车载OFDM通信系统中结合后训练序列的判决反馈信道估计方法
2017-02-24邓贤君
王 彦,邓 姣,王 超,邓贤君
(南华大学 电气工程学院,湖南 衡阳 421000)
车载OFDM通信系统中结合后训练序列的判决反馈信道估计方法
王 彦,邓 姣,王 超,邓贤君
(南华大学 电气工程学院,湖南 衡阳 421000)
针对具有较大多普勒扩展和时延扩展的车载通信环境,利用后训练序列信道响应携带的信道变化信息,提出一种结合后训练序列的判决反馈信道估计方法。该方法采用最小二乘算法估计后训练序列的信道响应;对前一个正交频分复用(orthogonal frequency division multiplexing, OFDM)符号和后训练序列的信道响应估计值进行系数加权求和来估计当前OFDM符号的信道响应,并利用其4个导频子载波的信道频率响应关系自动获取加权系数;最后,对获得的信道响应估计值进行判决反馈和低通滤波以降低噪声影响。仿真结果表明,与目前取得较好性能的STA(spectral temporal averaging)方法、CDP(constructing data pilot)方法和结合平滑滤波的判决反馈信道估计方法相比,所提方法具有更优的误包率性能。
车载通信;后训练序列;信道估计;正交频分复用(OFDM);判决反馈
0 引 言
近年来,汽车的普及和其数量的急剧增长引发了许多交通问题。车辆自组网(vehicular ad-hoc network,VANET)通过车辆与路边基础设施之间(vehicle to infrastructure,V2I)、车辆与车辆之间( vehicle to vehicle,V2V)的无线通信,能有效地缓解交通拥堵,降低交通事故发生率,在智能交通领域有着广阔的应用前景而备受关注。
VANET物理层是基于IEEE 802.11p标准[1],采用OFDM(orthogonal frequency division multiplexing)调制技术。对OFDM通信系统而言,信道估计至关重要,精确的信道估计不仅可以降低后续均衡过程的复杂度,还能提高系统整体性能。然而,在实际车载环境中,由于车辆的移动性,较大多普勒扩展和时延扩展的存在使得车载信道呈现出很强的时变性[2],这在一定程度上会加大信道估计的难度。另外,IEEE802.11p是在无线局域网标准IEEE802.11a的基础上作了部分修改而制定的,其导频结构与IEEE802.11a完全相同,这种导频结构在相对稳定的室内环境能完全胜任,但对于具有较大多普勒扩展和时延扩展的时变车载信道来说,并不满足奈奎斯特采样定理。研究也表明IEEE802.11p标准中采用的基于前导长训练序列的最小二乘(least squares,LS)信道估计算法并不能有效地跟踪到信道的快速变化[3],导致系统性能急剧下降,难以满足行车安全应用的需求。
