LabWindows/CVI在导引头地面测控设备中的应用
2017-02-27贺向东韩连刚桂苏嘉
王 珂,贺向东,齐 鑫,韩连刚,桂苏嘉
(中国航天科技集团公司第四研究院第四十一研究所,西安 710025)
LabWindows/CVI在导引头地面测控设备中的应用
王 珂,贺向东,齐 鑫,韩连刚,桂苏嘉
(中国航天科技集团公司第四研究院第四十一研究所,西安 710025)
针对某型导引头挂飞试验实现导引头控制及实时性高的需求,设计了一种基于LabWindows/CVI软件开发平台的挂飞控制箱系统;该挂飞控制箱通过RS422串口与导引头相连,能够实现导引头控制、状态显示、GPS信息接收处理、试验数据存储等功能;挂飞控制箱采用VXI总线和LabWindows/CVI软件平台进行设计,硬件集成度较高,软件运用LabWindows/CVI开发平台自带的多线程技术,将串口通讯等周期性任务与数据处理、存储、显示等任务从时间上分开,提高了CPU工作效率,满足系统实时性要求;试验结果表明,该挂飞控制箱系统工作稳定,与导引头通讯可靠,实时性较高,试验数据完整且满足总体要求。
LabWindows/CVI;挂飞控制箱;导引头
0 引言
某型导引头挂飞试验是将电视成像导引头安装在运输机腹部以模拟导弹飞行状态,运输机以一定高度和速度接近地面设定好的固定或移动目标,测试人员在运输机上通过挂飞控制箱控制导引头对目标进行搜索或跟踪,从而检验导引头在规定能见度和视场角条件下,对预定目标探测识别的能力。在整个试验过程中,挂飞控制箱必须实现的功能包括:接收和储存GPS信息、便携式操控台指令;导引头参数装订;向导引头发送控制指令;接收、存储导引头反馈信息等,这就对挂飞控制箱提出了实时性强、功能全、速度快、可靠性高等要求。
本文根据挂飞控制箱的设计要求,采用Labwindows/CVI软件开发平台,基于多线程处理技术和多方控制信息融合技术,设计了一种实时性强,可靠性高的处理系统,取得了很好的试验效果。
1 系统方案设计
1.1 系统组成
某型导引头挂飞试验系统由挂飞平台、挂飞空中设备和地面保障设备三大部分组成,其中挂飞平台为某型运输飞机,挂飞空中设备包括某型号导引头、UPS电源、挂飞控制箱、便携式控制台、监视器、导引头图像记录仪、GPS装置和导引头挂架等,地面保障设备包括靶标、通讯设备、照相及摄像设备等,详见图1。
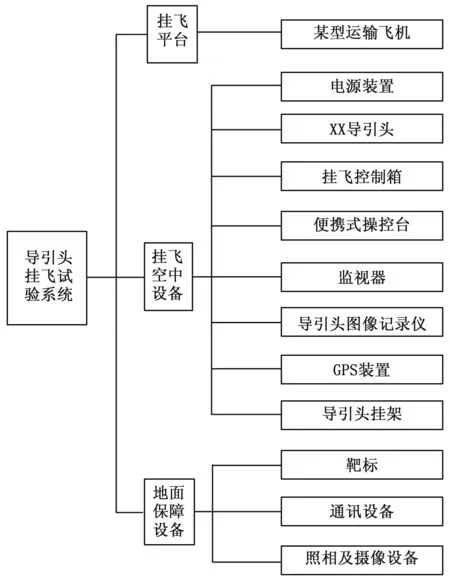
图1 导引头挂飞试验系统组成
1.2 系统信息交互关系
在飞行试验中,挂飞控制箱与其他部件的信息交互关系如图2所示,可以看出,挂飞控制箱的主要接口及功能包括:
1)通过UPS电源进行供电,电压220 V;
2)与GPS装置通过RS232方式进行通讯,通讯周期100 ms,GPS装置实时发送导引头当前时刻的位置及速度信息,挂飞控制箱根据导引头及目标的当前位置信息进行解算,以确定搜索阶段导引头光轴俯仰和方位角;
