基于VB 6.0的自动分光光度计波长标定系统设计
2017-02-27晏健荣
晏健荣, 韩 强
(东华大学机械工程学院,上海 201620)
基于VB6.0的自动分光光度计波长标定系统设计
晏健荣, 韩 强
(东华大学机械工程学院,上海 201620)
为保证分光光度计波长检测的准确度,设计了光度计波长自动扫描标定系统。系统以STM32F103RBT6单片机为控制核心,通过控制步进电机、光电池检测模块、人机交互模块等部件,实现波长自动扫描检测。波长扫描过程中,光度计在波长每增加0.5nm处检测保存待测样品的吸光度值,并通过串口通信与计算机交互,再将检测数据上传至VB上位机软件。上位机完成对检测数据的处理及曲线绘制。根据检测结果,利用正弦函数拟合校正波长脉冲函数,并将校正系数下发至下位机。下位机根据校正系数,完成波长标定。标定系统波长扫描范围为190~850nm,扫描检测速度为2nm/s。校正后,实际测量数据检验结果表明,分光光度计波长准确度优于0.3nm。
波长标定;拟合;VB6.0;光栅;单片机;上位机;分光光度计
0 引言
分光光度计主要根据物质吸收光谱上某波长处的吸光度值来判断或测定待测物含量[1],被广泛应用于制药、化学化工、冶金、食品、农业等领域的定性、定量分析[2]。不同物质有其特定的吸收光谱线,在实际测量中,根据不同的物质,选用不同的波长。波长准确度直接关系到分光光度计的分析误差[2-3]。
近年来,由于电子技术的高速发展,光电检测技术对仪器的分辨率、测量范围、灵敏度、速度、集成化、一体化等方面提出了更高的要求[4]。提高波长标定的扫描速度和精度是分光光度计控制系统设计的主要任务。目前,波长标定主要有根据扫描结果在一定区间内线性加减脉冲数和多项式拟合[4-5]两种方法。线性地加减脉冲数,误差较大,标定过程复杂;多项式拟合精度较高,但要求拟合的数据点较多。本系统通过cortex-M3芯片控制各部件电机及光电池检测系统等模块,实现自动扫描检测,大大简化操作流程;VB上位机根据扫描结果,利用正弦函数进行拟合。光栅方程符合正弦规律,用较少的标定点数获得较高精度的波长脉冲函数,可有效提高系统的实时性及检测精度。
1 标定系统结构及原理
1.1 系统结构
分光光度计下位机主要包括cortex-M3主控制单元、光源系统、光栅分光系统、样品池、滤光片、光电池检测系统以及人机交互模块等。上位机为VB设计的软件程序,主要完成数据的处理、显示及拟合等。标定系统结构如图1所示。

图1 标定系统结构框图
下位机控制单元选用STM32F103RBT6作为主控芯片。光源系统包括氘灯、钨灯及光路系统。系统可根据波长自动切换光源,切换时由步进电机驱动切换镜片将指定光源反射至入射狭缝。分光系统采用平面反射闪耀光栅作为分光元件,光栅相对于棱镜有更好的分光能力[6]。光栅由步进电机及其减速传动装置带动旋转,选择特定波长的单色光出射。光栅步进电机选用STP-42D2081,步距角为1.8°。为提高光栅角度分辨率,电机驱动时采用64细分,同时设计机械细分,设计减速传动比为两级齿轮减速传动机构。为克服衍射光栅光谱的级次重叠,在出射单色光前加有7个不同波段截止滤光片。截止滤光片安装在可由步进电机驱动的圆盘孔位上。步进电机选用力矩较大的24BYJ48B减速步进电机。样品池中放有待测物质的样品及用作参照对比的“空白”样品。“空白”样品中没有待测物,用以消除待测物质以外其他物质的影响。样品池用35BYJ412B步进电机进行样品切换,使单色光依次通过各样品。检测系统采用光电池传感器和放大模块,完成对透射光能量的检测。
光栅将复色光分成各波长单色光,特定波长单色光通过样品池中样品,经光电池检测透射光能量。通过计算待测物样品和“空白样品”两种样品透射光能量的比值,得到待测物质的透过率及吸光度。
根据光栅衍射理论,平面反射光栅的光栅方程为:
mλ=d(sinα-sinβ)
(1)
式中:d为光栅常数,设计理论值为833.33;α为入射光与光栅法线夹角;β为衍射光与光栅法线夹角;m为光栅衍射光谱级数,选用m=1级光谱;λ为衍射光波长。
由光栅方程可知,波长为λ的一级(m=1)光谱线、波长为λ/2的2级光谱线、波长为λ/3的3级光谱线等都具有相同的衍射角。为消除光谱级次重叠,保证单色光纯度,在出射光前加有截止滤光片。根据截止滤光片,将波长分成190~339 nm、340~369 nm、370~429 nm、430~549 nm、550~649 nm、650~749 nm、749~850 nm多段进行扫描。系统选用能量较高的m=1级光谱,则:
λ=d(sinα-sinβ)
(2)
根据三角函数变换,可得:
(3)
对于分光光度计,入射狭缝A及出射狭缝B固定,闪耀反射光栅分光原理如图2所示。