对此,学者们进行了大量的研究,并提出了多种改进的信道估计方法,主要分为修改导频结构[4-6]和保持导频结构不变[7-11]两大类。在修改导频结构的信道估计方法中,文献[4]通过在循环前缀中插入伪随机序列(pseudo-noise sequence,PN),提出一种时域LS信道估计算法,在30 km/h情况下能获得较低的误比特率;文献[5]提出在数据符号间周期性地插入mid-amble训练序列以确保更长数据包的传输,但该方法需要在训练序列插入率和系统性能之间进行折衷;文献[6]提出在数据包尾部插入后训练序列来降低基于广义离散椭球序列的迭代信道估计算法的复杂度,但实现难度仍然很大。另一类保持导频结构不变的信道估计方法中,基于判决反馈的信道估计方法[7]利用判决得到的数据符号进行重新调制和均衡来更新信道估计,能有效地降低误包率,提高OFDM系统性能,但由于随机噪声的存在,数据符号可能会出现判决错误,引起错误传播。为此,一系列基于判决反馈的改进方法被提出,如STA(spectral temporal averaging)方法[8]、CDP(constructing data pilot)方法[9]、时频域信道估计方法[10]和结合平滑滤波的判决反馈信道估计方法[11]等,并都取得了较好的性能。
后训练序列处于数据包的尾部,相比于前导训练序列的初始信道估计值,后训练序列的信道响应本身就携带了信道变化信息[12]。为了进一步提高信道估计的精度,本文提出一种结合后训练序列的判决反馈信道估计方法。不同于现有改进的判决反馈信道估计方法,新方法需引入后训练序列,并联合前一个OFDM符号和后训练序列的信道响应来估计当前OFDM符号的信道响应。仿真结果表明,与现有改进的判决反馈信道估计方法相比,所提方法具有更优的误包率性能。
1 系统模型
1.1 物理层结构
车载通信系统物理层采用OFDM调制技术,工作在5.9 GHz频率附近,带宽为10 MHz,根据调制方式和编码速率的不同,可支持3 Mbit/s~27 Mbit/s的数据速率。
图1为发送的数据包结构,包括训练序列、信令段和数据段3个部分。训练序列由10个短训练序列t1~t10和2个长训练序列T1~T2构成,短训练序列用于频率粗同步,长训练序列用于信道估计和频率精同步。保护间隔(guard interval,GI)的插入是为了对抗多径时延扩展引起的符号间干扰。信令段由一个OFDM符号构成,用于传递后续数据符号的调制类型、编码速率和数据长度等信息。

图1 数据包结构Fig.1 Packet structure
在发送端,首先对数据流进行卷积编码用于前向纠错,并根据编码速率(如2/3,3/4)的需要进行“打孔”。然后送入交织模块以消除深衰落引起的突发性错误,再选择合适的调制方式进行星座映射,如二进制相移键控(binary phase shift keying,BPSK)、正交相移键控(quadrature phase shift keying,QPSK)、十六进制正交幅度调制(16 quadrature amplitude modulation,16QAM)或64QAM。接着执行64点离散傅里叶逆变换(inverse discrete Fourier transform,IDFT)来实现OFDM调制。64个OFDM子载波包括48个数据子载波、4个导频子载波和12个虚子载波。其中,4个导频分别位于编号为-21,-7,7和21的子载波上,用于补偿剩余频率偏移引起的相位旋转。最后,插入循环前缀、进行并串变换,并添加序头送到无线信道中进行传输。
