基于Arduino控制的移动平台设计
2017-02-23张展玮唐细永叶展鹏申耀武
张展玮,唐细永,叶展鹏,申耀武
(广州南洋理工职业学院,广东 广州 510925)
基于Arduino控制的移动平台设计
张展玮,唐细永,叶展鹏,申耀武*
(广州南洋理工职业学院,广东 广州 510925)
文章设计开发了一款利用Arduino控制的移动平台,可以根据所侦测到的周围的环境情况完成寻迹、避障、蓝牙操控、重力感应、定点摄像等功能,具有一定的实用和参考价值。实验结果证明,该方案设计有效。
移动平台;Arduino;智能
机器人的研发、制造和应用是衡量一个国家科技创新和高端制造业水平的重要标志,代表着未来智能装备的发展方向。随着现代社会的发展,在各行各业中机器人技术得到了广泛的运用,机器人作为执行机构,具有控制方便,执行动作灵活,可以实现复杂的空间轨迹控制。
1 移动平台的构成
移动平台主要由4部分组成:大脑(微控制器Arduino)、眼睛(避障传感器、寻迹传感器)、脚(直流电机驱动平台移动)、能源(移动电源)、远程遥控(蓝牙模块)。移动平台布置图如图1所示。

图1 移动平台布置
2 硬件设计
2.1 移动平台具备的功能
移动平台是一种能够代替人类在复杂环境中工作、复杂劳动的自动化机器人,是集机械学、电子、计算机等多学科知识于一体的高科技综合体。具备蓝牙操控、重力感应、定点摄像、寻迹和避障等功能。
(1)蓝牙操控、重力感应:通过蓝牙模块与手机蓝牙进行连接,当手机给一个指定信号时,通过蓝牙传输信号给核心处理器进行运算,将此信号传输给继电器驱动直流电机动作,从而实现蓝牙与重力控制功能。蓝牙模块如图2所示。

图2 蓝牙模块
(2)定点摄像:在一定的位置设定一个点,利用光敏传感器判别该点的位置,然后将信号传给中央处理器实现拍摄功能,利用WiFi即可将照片传给电脑或手机。
(3)寻迹:由寻迹传感器辨别指定黑色轨道发出特定的红外光波,当传感器接收到信号时,将反馈信号给核心处理器进行运算,从而驱动直流电机动作。寻迹传感器如图3所示。

图3 寻迹传感器
(4)避障:由避障传感器向外界漫射信号,当有信号反馈时,通过核心处理器进行运算,使直流电机停止运转。避障传感器如图4所示。

图4 避障传感器
2.2 Arduino UNO板
Arduino UNO是最新版本,作为智能移动平台的处理器。ATmega328是UNO的处理器核心,同时具有14路数字I/O口(其中6个口可作为PWM输出),模拟输入有6路,一个16 MHz晶体振荡器,一个电源插座,一个串行口,一个复位按钮和一个ICSP header。Ardunio UNO板外形如图5所示。

图5 Ardunio UNO板
3 程序设计
3.1 程序控制逻辑
3.1.1 寻迹逻辑
寻迹传感器发出红外光波当红外光波与黑色物体时无光波反射。其行驶原理是:由寻迹传感器将检测到黑线的信号传送给核心处理器,然后通过核心处理器的控制算法对信号进行计算处理,将此信号传输给继电器驱动直流电机,最后实现对智能车运动轨迹进行实时控制。
3.1.2 避障逻辑
壁障传感器向外发射红外光波,光波角度30°当有物体进入该范围时电机停转。寻迹避障逻辑如图6所示。
3.1.3 蓝牙控制逻辑
装载在移动平台上的蓝牙模块将作为与手机信号接收用途把得到的型号反馈给中央处理器处理。蓝牙控制逻辑图如图7所示。
3.2 程序控制
Arduino是一个基于开放原始码的软硬件平台,构建于开放原始码simple I/O界面版,并且具有使用类似Java,C语言的Processing/Wiring开发环境。包含两个主要的部分:硬件部分是可以用来做电路连接的Arduino电路板;另外一个是计算机中的程序开发环境Arduino IDE。
另外,通过各种功能不同的传感器来感知环境,通过控制LED灯、直流马达和其他的装置来反馈。移动平台可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进Arduino板。本设计的编程是利用Arduino编程语言和Arduino开发环境来实现的。
4 结语
基于Arduino开发的智能移动平台,控制系统可靠,可以根据侦测到的周围物体的情况实现前进、后退及左转、右转定点摄像等动作,具有一定的实用和参考价值。实验结果证明,该方案设计有效。
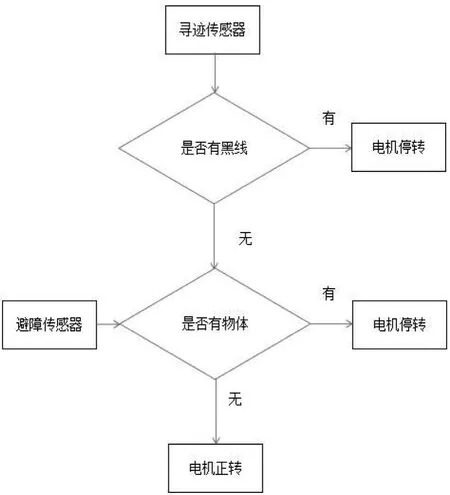
图6 寻迹避障逻辑

图7 蓝牙控制逻辑
[1]蔡睿妍.Arduino的原理及应用[J].电子设计工程,2012(16):155-157.
[2]付久强.基于Arduino平台的智能硬件设计研究[J].包装工程,2015(10):76-79.
[3]崔才豪,张玉华,杨树财.利用Arduino控制板的光引导运动小车设计[J].自动化仪表,2011(9):5-11.
[4]卞云松.基于Arduino单片机的避障小车机器人[J].自动化技术与应用,2014(1):16-19.
[5]纪欣然.基于Arduino开发环境的智能寻光小车设计[J].现代电子技术,2012(15):161-163.
[6]杨继志,郭敬.Arduino的互动产品平台创新设计[J].单片机与嵌入式系统应用,2012(4):39-41.
Design of mobile platform based on Arduino control
Zhang Zhanwei, Tang Xiyong, Ye Zhanpeng, Shen Yaowu*
(Guangzhou Nanyang Polytechnic, Guangzhou 510925, China)
This paper designs and develops a mobile platform controlled by Arduino, which can realize tracing, obstacle avoidance, Bluetooth control, gravity sensor, fixed camera and other functions according to the detected environment, it has certain practical and reference value. The experimental results prove that the design is effective.
mobile platform; Arduino; intelligent
2016年广州南洋产业研究院基金项目;项目编号:nycy2016jj013。
张展玮(1995— ),男,广东河源。
*通讯作者:申耀武(1979— ),男,山西晋中,硕士,讲师;研究方向:机电一体化技术教学。