远距离激光光斑定位中的光晕抖动抑制算法
2017-02-22邓凯鹏
邓凯鹏,陶 卫,赵 辉,金 毅
(上海交通大学仪器科学与工程系,上海 200240)
远距离激光光斑定位中的光晕抖动抑制算法
邓凯鹏,陶 卫,赵 辉,金 毅
(上海交通大学仪器科学与工程系,上海 200240)
在机械工程等领域,大型桁架等空间结构的空间定位需求十分普遍。激光光斑定位通过激光光源对反射标志补光,工业相机获取反射回来的激光光斑。算法采用Canny算子获取光斑边缘,最小二乘圆拟合得到拟合光斑圆心位置实现定位。在远距离光斑定位中,激光光斑边缘容易出现光晕抖动的现象。为抑制光晕抖动误差,提高系统测量精度,该文提出基于时序滤波和二次拟合的两种光晕抑制抖动的算法,分别基于对时序测量值进行平滑滤波的思想和剔除误差较大的噪声点后再次拟合的思想来消除光晕抖动对系统测量的影响,最后结合测量距离12.36m的反射靶标的光斑定位实验进行分析对比,最终二者将重复性误差界上、下限分别优化到±0.22pixel和±0.26pixel,能有效抑制光晕抖动产生的测量重复性误差。
激光光斑定位;光晕抖动抑制;Canny算子;最小二乘圆拟合
0 引 言
在船舶海洋、机械工程等领域,大型天线支架、桁架结构等的形变测量,和机械结构节点的空间定位中,对远距离、高精度的测量要求十分普遍。同时考虑到待测结构的质量、空间结构要求,激光靶标光斑定位的方式是满足上述测量条件的最优测量方案之一。激光光斑定位的图像处理算法多样,适应性强,可检测的动态范围大,是目前较常用的远距离非接触式测量方法[1]。在目前国内外的机械结构空间定位中,NASA对卫星天线的测量,采用在天线反射器背面和抛物面上固定500个反射材料,通过百万像素级工业相机进行空间定位。
激光光斑定位的方法核心在于确定激光光斑的圆心像素坐标,主要方法有Hough变换法、重心法和最小二乘圆拟合算法[2-4]。其中重心法适用于光斑能量分布较为稳定的光斑定位,Hough变换法将光斑像素点映射到参数空间离散化,检测精度较低,一般用于进行光斑的粗定位,最小二乘算法首先提取光斑的边缘,然后采用最小二乘圆拟合的方式得到光斑的圆心像素坐标,以其亚像素细分的特性达到较高的定位精度,但其抗干扰能力较差,对于噪声敏感性较高[5]。
在远距离测量中,为了实现高精度的光斑定位,一般采用最小二乘法,当测量距离较远(10m以上),激光光斑容易产生抖动的光晕,引入较大干扰,本文基于最小二乘光斑定位,提出两种光晕抖动抑制的算法,优化在光晕抖动时测量结果的稳定性,并结合12.36m距离处的激光光斑实验,分析对比两种算法的优化效果。
1 系统测量原理
1.1 逆反射靶标
在激光光斑定位中,为保证定位光斑的成像质量,采用逆反射膜结构的靶标来提高激光反射光斑同背景的对比度,逆反射光斑能将绝大部分的入射光线沿入射方向反射到与光源处于同一位置的相机处,通过调整相机的曝光量,可以得到逆反射光斑清晰规则,背景消隐的高对比度激光光斑,提高了激光光斑边缘检测的准确性。
其中,逆反射膜材料采用高折射率微晶立方角体组成[6],结构如图1所示,能将入射光R1经b面和a面反射后反射光线R2沿入射光线反方向反射。

图1 逆反射膜微观结构示意图
系统测量中采用直径为80 mm的3M 8910钻石级逆反射膜靶标,其逆反射特性能将80%以上的光通量聚束在与入射方向夹角3°的范围内。
1.2 测量原理
系统用于测量如图2所示23.6m×6m矩形框架结构,如图中所示水平竖直等分为A、B、C、D 4个分区,每个分区框架上固定6个逆反射靶标,中心星体四角处固定4个测量装置,其中最远靶标距测量装置距离为12.36m,采用532nm激光对逆反射靶标进行补光,采用工业相机实时拍摄得到各靶标的逆反射光斑定位靶标位置,计算得到天线的振动和平面度信息。