一般而言,OFDM系统中的子载波间干扰(inter carrier interference,ICI)是由信道冲击响应的时变性引起的。当归一化多普勒带宽远小于归一化子载波带宽时,ICI污染小于噪声水平,在接收端可当做加性噪声进行处理[13]。该条件在车载环境下完全满足,因此,在串并变换、移除循环前缀和离散傅里叶变换(discrete Fourier transformation,DFT)后, 接收到的第i个频域OFDM信号可表示为

(1)
(1)式中:X(i,k),H(i,k)和W(i,k)分别表示发送的OFDM符号、信道冲击响应和加性高斯白噪声(additive white Gaussian noise,AWAN)的频域表示,其中,i(1≤i≤M)为OFDM符号索引,k(0≤k≤N-1)为子载波索引,M是数据包中数据OFDM符号的个数,N=64。
接着在接收端提取出2个长训练序列符号Y(T1,k)和Y(T2,k),并采用LS信道估计算法进行信道估计。由于发送端发送的2个长训练序列相同,采取求平均操作以降低噪声影响,如
(2)
IEEE802.11p标准中假设信道在整个数据包传输过程中拟平稳,通过(2)式获得的信道频率响应估计值将用来均衡整个数据包,如
(3)
此后的处理过程(包括移除导频、并串变换、解映射、解交织、去打孔和译码)都与发送端相反。
1.2 车载信道模型
为了便于通过仿真评估车载通信系统的性能,研究者针对车载环境开展了大量实地测量活动,并提出了多种车载无线传播信道模型,主要分为基于几何随机模型[14](geometry-based stochastic models,GSCMs)、光线追踪模型[15](ray-based model)和抽头延迟线模型(tap delay model, TDL)3类。
本文选取复杂度较低、易于实现的TDL模型进行信道建模。对于TDL模型而言,不同的车载环境所对应的最大多普勒扩展、可辨多径数及每一径的功率、衰落分布、多普勒谱分布会有所不同。文献[16]给出了6种不同场景下的TDL信道模型及其具体信道参数,本文选取高速车车通信(VTV-expressway oncoming) 、城市车车通信(VTV-urban canyon oncoming)和郊区车路通信(RTV-suburban street)3种场景进行仿真。这既包括了V2V和V2I 2种通信模式,又覆盖了高速、郊区和城市3种车载环境,具有代表性。
2 车辆移动性对OFDM系统的影响
在车载环境下,由于车辆的移动性,车载信道会呈现出很强的时变特性,通常用相干时间Tc表示
(4)
(4) 式中:fc为载波频率(5.9 GHz);v和c分别表示相对车速和光速。从(4)式可知,随着v的增大,相干时间会减小,信道的快衰落特性也越明显。
