平台式惯导系统三点校的常值误差解析
2017-02-21杨晓东夏卫星
杨晓东,夏卫星
(海军潜艇学院,山东 青岛 266199)
平台式惯导系统三点校的常值误差解析
杨晓东,夏卫星
(海军潜艇学院,山东 青岛 266199)
为估计和补偿各种误差源引起的综合校正误差,针对平台式惯导系统综合校正中的三点校,从理论上分析了外界测量信息误差和惯性平台水平误差对陀螺常值漂移综合校正效果的影响,并对受外界测量信息误差影响的三点校过程进行仿真。研究结果表明:“三点校”对陀螺常值漂移的估计误差,与重调时刻的量测误差、惯性平台水平失调角均呈线性关系,提高外界测量信息和惯性平台水平测量精度,是提高三点校精度的关键。
导航;综合校正;三点校;常值误差分析;平台式惯导系统
0 引 言
为提高惯性导航系统精度,常用综合校正估计陀螺漂移,即定期地对陀螺漂移进行测定和补偿,并重调系统航向和位置,主要校正方式可分为两点校、三点校或点点校。其中,三点校是在一定的时间间隔内,连续 3 次获得外部准确位置信息并进行系统重调,估计出陀螺常值漂移。通常,位置信息由GPS(或GLONASS)给出[1]。受外界测量信息误差、载体运动及惯导系统本身的影响,经校正所得的陀螺常值漂移存在误差,直接影响综合校正的效果。在考虑陀螺随机漂移和动态误差的影响后,文献[2-3]提出了在无阻尼综合校正方法。另外,校正结束后的系统参数突变导致导航系统平衡状态遭到破坏,产生超调,降低了系统精度,文献[4-5]采用自动补偿技术,改善了综合校正中的超调问题。文献[6-9]综合考虑外信息误差以及惯性导航系统平台误差,并针对这两类误差对 GPS/INS 组合导航统的影响进行讨论。
本文讨论三点校过程中外界量测误差与平台水平失调角对陀螺漂移估计的影响,并从理论上进行数学仿真与分析。
1 基于误差的三点校原理
载体在空间运动,矢量Ф(t)为平台坐标系相对地理坐标系的误差角;ψ(t)为平台坐标系相对计算机坐标系的误差角;Θ(t)为计算机坐标系相对地理坐标系的误差角。根据定义:
设东北天地理坐标系为OXYZ,Ф(t)在OXYZ系下各轴向的分量分别为α(t),β(t)和γ(t),即
2 三点校过程误差分析
由式(16)可知,在目前的外界测量信息及平台水平精度条件下,三点校中陀螺漂移估计误差的量级为 0.001°·h-1;由于东向、北向平台水平失调角分别和经纬度误差造成的估计误差相同,因此陀螺漂移的估计误差主要由量级较高的平台水平失调角引起。
3 仿真与分析
仿真环境为 Matlab7.0,采用文献[15]中介绍的平台式惯导系统仿真方法,对三点校过程进行仿真。仿真步长 40 s,时间 36 h。
仿真方法:令陀螺常值漂移、加速度计误差和惯导系统初始误差均为 0,在重调时刻添加外界测量信息误差,即陀螺漂移值仅为外界测量信息误差引起。
设定仿真条件为:潜艇航行纬度 30° N,初始速度V= 2 m/s,航向H0= 90°。2 次重调的时间间隔为 10 h。设第i次重调时刻经纬度的量测误差分别为 Δλi和Δφi,在不同的量测误差下,仿真得到的陀螺漂移值和式(16)计算的理论值如表 1 所示。
由表 1 可见,理论公式和仿真计算的结果基本一致,验证了上述结论。当 Δφ1= -Δφ2= Δφ3= 0.5,Δλ1= -Δλ2= Δλ3= -0.5 时,得到仿真计算的陀螺漂移最大值 4.448°·h-1× 10-5,与式(10)的计算结果比较可见:对“三点校”而言,随着量测设备精度的不断提高,量测误差引起的陀螺漂移估计误差很小甚至可忽略不计,故平台水平失调角是影响估计和校正精度的主要误差源。
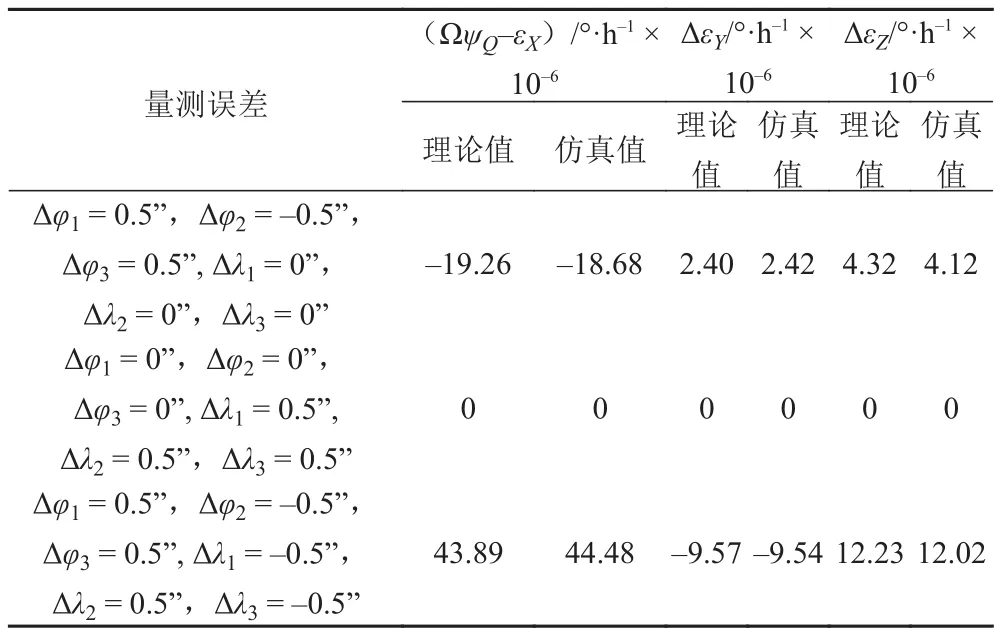
表 1 仿真结果和理论值对比Tab.1 Comparison of simulation results and theoretical value
4 结 语
论文以惯性导航系统三点校方法为研究对象,深入剖析了外界信息误差和惯导平台水平误差角对三点校正过程的影响。本文从理论上推导分析了陀螺漂移估计误差的影响公式,并采用计算机仿真对理论分析结果进行验证。验证结论充分说明,影响惯性导航系统三点校正的主要因素为平台水平失调角,对其进行补偿是提高校正精度的关键,研究结论可为进一步提高惯性导航系统导航精度提供理论参考。
[1]王光辉, 朱海, 莫军, 等.一种基于天空光偏振特性的天文导航方式[J].中国航海, 2009, 32(1): 14-16.
[2]于堃, 李琳, 刘为任, 等.舰船惯性导航系统海上无阻尼状态的校准[J].中国惯性技术学报, 2008, 16(6): 637-642.