图2 闪耀反射光栅分光原理图
光栅旋转所选择的入射单色光光线与出射单色光光线夹角始终不变,(α+β)为常数。零级光处,入射角与衍射角相等,α-β=0。光栅旋转一定角度θ时,α-β=2θ,则式(2)可简化为:
λ=ksinθ
(4)

结果评价:课程前后询问学生对老年护理职业岗位认同的相关问题。统计2010、2011级学生毕业论文中开展老年护理研究的学生比例。护理职业岗位胜任力共有8项,其中关爱、沟通与合作、评判性思维、伦理素养、恪尽职守、终身学习、一般护理技术按5分制计分,每项分别对应1、2、3、4、5分的评分标准进行描述,得分根据小组学习、学生课堂、课外训练任务中学生的表现和成果评价,评价结果由学生自评、学生互评、教师评价3部分组成。基本知识通过考核评价。
λ=k1sin(n/k2)
(5)

在实际测量过程中,由于分光光度计的安装误差、光栅误差等因素使(α+β)的常数与理论值产生偏差,也将引入由齿轮制造的误差,从而导致系数k1、k2的误差,最终使电机脉冲数产生偏差,从而影响分光光度计的波长准确度。为保证波长的准确度,必须根据实际分光光度计,对系数k1、k2重新计算。系统通过测定氧化钬玻璃的特征谱线,并根据其特征波长及对应实际脉冲数,采用正弦函数最小二乘拟合,得到实际系数k1、k2。分光光度计下位机根据实际系数重新完成波长标定。
2 VB上位机
由于波长扫描标定时检测处理的数据量较大,为提高系统的数据处理能力及运行效率,设计VB上位机软件。上位机与下位机通过RS-232通信,实现数据交互。下位机分光光度计负责波长扫描检测,上位机软件主要实现数据处理、曲线绘制、数据管理、存储、excel表格输出以及正弦函数拟合校正等。
上位机选择指定的波长段并开始采集。下位机接收扫描指令后,对指定的波长段自动扫描检测,并将检测的各待测物质的透过率及对应的波长值通过串口通信传至上位机。上位机将数据显示在对应的表格中,并绘制对应的波长透过率曲线。同时可对检测数据进行存储及输出。所有波长段检测完成后,即可进行波长校正。波长校正时,上位机根据检测数据,找到实际特征波长的波长值及对应电机脉冲数。根据氧化钬玻璃的标准特征波长及脉冲数,利用正弦函数进行拟合校正,得到校正系数k1、k2,将系数下发给下位机。下位机再根据校正系数重新计算得出每个波长对应的脉冲数,完成波长标定。
3 波长标定
波长标定过程中,由于截止滤光片的不同,需分波段进行扫描。VB上位机选择不同的波长段,下发至下位机。下位机根据上位机指令,控制光栅电机带动光栅旋转,对指定波长段扫描标定。下位机接收指定波长段扫描指令后进行初始化。初始化主要包括根据波长自动选择光源及截止滤光片、样品池电机带动样品池回零,使空白样品至指定工位。选择合适的波长放大倍数,提高系统检测精度。
初始化完成后,在光栅电机的作用下,光栅以一定的角速度旋转,使光栅出射的单色光以2nm/s的扫描速度先后通过“空白”样品及待测物样品。为提高系统的运行效率及实时性,同时减少数据量,只在波长值每增加0.5nm处读取光电检测器的输出值,并将结果存储。通过对空白样品及标准样品检测结果的对比,即可得出标准物质对不同波长的透过率,最后将扫描结果传给上位机。
由于系统检测数据是在扫描过程中动态检测的,为提高系统的检测精度,本系统采用中位值平均滤波与滞后滤波软件滤波相结合的方法。每次采集8组波长数据,去掉最大值与最小值,再求平均值。在每组数据采集过程中,连续采样18次,去掉最大值与最小值,取平均值,再根据上一组数据,采用一阶滞后滤波,得到当前数据。
AD_data=(data1×20+80×data0)/100。
自动波长标定系统流程图如图3所示。
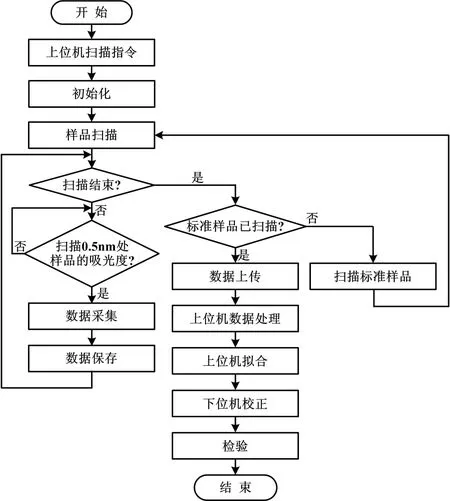
图3 标定系统流程图
特征波长扫描检测结果如表1所示。