图2给出了高速车车通信场景下,采用QPSK调制方式和20个OFDM符号时,信道频率响应随OFDM符号的变化情况。从图2可以看出,信道响应的幅度和相位会在数据包传输过程中发生快速地变化,引起符号间选择性衰落。以相位为例,在15号子载波处,第1个OFDM符号和最后1个OFDM符号的信道频率响应的相位分别为2.4和-1.8,在信道估计过程中,若近似认为这2个OFDM符号的信道频率响应相等(即标准中基于前导训练序列的LS信道估计算法),在解调过程中肯定会出现解映射错误,并且随着数据包中OFDM符号数目的增大,后续OFDM符号与第1个OFDM符号的信道频率响应差距越大,系统性能会急剧下降。因此,有必要提出一种在车载环境下能不断动态更新信道响应的信道估计方法。
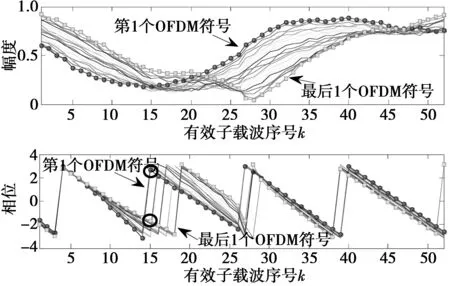
图2 信道频率响应随OFDM符号变化情况
3 结合后训练序列的判决反馈信道估计方法
为了支持OFDM系统中的高速移动终端,判决反馈信道估计方法在文献[7]中被提出。该方法利用解映射硬判决得到的数据进行重新调制和均衡来更新信道响应,在高信噪比下能获得较好的误比特率性能,因而也成为车载通信系统中许多信道估计方法的改进基础。然而在实际车载环境中,信道的变化具有随机性,现有改进的判决反馈信道估计方法仅利用前向OFDM符号获得的信道估计值来更新后续OFDM符号的信道响应,难以有效地跟踪到信道的快速变化。后训练序列位于数据包的尾部,相对于前导长训练序列的信道响应估计值,后训练序列的信道响应估计值本身就携带了信道变化信息。因此,本文提出在数据包尾部添加一个与长训练序列相同的后训练序列(在报头的保留位中声明),通过联合前一个OFDM符号判决反馈、低通滤波所获得的信道响应估计值和后训练序列处的LS信道估计值来更新当前OFDM符号的信道响应,即结合后训练序列的判决反馈信道估计方法。
3.1 基本原理
所提信道估计方法结构如图3所示,首先采用LS算法估计后训练序列的信道响应;然后对前一个OFDM符号和后训练序列的信道响应估计值进行系数加权求和来估计当前OFDM符号的信道响应,并利用这3个OFDM符号中4个导频子载波的信道频率响应关系自动获取加权系数;最后对获得的信道响应估计值进行判决反馈和低通滤波以降低噪声影响。

图3 结合后训练序列的判决反馈信道估计Fig.3 Decision-directed channel estimation with postamble
该方法具体分为以下4个步骤。其中,P表示位于-21,-7,7和21号子载波处的导频符号集合;D表示位于48个数据子载波上的数据符号集合;U表示P与D的并集;Γ={1,2,…,M}表示OFDM符号集合。
(5)(5)式中:Y(post,k)表示接收端接收到的后训练序列;X(post,k)是已知的后训练序列。
步骤2 系数加权求和。
对前一个OFDM符号的信道响应估计值和后训练序列的信道响应估计值进行系数加权求和来估计当前OFDM符号的信道响应,即
