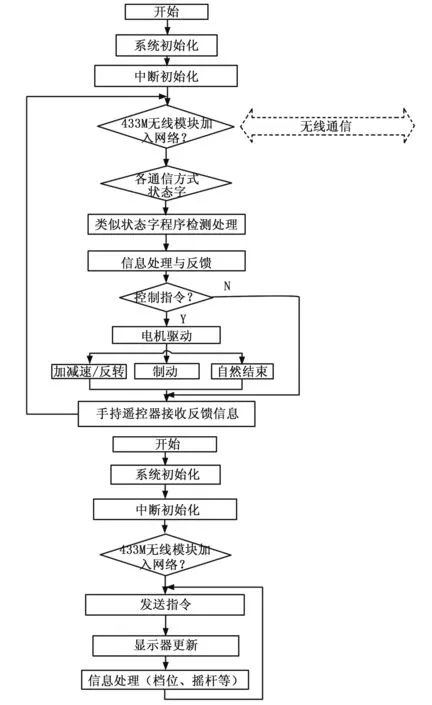
图9 系统软件流程图
在中断处理函数中只接收数据和设置相应的系统状态字。然后在主循环中循环监测相应的系统状态字,进行相应的信息处理和操作。
手持控制器和车载控制中心通过433 M无线模块进行通信,手持控制器传送指令,车载控制器进行信息的处理和反馈。行走控制模块监听控制信号,判断是否有控制信号,当监听到控制信号后,根据控制信号的控制指令,调用PID算法,调整PWM信号的占空比,将新的占空比赋给各个MOSFET功率管,产生相应动作指令。
4 测试效果与分析
经现场组装测试,消防机器人可以实现二维平面内任意方
向的移动功能包括直行、转弯、原地打转等全向移动,运行平稳且转向灵活。速度多档位可连续调控,可实现装配过程中的高精度定位,并具有一定的爬坡越障功能。手持控制器可以实时的显示车体运行状态信息,方便可靠。
5 结束语
消防机器人的研发有效保护消防人员的安全,在一定程度上阻止了火灾对消防人员的二次伤害。针对火灾现场的环境复杂性,本文设计了消防机器人的行走控制方案,通过设计电机驱动系统的硬件电路与针对行走控制系统进行MATLAB模拟仿真。在组装测试后,整个系统方案切实可行,方便可靠易于维护。
[1] http://mil.huanqiu.com/photo_china/2015-08/2791338.html[EB/OL].
[2] 范茂奎,杨千红,冯时进,等.我国消防员灭火救援中伤亡情况研究[J].工业安全与环保,2015(2):82-85.
[3] http://www.chinasafety.gov.cn/newpage/Contents/Channel_4976/2015/0814/256102/content_256102.htm[EB/OL].
[4] http://diyitui.com/content-1440086680.34157678.html[EB/OL].
[5] 周志毅.消防机器人在消防中的应用探讨[J].科技资讯.2014(4):16-17.
[6] 王乐临.爆炸物处理机器人控制系统设计与实现[D].合肥:中国科学技术大学,2010.
[7] 闻 名.无线遥控消防炮控制系统设计与实现[D].北京:中国科学院大学,2014.
[8] 尤 飞,蒋军成.城市消防安全前沿技术及研究进展-新型主动和被动消防技术[J].消防技术与科学.2010,29(6):457-462.
[9] Ho C C,Chen M C,Lien C H.2011.Machine vision-based intelligent fire fighting robot[J].Key Engineering Materials,450:312-315.
[10] 杨聪彬.高速履带与软地面附着特性与优化研究[D].北京:北京理工大学,2015.
[11] HO C C,Chen M C,Tsai T T.2011.Development of Scensory Fusion-Based Intelligent Fire Fighting Robot[J],Beijing:Advanced Science Letters,4:6-7.
[12] 袁 峥. 消防车智能监控系统研究与开发[D].郑州:郑州大学,2013.
[13] 杨 勇,邓成中.消防车用消防炮控制系统设计[J].消防科学与技术,2012,5(9):1-3.
[14] 姜 华.高空救援灭火机器人的设计[D].合肥:中国科学技术大学,2014.
[15] 王兴东,宴晚君,王 强,等.电动轮履两用救援灭火小车的创新设计[J].消防科学与技术,2012,31(1):68-71.
[16] 马洪雨,帕孜来,马合木提,等.基于单片机的电动摩托车无刷直流电机控制系统的设计[J].电子设计工程,2016,24(4):168-170.
[17] 贲礼进,陈继永,浦振托.基于永磁直流电机的工业缝纫机伺服控制系统设计[J].微电机, 2014,47(10):70-75.
[18] 任先进,马瑞卿,卢 颖,等.无刷直流电机在电动转辙机中的应用设计[J].微电机,2016,49(1):64-67.
Design and Implementation of Walking Control System for Fire Fighting Robot
Xu Lianwei,Wei Chongyu
(Qingdao University of Science & Technology, Qingdao 266061, China)
Fire accidents occurred frequently in recent years.,Fire safety problems can not be guaranteed. “Machine substitution”, this concept is an important means of disposal of fire rescue and development trend, the fire fighting robot research and development on the basis of effective relief to the safety of fire protection personnel. Aiming at the scene of the fire of the complexity of the environment,The hardware circuit of the motor drive system is designed and the MATLAB simulation is carried out for the walking control system. Implementation and optimization of the fire fighting robot obstacle avoidance and turning function. The main part of the motor drive and the whole system software design process. Through the test, to verify the reliability of the control scheme of walking.
fire fighting robot; walking control; MATLAB; PID; fuzzy PID
2016-07-18;
2016-08-17。
徐连伟(1990-),女,山东烟台人,硕士研究生,主要从事计算机通信网理论与技术方向的研究。
魏崇毓(1957-),男,江苏徐州人,博士,教授,主要从事通信与电子系统方向的研究。
1671-4598(2017)01-0066-04
10.16526/j.cnki.11-4762/tp.2017.01.019
TP24
A