图2 测量结构示意图
系统测量中通过工业相机实时得到逆反射光斑图像,对每个分割出的光斑采用Canny算子提取边界,最小二乘圆拟合的方法得到逆反射光斑圆心的像素坐标,对应为该靶标点处框架振动的空间位置。由于最小二乘圆拟合能实现倍的细分,n为边缘有效像素点数,故系统测量能达到亚像素级精度[7]。
2 光晕抖动抑制算法
2.1 光晕抖动分析
为保证逆反射光斑的质量,须保证逆反射光斑与背景反射光的对比度,当反射靶标距离测量装置的距离加大时,逆反射到相机内的光强会减小,需要加大曝光量来得到均匀规则的光斑;另一方面,当逆反射靶标反射到相机的光强减小时,其与背景反射光的对比度会降低,此时增大曝光量光斑就会产生光晕,影响测量精度[8-9]。
为保证系统的远距离测量需求,需要系统光源在远端也能有很好的照度,即对光源的集聚性和准直性有较高要求,采用激光照明的方式能很好地满足照度要求。另一方面,激光的热效应和温漂使激光出射光会产生一定的指向性抖动,同时空气中的微尘和气流对远端照明也有一定影响,致使远端光斑的光晕出现抖动和蠕动的情况,使光斑形状偏离理想状态[10-11]。
最远处逆反射靶标的反射光斑实测如图3所示,其光斑外围有一圈不规则的光晕,且会随时间抖动,对圆心定位的重复性精度有较大影响。

图3 最远靶标逆反射光斑测量图
2.2 时序滤波算法
为抑制光晕抖动产生的误差,可在程序中维护一个长度为l的队列作为一个窗存储其历史光斑定位测量数据,当程序处理光斑得到新数据时,将测量数据入队,队头的第前l次测量数据出队,即窗中只存储此次测量数据到第前l-1次间的测量数据,如图4所示。
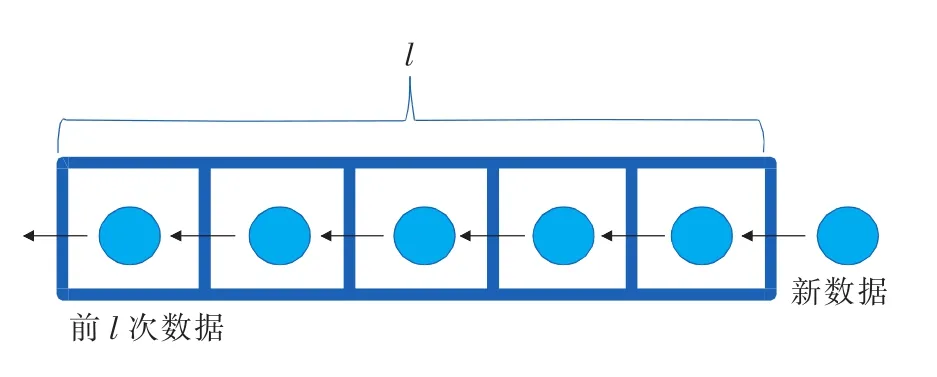
图4 历史数据窗示意图
当新数据入队时,历史数据依次前移,第前l次测量数据出队,保持窗内恒有历史l次测量数据。当新数据入队后,可对窗内数据进行排序,去除最大和最小的n个数据然后对剩余数据取平均作为此次光斑定位的测量值。即t时刻的实际输出Ot如下式所示:

式中mt为t时刻光斑定位的实际测量数据,(mt-l+1,mt-l+2,…,mt)sort为对其历史l次测量数据进行排序结果,并取其中第n到第l-n的数据的均值作为测量结果。
上述处理过程实际上是对时序测量值进行了低通滤波,一定程度上削减了随时间变化快的高频信号,而光晕抖动的噪声信号相对于其实际靶标的位移属于高频信号,能得到较好的抑制。
在上述处理方式中,当l增大时,其低通滤波的截止频率越低,对光晕抖动噪声的抑制也越好,但测量系统的动态特性也越差,当远端靶标产生位移时,系统需要滞后l次测量结果才能正确输出该位移,故这种处理方式一般适用于静态测量和动态特性要求不高的系统中。
2.3 二次拟合算法
光斑光晕的抖动一般呈毛刺或者峰谷的性质径向抖动,考虑这种误差主要集中在径向方向,可采用剔除误差较大的点后进行第2次最小二乘圆拟合的方法来减小边缘噪声点对测量结果的影响。
二次拟合算法首先采用最小二乘圆拟合计算得到光斑的拟合圆心和拟合半径,后对所有边缘像素点计算其相对于拟合圆函数的均方差,基于均方差设置一定的阈值,当该边缘像素点到拟合圆函数的平方误差大于该阈值时,认为为噪声边缘点并予以剔除,对所有非噪声边缘点进行第2次最小二乘圆拟合得到圆心坐标作为实际测量结果。
算法中边缘像素点的平均平方误差计算公式如下式所示:

式中:n——边缘像素点数;
xi,yi——第i边缘像素点坐标;
选定系数λ,对所有边缘像素点,若其平方误差大于λe,则认为为误差点剔除,即剔除满足下式的边缘像素点。

对于带光晕的光斑,其剔除误差点前后的边缘图像如图5所示。图5(a)中光晕导致边缘出现噪点。

图5 定位算法重复性误差图
式(3)中,λ取值越小,剔除的边缘像素点越多,对光晕抖动误差抑制越明显,同时,留存下来的点数也越少,边缘有效像素点数也越少,其精度细分倍数也越小,定位精度也会下降。
3 实验验证
3.1 实验设计
为验证上述两种算法对测量结果重复性精度的优化性能,基于测量系统中最远点靶标的定位进行实验验证。实验中靶标直径为80 mm,靶标距相机12.36 m。
连续拍摄最远点靶标逆反射光斑2656幅图像,Canny算子提取边界后最小二乘拟合计算圆心坐标,得到圆心像素坐标X方向重复性误差如图6所示。对图中测量结果采用上述两种误差抑制算法进行处理,对比两种算法的误差抑制效果。

图6 定位算法重复性误差图
3.2 优化结果与分析
采用时序滤波方法优化,取窗口宽l=5,剔除最大最小值点数n=1,得到处理后测量重复性误差如图7所示。
采用二次拟合算法,取系数λ=1,得到处理后测量重复性误差如图8所示。
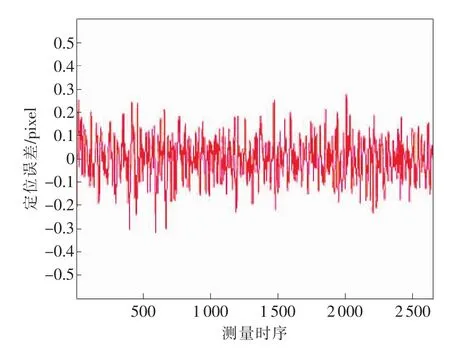
图7 时序滤波处理后重复性误差图
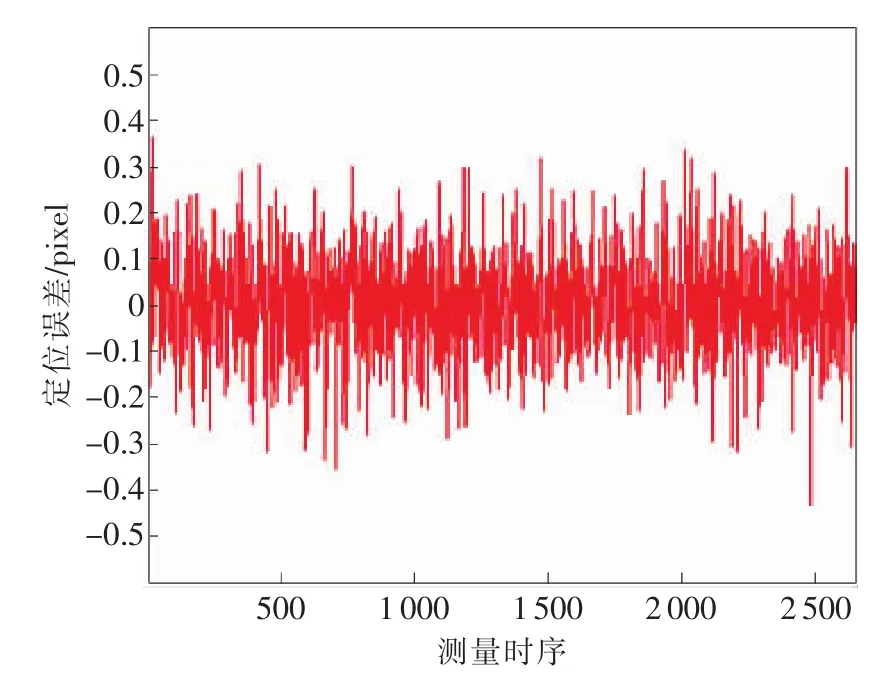
图8 二次拟合处理后重复性误差图
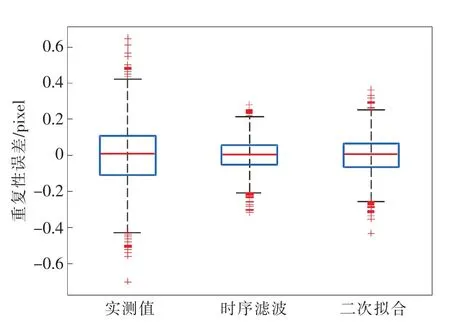
图9 重复性误差箱线图