[3]SINOPOLI B, SCHENATO L, FRANCESCHEAI M, et al.Kalman filtering with intermittent observations[J].IEEE Transactions on Automatic Control, 2004, 49(9): 1453-1464.
[4]程建华, 郝燕玲, 孙枫, 等.自动补偿技术在平台式惯导系统综合校正中的应用研究[J].哈尔滨工程大学学报, 2008, 29(1): 40-44.
[5]关劲, 程建华, 吴磊, 等.船用平台式惯导系统状态转换技术的应用[J].中国造船, 2008, 49(2): 75-80.
[6]钱山, 李鹏奎, 张士峰, 等.MIMU/GPS组合导航建模及GPS时间延迟补偿算法研究[J].系统工程与电子技术, 2009, 31(6): 1432-1435.
[7]张源, 许江宁, 卞鸿巍.GPS姿态测量系统对惯性导航系统误差修正能力分析[J].情报指挥控制系统与仿真技术, 2005, 27(5): 96-100.
[8]韩璐, 景占荣, 段哲民.SINS/GPS组合导航系统仿真研究[J].计算机仿真, 2009, 26(9): 32-36.
[9]杨艳娟, 卞鸿巍, 田蔚风, 等.一种新的INS/GPS组合导航技术[J].中国惯性技术学报, 2004, 12(2): 23-26, 35.
[10]单丹萍.基于COM组件的平台式惯导系统模拟器设计与实现[D].哈尔滨: 哈尔滨工程大学, 2007: 23-26.
[11]牛其虎.平台式惯导系统模拟器的设计及实现[D].哈尔滨:哈尔滨工程大学, 2006: 25-28.
[12]冯跃强, 王彬, 蔡伯根.GPS/GLONASS组合定位导航技术的测试[J].北京交通大学学报, 2005, 29(2): 91-93, 96.
[13]岳亚洲, 田宇, 张晓冬.机载惯性/天文组合导航研究[J].光学与光电技术, 2008, 6(2): 1-5.
[14]何炬.国外天文导航技术发展综述[J].舰船科学技术, 2005, 27(5): 91-96.
[15]方海斌.平台式惯导系统仿真软件的设计[D].哈尔滨: 哈尔滨工程大学, 2009: 21-22.
Constant error analysis of gimbaled INS in three-point comprehensive calibration
YANG Xiao-dong, XIA Wei-xing
(Department of Navigation and Communication, Submarine Academy, Qingdao 266199, China)
The influence caused by exoteric information error and platform horizontal error in two-point comprehensive calibration was studied in theory.The relation between maximum value of gyro drift error and calibration intervals was derived.It also represented the simulation of three-point calibration affected by exoteric information error.The study result shows that these two kinds of error are both linear with the estimation error of the constant gyro drift.In order to treat it as a high precision approach of calibration, it is important to increase the exoteric information precision and platform horizontal accuracy efficiently.
navigation;comprehensive calibration;three-point comprehensive calibration;constant error analysis;gimbaled INS
U666.1
:A
1672-7619(2017)01-0118-04doi:10.3404/j.issn.1672-7619.2017.01.024
2016-01-25;
: 2016-03-17
杨晓东(1963-),男,博士,教授,研究方向为航海导航。