(6)(6)式中:r1和r2为加权系数(其和为1)。每个OFDM符号都包含4个导频子载波,不同OFDM符号在相同导频子载波处的信道频率响应关系在一定程度上可以反映出信道变化趋势和符号间的相关性,因此,可以利用这3个OFDM符号中4个导频子载波处的信道频率响应关系获得加权系数,如
(7)
(8)
(9)
需要指出的是:(6)-(8)式中的所有量都是复数形式,要分虚部和实部分别计算。
步骤3 判决反馈信道估计。
(10)
(11)

(12)
步骤4 低通滤波。

不考虑OFDM符号标号i和空子载波,将(1)式表达为矩阵形式
Y=XH+W=XFLhL+W
(13)
(13)式中:Y=[Y0,…,Yk,…,YNs-1]T表示频域接收信号,k∈U,Ns=52 (仅包括数据和导频子载波);X=diag(X0,…,Xk,…,XNs-1)表示频域发送信号;W=[W0,…,Wk,…,WNs-1]T表示频域高斯白噪声;hL表示长度为L的信道脉冲响应;FL为Ns×L维矩阵,它是通过提取酉傅里叶变换矩阵F(各元素为[F]n,k=e-j2πkn/N,0≤n≤N-1,0≤k≤N-1)的前L列和52个子载波位置所对应的行而构成的矩阵,在实际操作中可以进行预处理。
(14)
信道脉冲响应的最大似然估计(maximum likelihood,ML)为
(15)

(16)

(17)
3.2 时延分析
与其他改进的判决反馈信道估计方法相比,本文所提方法是以接收端接收到后训练序列为前提,存在更长的延时,理论上值为MTs。其中,OFDM符号周期Ts是固定的(8 μs),延时会随数据包中数据OFDM符号数M的增大而增大。在行车安全应用中,典型的数据包长度为200 Byte~500 Byte(不考虑数据安全机制带来的额外开销),允许的处理时延为100 ms(除撞击预警侦测系统为20 ms)[17]。取最大数据包长度(500 Byte),可计算出M为50,相应的最大时延为0.4 ms,能够满足车载通信系统安全应用对时延的要求。
4 仿真结果与分析
为了评估所提信道估计方法的性能,本文针对不同车载环境(城市车车通信、郊区车路通信和高速车车通信),就不同调制方式(QPSK,16QAM和64QAM)和不同数据包长度(200 Byte,300 Byte,400 Byte和500 Byte)对OFDM系统进行仿真。系统带宽为10 MHz,子载波间隔为156.25 kHz,信道模型为1.2节描述的TDL模型,具体信道参数见文献[16],系统误包率是以10 000个数据包为单位进行统计的。为了与所提信道估计方法作比较,本文也对标准中采用的基于前导训练序列的LS算法和目前取得较好性能的STA方法、CDP方法、结合平滑滤波的判决反馈信道估计方法(仿真结果中用DD_smoothing表示)进行了仿真。