3)与便携式控制台通过RS422方式进行通讯,通讯周期20 ms,在手动搜索模式时,试验人员通过操作便携式控制台上的摇杆控制导引头光轴方向,挂飞控制箱收到便携式操控台的控制帧并向导引头转发。
1.3 挂飞控制箱硬件结构
挂飞控制箱采用VXI总线和LabWindows/CVI软件平台进行设计,系统集成度较高。系统硬件部分主要由工业控制计算机、多串口卡、显示器、键盘/鼠标组成,硬件结构见图3。
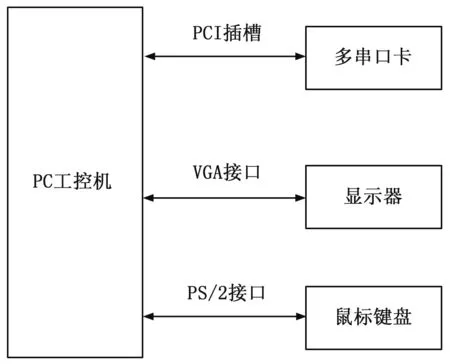
图3 挂飞控制箱硬件结构图
其中工业控制计算机的主要性能包括:处理器Intel P4,主频1 GHz以上;内存256 MB以上;硬盘80 GB以上;2个PCI插槽;显存不小于32 MB。
多串口卡型号为MOXA 134U,主要性能包括:串口数量4个,串口标准为2XRS-232/422/485,2XRS-422/485;最大板载数4个;通讯控制器MU860;总线32位Universal PCI;波特率50 bps~921.6 Kbps;供电+5 V,180 mA。
2 系统软件设计
LabWindows/CVI适用于采用VXI总线和插入式板卡的测控系统,采用ANSI C编译器,具有强大的的函数库、先进的多线程技术和丰富的界面组件,具有开发方式简单灵活,研制周期短等优点[1-3]。
2.1 LabWindows/CVI多线程技术
新乡贤统战:基层统战工作的整合拓展与全新模式——以浙江省县以下实践为案例 ……………………………………………… 许 军(4·76)
线程(thread) 是进程中单一顺序的控制流,运行在进程空间内,是进程中的实体。一个进程中可以存在多个线程,多个线程共享进程的内存空间,从而实现程序的并发执行。进程一般由主线程和辅助线程组成,主线程由系统生成,用于创建、显示和运行用户界面,辅助线程由用户进行开发,包括线程池(thread pools)和异步定时器(asynctimer)两种方式。线程池采用单独的线程缓存使创建和销毁线程的开销最小化,适合于执行多次或一个循环内执行的任务; 异步定时器使用Windows多媒体定时器运行定时器回调函数,适合于定期进行的任务[4-6]。
2.2 系统的多线程应用
一般主线程由系统生成,完成对用户鼠标键盘操作的响应,以及用户界面的生成、显示和刷新等。除主线程外还创建了2个辅助线程。一个辅助线程通过调用异步定时器函数NewAsyncTimer生成,定时周期20 ms,主要完成串口通讯等周期性任务;另一个辅助线程通过调用CmtScheduleThreadPoolFunction函数生成,主要用来执行数据处理、存储和显示等任务,系统软件结构图见图4。