表1 特征波长扫描检测结果
根据检测特征波长及对应的实际脉冲数,采用正弦函数λ=k1sin(n/k2),拟合校正得到k1=1 544、k2=31 455,则λ=1 544sin(n/31 455)。
校正结束后,经过检验测量,得到实际特征波长值如表2所示。

表2 标定结果测试检验
试验数据表明,系统测量波长误差小于0.3 nm。系统标定后,用分光光度计自带氘灯校正波长。根据氘灯特征谱线,其特征波长为486 nm和656.1 nm,检测实际波长为486 nm和656 nm。
波长重复性与波长准确度同样重要。对于同一物质,不同波长下测试会有不同的灵敏度。波长重复性不好的分光光度计在每次试验检测时,将不能得到可靠的分析结果。为检测波长重复性精度,多次扫描检测氧化钬玻璃特征谱线,测定系统波长重复性。经过系统4次扫描测量,得到的特征波长处波长重复性检测结果如表3所示。

表3 波长重复性检测结果
试验数据表明,特征波长处波长重复性优于0.3 nm。
4 结束语
基于VB 6.0的自动分光光度计波长标定系统[7-10],通过上位机正弦函数拟合校正,获得了较高的波长准确度。通过设计上位机数据处理软件,提高了系统的运行速度及效率,友好的上位机界面能更加直观地显示测量的结果;通过步进电机带动分光光度计各部件自动扫描检测,提高了系统的智能化与自动化,大大简化了测量操作,并保证了系统的准确性与可靠性。通过试验检测表明,经系统波长校正后的分光光度计,其波长准确度优于0.3 nm,满足分光光度计试验检测要求。
[1] 李昌厚.紫外可见分光光度计及其应用[M].北京:化学工业出版社,2010.
[2] 李昌厚.紫外可见分光光度计(分析仪器使用与维护丛书)[M].北京:化学工业出版社,2005.
[3] 乔道鄂,谷玉海.自动光栅单色仪波长标定技术[J].仪表技术与传感器,2009(3):118-120.
[4] 乔道鄂,谷玉海,徐小力.自动扫描多光栅单色仪系统研制[J].仪器仪表学报,2009,30(3):668-672.
[5] 杨家健,卢小丰,冯晓东,等.基于LabVIEW的光栅单色仪波长标定装置[J].电子测量技术,2010,33(4):78-81.
[6] 吴文铭.紫外可见分光光度计及其应用[J].生命科学仪器,2009,7(4):61-63.
[7] ROBERT Y C,STEPHEN S M,ANDREA B M.Spectrometer wavelength calibration using spectrally resolved white-light interferometry[J].Optics Letters,2010,35(13):2257-2259.
[8] 郑建英,马龙博.基于VB6.0的智能化仪表远程监控系统设计与实现[J].制造业自动化,2008,30(10):94-95,111.
[9] 张磊,戴景民.基于连续光谱光源的单色仪标定方法[J].光谱学与光谱分析,2015,35(8):2348-2351.
[10] 宋勇,李清宝,白燕,等.高精度实时数据采集系统的实用设计[J].微计算机信息(测控自动化),2005,21(6):66-68.
WavelengthCalibrationSystemofAutomaticSpectrophotometerBasedonVB6.0
YANJianrong,HANQiang
(CollegeofMechanicalEngineering,DonghuaUniversity,Shanghai201620,China)
Toensuretheaccuracydetectionofthewavelengthofspectrophotometer,anautomaticscanningcalibrationsystemisdesigned.ThesinglechipcomputerSTM32F103RBT6isusedasthecontrolcore,throughcontrollingthesteppermotorofeachpart,photovoltaicdetectionmodule,andmanmachineinteractionmodule,etc.,theautomaticscanningdetectionofwavelengthisimplemented.Inwavelengthscanningprocess,theoutputvalueofthephotodetectorisreadandsavedbyspectrophotometerwhenthewavelengthincreasesevery0.5nm;andthedetecteddataisuploadedtoVBhostcomputerthroughserialcommunication.Theprocessingandcurveplottingofthedetecteddataarecompletedbythehostcomputer,usingthesinefunctiontofitandcorrectthewavelengthpulsefunction,andthecorrectioncoefficientsareissuedtothelowercomputer.Thewavelengthcalibrationiscompletedbylowercomputeraccordingtothecorrectioncoefficient.Thetestresultsofactualmeasurementshowthattheaccuracyofthewavelengthofspectrophotometeriswithin0.3nm.
Wavelengthcalibration;Fitting;VB6.0;Grating;Microcontroller;Hostcomputer;Spectrophotometer
晏健荣(1991—),男,在读硕士研究生,主要从事机电一体化集成控制技术的研究。E-mail:dhujr_yan@163.com。韩强(通信作者),男,博士,副教授,主要从事机电一体化集成控制技术、机械电子、智能检测与控制等的研究。E-mail:hanq@dhu.edu.cn。
TH74;TP
ADOI: 10686/j.cnki.issn1000-0380.201701022
修改稿收到日期:2016-10-10