图7和图8分别评估了不同车载环境和不同数据包长度对OFDM系统误包率性能的影响。由图7可知:本文提出的方法在郊区车路通信和城市车车通信场景中能获得较低的误包率(在信噪比为30dB时低于10-3),在高速车车通信场景中,由于车速增大,多普勒效应更加明显,系统误包率会有所上升,但仍然优于结合平滑滤波的判决反馈信道估计方法。由图8可得,数据包长度越长越不利于数据包的传输,但即便是在高速车车通信环境下,数据包长度增加到500Byte时,所提方法仍然可以降低系统误包率到10-1以下,这是其他改进的判决反馈信道估计方法难以达到的。
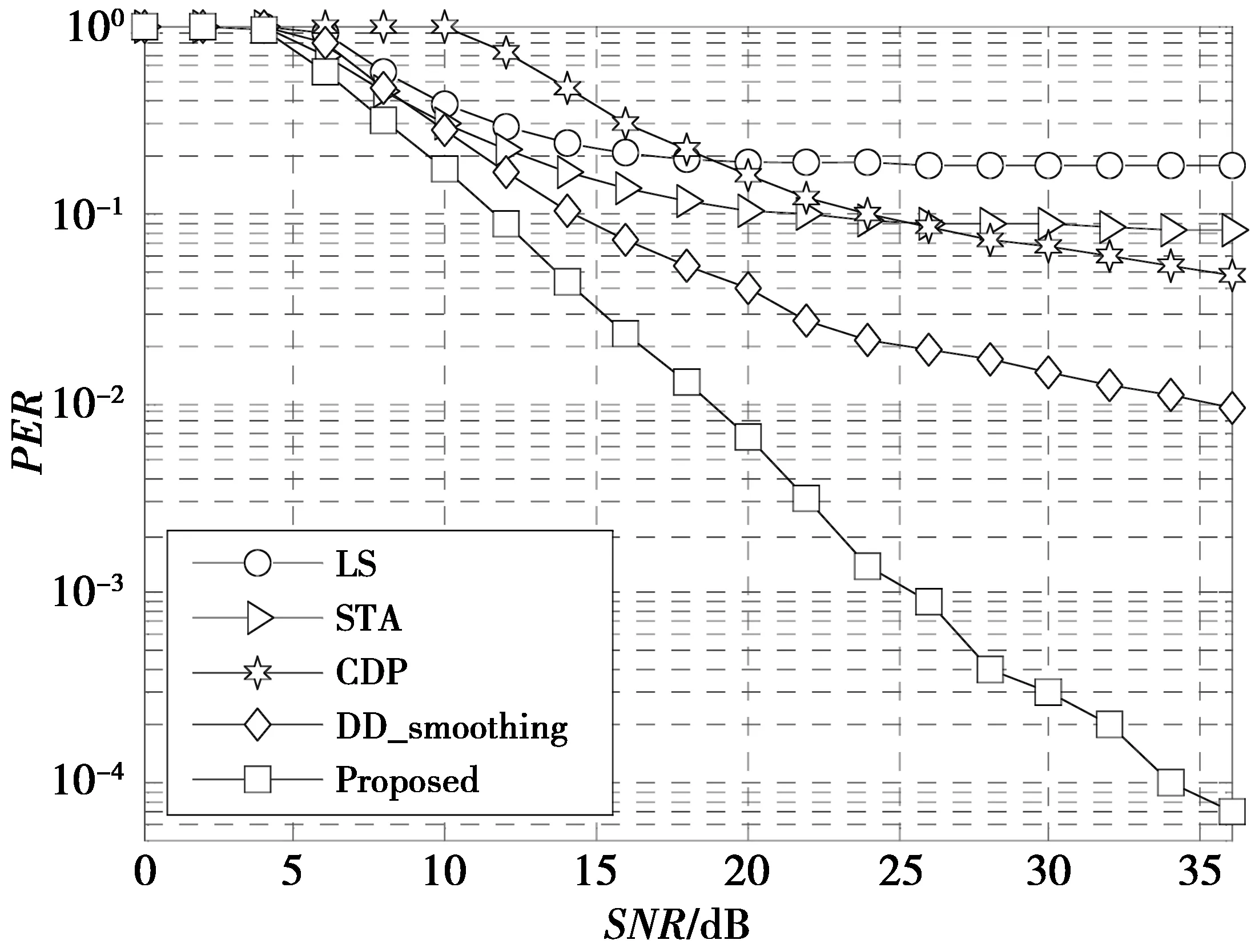
图4 采用QPSK调制时各种信道估计方法误包率比较(编码率为1/2)Fig.4 Comparison of PER in QPSK modulation(code rate 1/2)
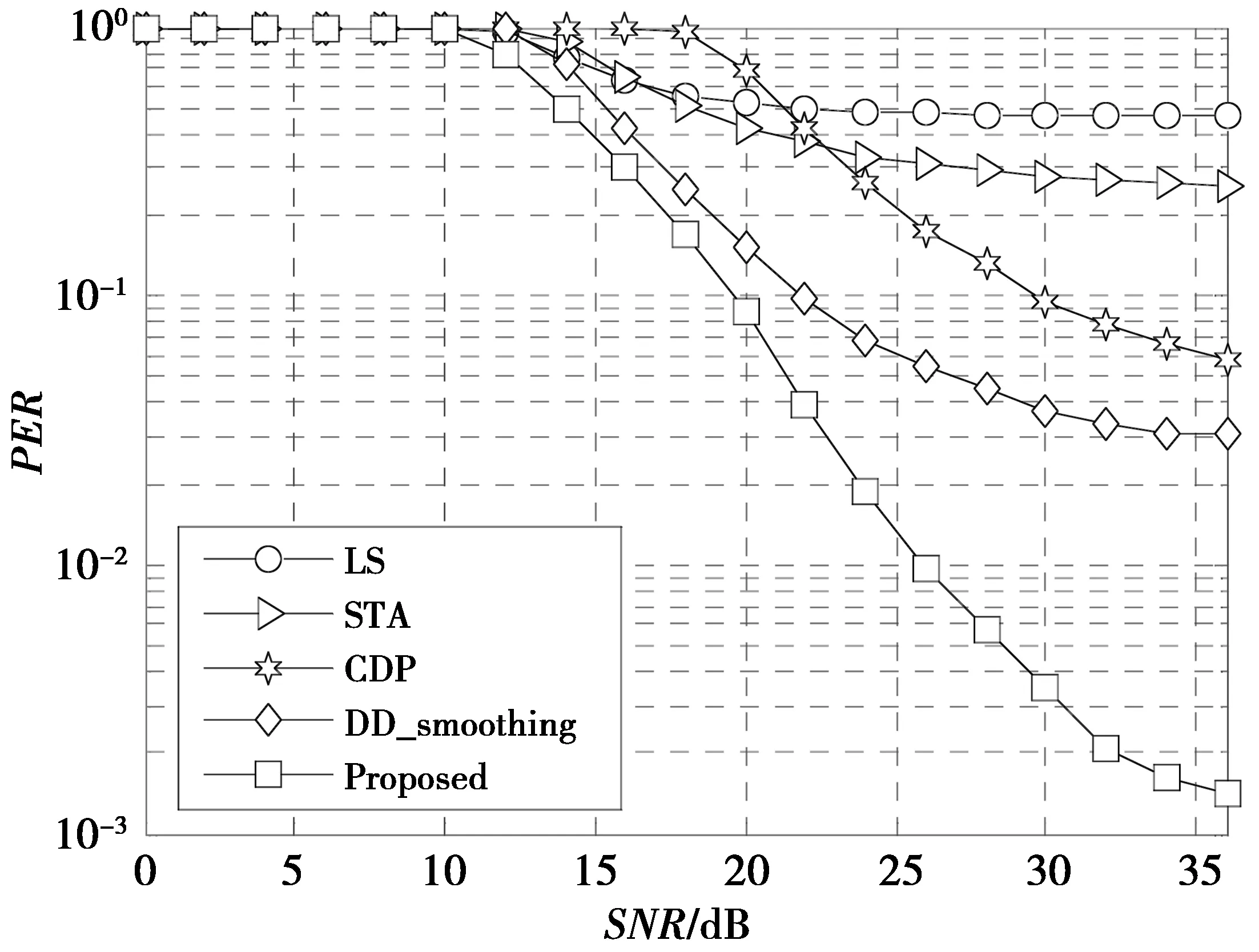
图5 采用16QAM调制时各种信道估计方法误包率比较(编码率为1/2)Fig.5 Comparison of PER in 16QAM modulation(code rate 1/2)
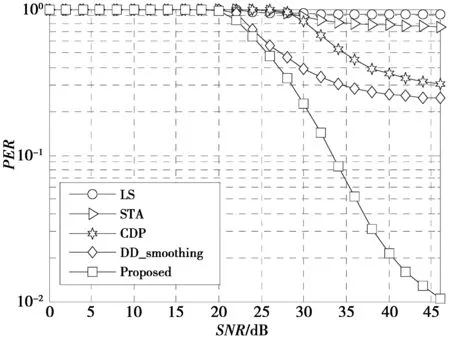
图6 采用64QAM调制时各种信道估计方法误包率比较(编码率为2/3)Fig.6 Comparison of PER in 64QAM modulation(code rate 2/3)
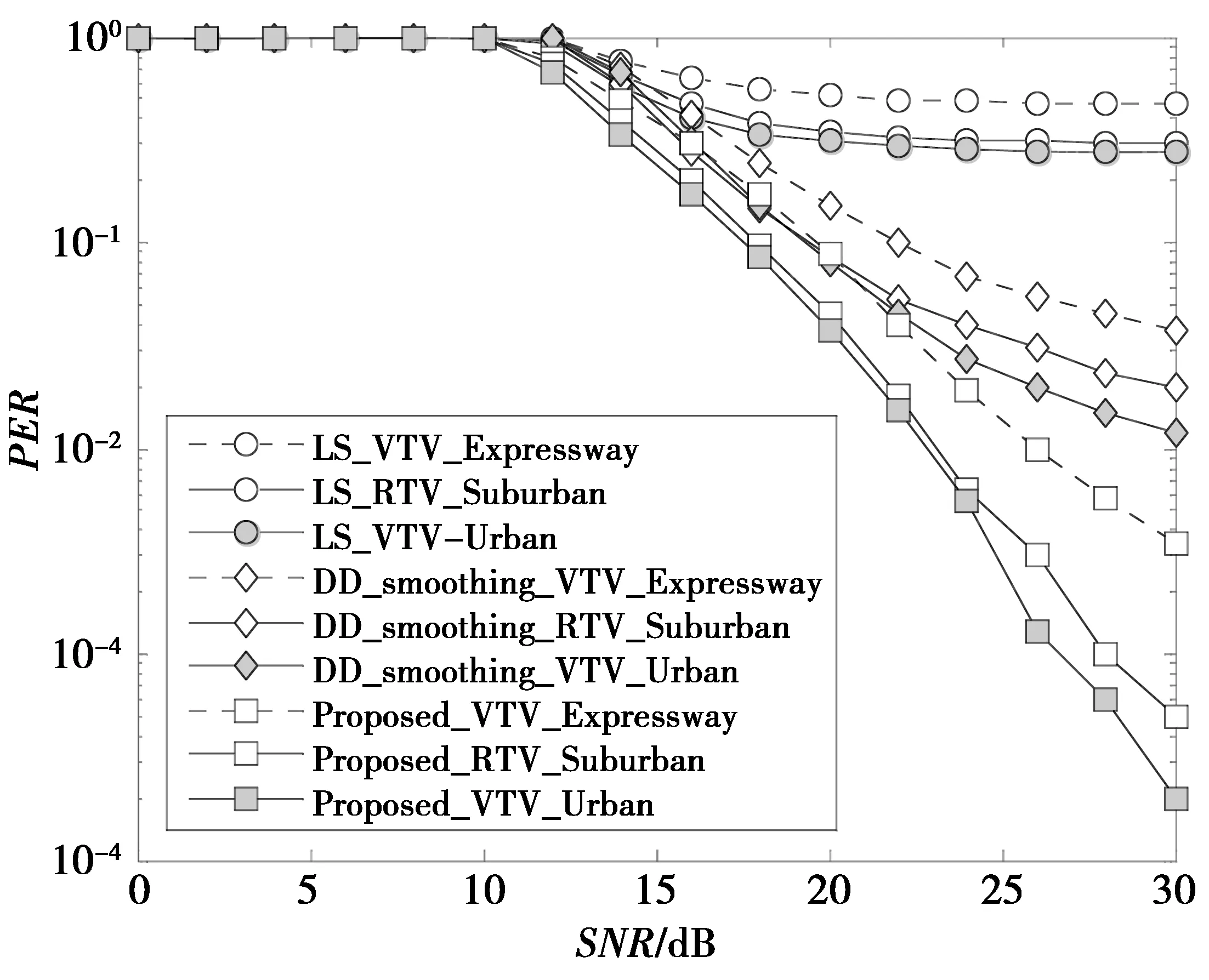
图7 不同车载环境下系统误包率性能比较(调制方式为16QAM,编码率为1/2,数据包长度为200 Byte)Fig.7 Comparison of PER with respect to different vehicular environment(16QAM with code rate 1/2, packet length 200 Byte)
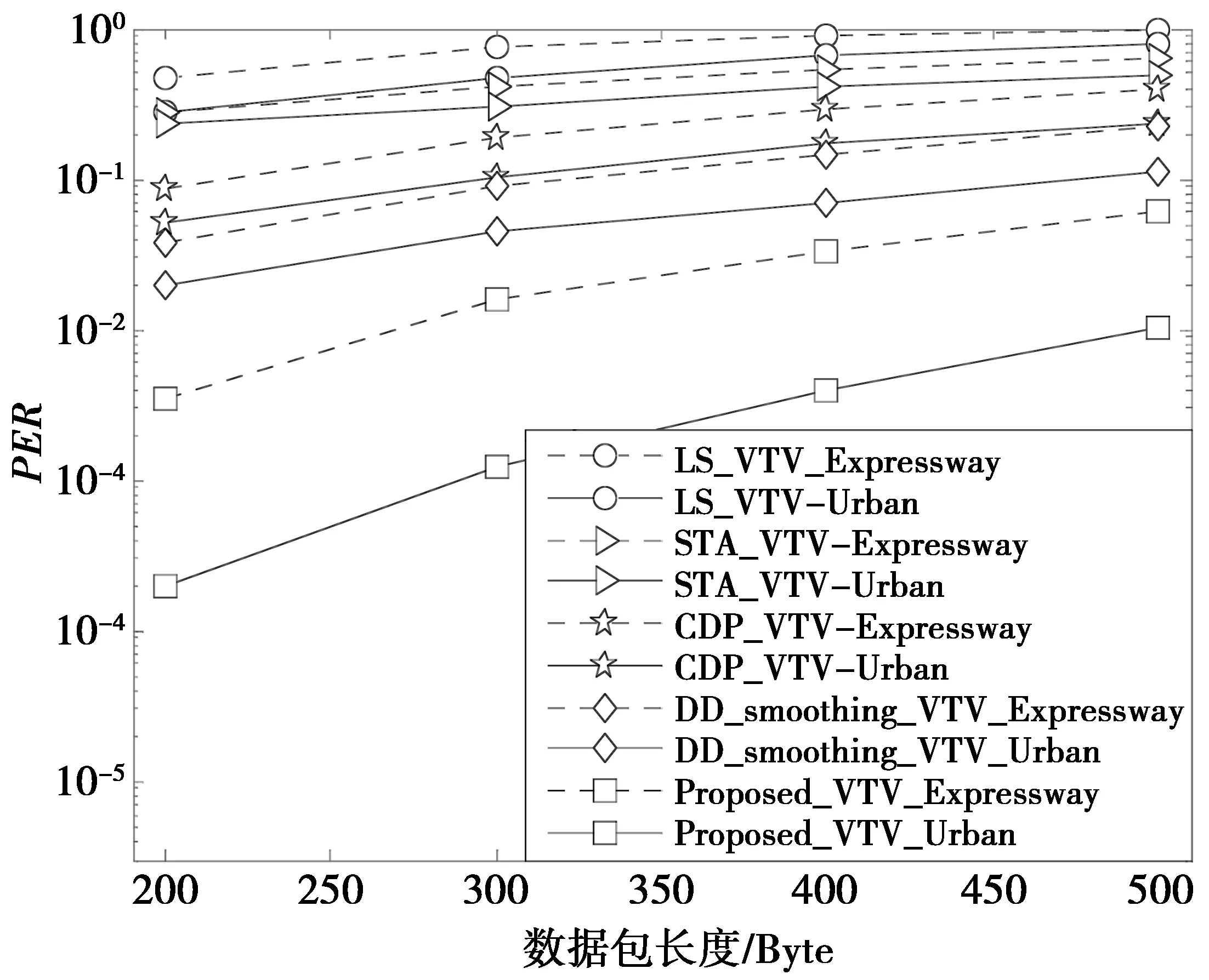
图8 不同数据包长度情况下系统误包率性能比较(调制方式为16QAM,编码率为1/2,SNR=30 dB)Fig.8 Comparison of PER performance with respect to different packet length (16QAM with code rate 1/2,SNR=30 dB)
5 结束语
本文针对具有较大多普勒扩展和时延扩展的车载环境,提出了一种结合后训练序列的判决反馈信道估计方法。通过联合后训练序列的信道响应,能更有效地跟踪到信道变化,提高信道估计精度。仿真结果表明:在不同车载环境下,采用不同调制方式和数据包长度时,所提方法均能获得远远优于LS信道估计方法、STA方法、CDP方法和结合平滑滤波的判决反馈信道估计方法的误包率性能。