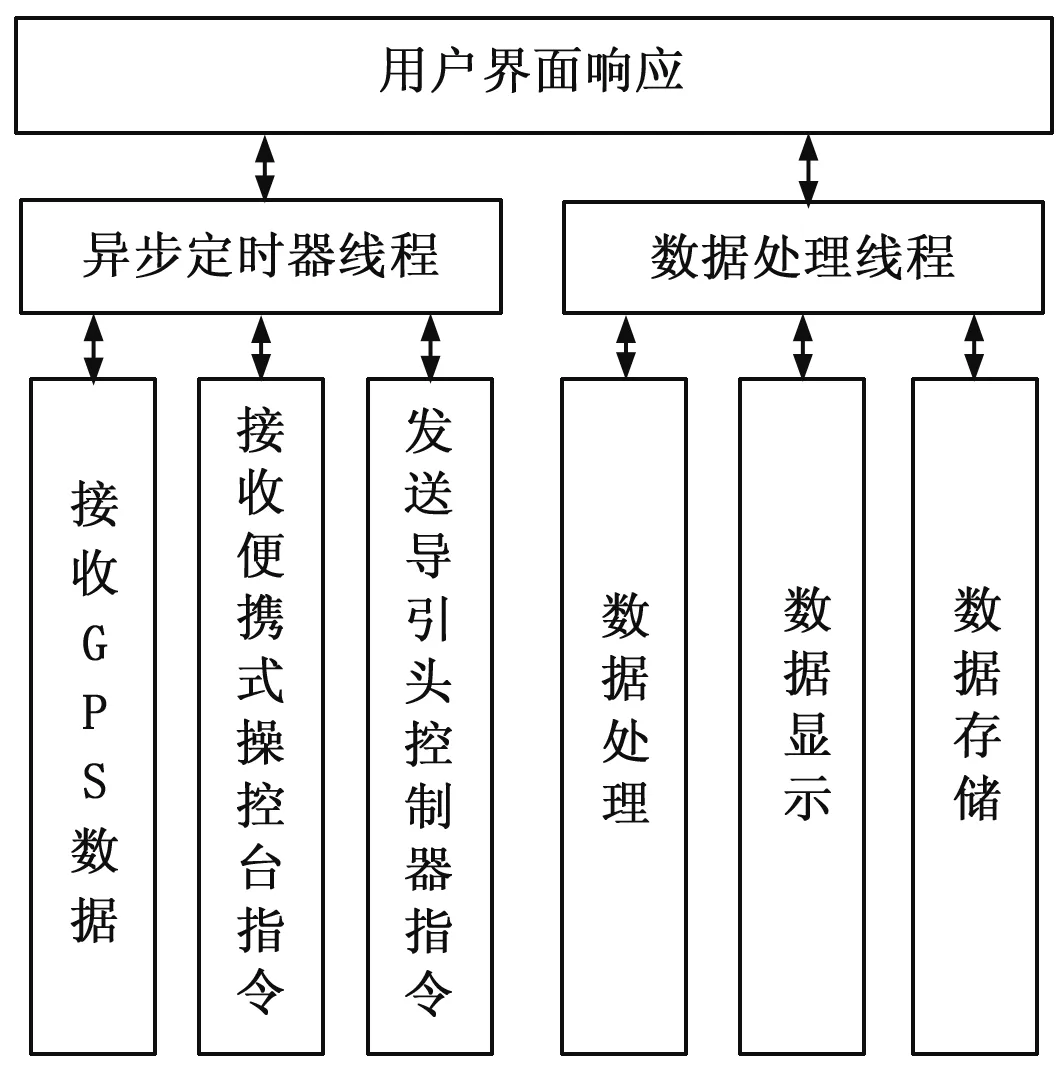
图4 系统软件结构图
2.3 系统工作流程
挂飞控制箱软件工作流程如图5所示,软件通过响应用户界面操作向导引头发送参数装订信息和导引头控制指令,同时实时接收GPS装置发出的导引头当前时刻的位置及速度信息,根据导引头及目标的当前位置信息进行解算,以确定搜索阶段导引头光轴俯仰和方位角,目标进入导引头视场后操作员通过操作手柄进行目标锁定,进行锁定目标飞行,同时验证导引头各项性能指标。
挂飞控制箱在导引头挂飞试验中的主要工作内容包括:
1)系统上电完成,进入挂飞控制箱软件后,按下“开始测控”按钮,系统开始周期性接收GPS数据和导引头状态信息,对数据进行处理并在界面上显示;
3)自动搜索阶段试验人员输入搜索模式和搜索参数等信息,系统根据实时的导引头位置和目标位置生成搜索指令,通过串口周期性的发送给导引头;
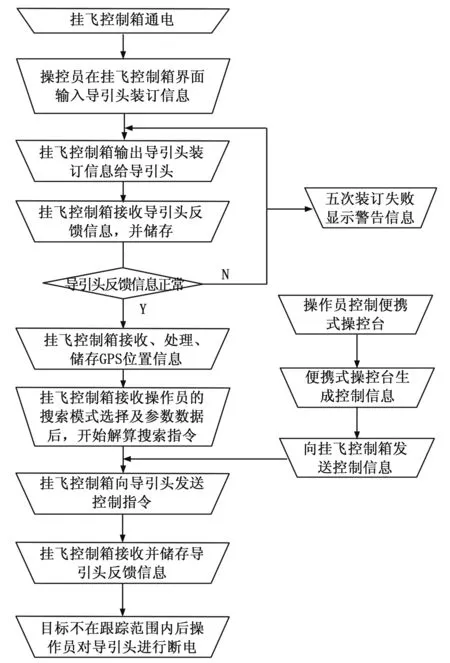
图5 挂飞控制箱工作流程图
4)手动搜索阶段试验人员通过操纵便携式控制台生成控制指令,并通过挂飞控制箱将指令发送至导引头,试验人员可
以完成目标跟踪、锁定、解锁等控制指令;
5)目标超出导引头跟踪范围后退出软件,挂飞控制箱断电。
3 结论
本文基于LabWindows/CVI软件开发平台和VXI总线设计了导引头挂飞试验的控制设备—挂飞控制箱,该挂飞控制箱能够接收和储存GPS信息,接收便携式操控台指令,完成导引头参数装订;向导引头发送控制指令,接收、存储导引头反馈信息等。目前该挂飞控制箱已经成功参加某型导引头挂飞试验,试验过程中,挂飞控制箱工作稳定,与导引头、便携式操控台、GPS接收机等设备匹配工作正常,试验数据完整且满足总体要求。
[1] 王瑜瑜. 基于Labwindows/CVI飞机气动系统自动测试平台的设计与实现 [J].电子器件,2015, 38(5): 1159-1163.
[2] 孙新川,仲 秦,范蟠国.LabWindows/CVI和PLC技术下的飞机电负载系统设计[J].设计与研究,2005(2):14-18.
[3] 唐 疑,张劳模,庄昌兮.基于LabWindows/CVI的辐射仪虚拟检测系统[J].仪表技术与传感器,2001(7):28-29.
[4] 王 瑜,罗庚合. 基于LabWindows/CVI的多传感器自动化全量程扭矩检定仪设计[J].煤矿机械, 2011,32(10):179-180.
[5] 薄志峰.基于LabWindows/CVI的电动舵机自动化测试系统设计[J].国外电子测量技术,2015,34(5):66-69.
[6] 谭秀萍,吴晓辉,范蟠果,等. LabWindows/CVI多线程技术在电负载系统中的应用[J].测控技术,2011,30(8):79-90.
Application of LabWindows/CVI in Ground Measurement and Control Equipment of Seeker
Wang Ke, He Xiangdong, Qi Xin, Han Liangang, Gui Sujia
(CASC, Fourth Research Institute,Xi’an 710025, China)
For the demand of the seeker flying test achieving control and high real-time, it designs the control box system based on LabWindows/CVI software development platform. The flying control box are connected to seeker through RS422 serial ports, it can achieve seeker control, state display, receiving and processing of GPS Information, test data storage,and other functions. Flying control box is designed based on VXI bus and LabWindows/CVI software platform. The software uses multithreading technology of LabWindows/CVI software development platform, it divides periodic tasks such as serial ports from data processing, storage, display and other tasks on time, improves the CPU efficiency. The test results show that the flying control system works steadily, communicates reliably with seeker, gets test data completely and meeting the general requirements.
LabWindows/CVI;flying control box;seeker
2016-07-30;
2016-09-13。
王 珂(1987-),男,陕西富平人,硕士,主要从事地面测控设备方向的研究。
1671-4598(2017)01-0091-03
10.16526/j.cnki.11-4762/tp.2017.01.026
TP3
A