表1 重复性误差分布分位数表
对比处理前后的测量结果重复性误差分布可得重复性误差分布箱线图如图9所示。从图中可以得出,原始数据和两种优化算法的处理数据的中位数,上下四分位数和上下限值如表1所示。表中Q1和Q3分别代表上四分位数和下四分位数。从上表1中可以看出,原始数据重复性误差的上下限为[-0.43pixel,0.42pixel]区间,时序滤波算法能将其优化到[-0.21pixel,0.22pixel]区间,二次拟合算法能优化到[-0.26pixel,0.26pixel]区间,均能很好地提高光斑定位的重复性精度。
对比两种算法的重复性误差箱线图和时序图,采用时序滤波算法的优化效果要明显高于二次拟合的优化效果,但时序滤波算法对历史数据取平均会产生正比于窗宽的滞后,其动态特性较二次拟合算法相比有所不足。
4 结束语
针对远距离光斑定位的光晕抖动干扰问题,本文提出了两种抑制干扰的优化算法,二者均能很好地抑制光晕的抖动误差,时序滤波算法将光斑定位的重复性误差上下限优化到±0.22pixel,二次拟合算法将重复性误差上下限优化到±0.26pixel。其中时序滤波算法抑制误差的效果明显优于二次拟合算法,但其会造成动态测量上的滞后,滤波窗越宽其优化效果越好,滞后也越严重,而二次拟合算法不会对系统动态特性产生影响。对比可知,当系统主要进行静态测量,对动态特性要求不高时,可采用时序滤波算法;当系统对动态特性有较高要求时,优先采用二次拟合算法。
[1]周中亮,周冰,何永强,等.成像型激光探测系统中光斑精确定位研究方法[J].激光技术,2008,6(3):248-251.
[2]孙爱鲜,王晶,何衡湘,等.激光光斑重心测量精度理论分析[J].激光技术,2004,32(3):667-672.
[3]章秀华,杨坤涛.一种改进的二维Hough变换提取激光光斑参数方法[J].激光与红外,2006,36(10):995-997.
[4]孙兵,王昭,谭玉山.基于圆拟合的激光光斑中心检测算法[J].红外与激光工程,2002,31(3):275-279.
[5]刘兆蓉,王志乾,刘绍锦,等.激光光斑中心精确定位算法研究[J].计算机仿真,2011,28(5):399-401.
[6]张明,乐孜纯,刘凯,等.微棱镜逆反射材料特性分析及制作[J].浙江工业大学学报,2016,6(3):351-354.
[7]王会峰,冀芳,汪大宝.激光准直成像测量光斑图像的亚像素检测算法[J].量子电子学报,2008,25(4):402-406.
[8]赵蓝飞,席志红.基于mean shift的光晕抑制算法[J].系统工程电子技术,2013,35(7):1558-1563.
[9]肖泉,丁兴号,王守觉,等.有效消除光晕现象和颜色保持的彩色图像增强算法[J].计算机辅助设计与图形学学报,2010,22(8):1246-1252.
[10]金刚,刘顺发,李树民,等.激光热效应对光束控制系统发射光束质量的影响[J].中国激光,2002,29(10):895-899.
[11]邹建,魏康林,刘颖.分布式光纤传感器系统的稳定性研究[J].压电与声光,2002,24(1):19-22.
(编辑:刘杨)
Halo thrashing restrain algorithm in long distance laser spot location
DENG Kaipeng,TAO Wei,ZHAO Hui,JIN Yi
(Department of Instrument Science and Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
In mechanical engineering,spatial location measurement in large spatial structure such as truss structure is generally required.Laser spot location method illuminates reflective marker with laser source and acquires the reflected laser spot with industrial camera.After detecting the edge of the spot with Canny detector,least square circle fitting will be led to get the fit spot center as the location of the marker.In long-distance location,Halo thrashing frequently occurs at the edge of laser spot.To restrain the trashing error and improve the precision of measurement,timing sequence filtering algorithm and quadratic fitting algorithm based on smooth filtering on time series value and refitting after removing noise are introduced in this paper to eliminate the effects of halo thrashing on measurement.The two algorithmsare comparatively analyzed and verified by experiment of laser spot location of reflective target with distance as 12.36m,and the repeatability error upper and lower limits are respectively optimized to±0.22 pixel and±0.26 pixel by the given algorithms,which are proved as effective for restraining the repeatability error caused by halo trashing.
laser spot location;halo thrashing restrain;Canny detector;least square circle fitting
A
:1674-5124(2017)01-0096-05
10.11857/j.issn.1674-5124.2017.01.020
2016-07-12;
:2016-08-19
邓凯鹏(1993-),男,湖北黄冈市人,硕士研究生,专业方向为光电检测、图像处理。