[1] IEEE Computer Society. IEEE Standard for Information technology-Telecommunications and information exchange between systems-Local and metropolitan area networks-Specific requirements-Part 11: Wireless LAN Medium Access Control(MAC) and Physical Layer(PHY) specifications-Amendment6: Wireless Access in Vehicular Environments: IEEE Std 802.11pTM-2010[S]. New York, USA: IEEE, 2010
[2] MECKLENBRAUKER C F, MOLISCH A F, KAREDAL J, et al. Vehicular channel characterization and its implications for wireless system design and performance[J]. Proceedings of the IEEE, 2011, 99(7): 1189-1212.
[3] ABDULHAMID H, TEPE K E, ABDEL-RAHEEM E. Performance of DSRC systems using conventional channel Estimation at high velocities[J]. AEU-International Journal of Electronics and Communications, 2007, 61(8):556-561.
[4] LIN C S, LIN J C. Novel channel estimation techniques in IEEE 802.11p environments [C]//Vehicular Technology Conference(VTC 2010-Spring),2010 IEEE 71st. Taipei: IEEE, 2010:1-5.
[5] KIM S I, OH H S, CHOI H K. Mid-amble aided OFDM Performance Analysis in High Mobility Vehicular Channel[C]//Intelligent Vehicles Symposium,2008 IEEE. Eindhove: IEEE, 2008:751-754 .
[6] ZEMEN T, BERNADO L, CZINK N, et al. Iterative Time-Variant Channel Estimation for 802.11 p Using Generalized Discrete Prolate Spheroidal Sequences[J].IEEE Transactions on Vehicular Technology, 2012, 61(3):1222-1283.
[7] ABDULHAMID H, ABDEL-RAHEEM E, TEPE K E. Channel estimation for 5.9 GHz dedicated short-range communications receiver in wireless access vehicular environments[J]. IET Communications, 2008,1(6):1274-1279.
[8] FERNANDEZ J A, STANCIL D, BAI F. Dynamic channel equalization for IEEE 802.11p waveforms in the vehicle-to-vehicle channel[C]//Communication, Control, and Computing,2010 48thAnnual Allerton Conference on. Allerton: IEEE, 2010:542-551.
[9] ZHAO Z, CHENG X, WEN M, et al. Channel estimation schemes for IEEE 802.11p standard[J]. IEEE Intelligent Transportation Systems Magazine, 2013,5(4):38-49.
[10] KYEONG Y, JANG M O, YOO H S, et al. Time and frequency domain channel estimation scheme for IEEE802.11p[C]//Intelligent Transportation Systems (ITSC), 2014 IEEE 17thInternatiional Conference on. Qingdao: IEEE, 2014: 1085-1090.
[11] BOURDOUX A, CAPPELLE H, DEJONGHE A. Channel tracking for fast time-varying channels in IEEE802.11p systems[C]//Global Telecommunications Conference(GLOBECOM 2011), 2011 IEEE. Houston, TX:IEEE, 2011:1-6.
[12] SAMPEI S. Computation reduction of decision feedback equalizer using interpolation for land mobile communications[C]//Global Telecommunications Conference, GLOBECOM'91.'Countdown to the New Millennium. Featuring a Mini-Theme on: Personal Communications Services. Phoenix, AZ: IEEE, 1991: 521-525.
[13] YE LI, CIMINI L J. Bounds on the interchannel interference of OFDM in time-varying impairments[J]. IEEE Transactions on Communication, 2001,49(3):401-404
[14] KAREDAL J, TUFEVESSON F, CZINK N, et al. A geometry-based stochastic MIMO model for vehicle-to-vehicle communications[J]. IEEE Transactions on Wireless Communications, 2009, 8(7):3646-3657.
[15] WIESBECK W, KNORZER S. Characteristics of the mobile channel for high velocities[C]//Electromagnetics in Advanced Applications, ICEAA 2007. International Conference on. Torino: IEEE, 2007: 116-120.
[16] ACOSTA M G, INGRAM M A. Six time-and frequency-selective empirical channel models for vehicular wireless LANs[C]// Vehicular Technology Conference(VTC-2007 Fall), 2007 IEEE 66th. Baltimore, MD: IEEE, 2007:2134-2138.
[17] HARDING J, POWELL G R, FIKENTSCHER. Vehicle-to-vehicle communications: Readiness of V2V technology for application[R]. Washington, USA: National Highway Traffic Safety Administration, 2014.
(编辑:张 诚)
A decision-directed channel estimation method with postamble in vehicular OFDM communication system
WANG Yan, DENG Jiao, WANG Chao, DENG Xianjun
(School of Electrical Engineering,University of South China, Hengyang 421000,P.R.China)
This paper proposes a decision-directed channel estimation method based on the information of channel variation carried by the channel response of postamble, catering for vehicular communication environment with both large Doppler spread and large delay spread. We firstly estimate the channel response of postamble by the least squares algorithm. Then, we estimate channel response of the current orthogonal frequency division multiplexing(OFDM) symbol by coefficient weighted summation for the estimated channel response value of the previous OFDM symbol and the postamble, and utilize the channel frequency response relationship between four pilot subcarriers of these symbols to automatically obtain weighted coefficients. In order to reduce the effect of noise,we implement decision-directed and low-pass filtering on the obtained channel response value of current OFDM symbol in succession. Simulation results show that the proposed method can obtain much better packet error rate (PER) performance compared to currently effective channel estimation methods, such as STA(spectral temporal averaging), CDP(constructing data pilot) and decision-directed channel estimation with channel smoothing.
vehicular communication; postamble; channel estimation; orthogonal frequency division multiplexing(OFDM); decision-directed
10.3979/j.issn.1673-825X.2017.01.001
2015-08-18
2016-03-17 通讯作者:邓 姣 sunnyhncs0122@126.com
国家自然科学基金资助项目(61401193)
Foundation Item:The National Natural Science Foundation of China (61401193)
TN914
A
1673-825X(2017)01-0001-08

王 彦(1971-),男,湖南衡阳人,湖南大学博士,南华大学教授、硕士生导师,主要研究方向为智能信息处理技术、智能控制。E-mail:wangyan5406@163.com。

邓 姣(1991-),女,湖南长沙人,南华大学硕士研究生,主要研究方向为智能信息处理与先进通信技术。E-mail:sunnyhncs0122@126.com。 王 超,男,湖南衡阳人,南华大学助教,主要研究方向为移动通信,软件无线电。E-mail:wchao207@163.com。 邓贤君,男,湖南衡阳人,华中科技大学博士,南华大学副教授、硕士生导师,主要研究方向为无线通信,无线传感器网络。E-mail:dengxj615@qq.com。