基于单片机的汽车倒车测距系统设计
2017-02-20张涛
张涛
辽宁锦州渤海大学工学院
基于单片机的汽车倒车测距系统设计
张涛
辽宁锦州渤海大学工学院
本文介绍基于单片机控制的汽车倒车测距系统,在汽车行驶或者倒车时,倒车雷发送超声波到达障碍物,反射后经放大电路放大返回单片机控制电路,单片机控制电路对反射回的数据进行分析计算出汽车离障碍物的距离,数码管会实时动态显示,系统会设定一个安全值,如果数码管上的数值小于或者等于安全值时,报警声会发出,以此警示驾驶员,然后实行安全倒车。
单片机 超声波 测距
1 引言
随着我国汽车数量迅猛增长,使得交通事故,恶性事故的发生机率也变得越来越大,交通安全问题显得尤为突出,如果在交通事故发生之前,我们能够向驾驶员发出警告,驾驶员就可以接受警报信号,然后做出相应应对方法,那么交通事故的发生,就可以在很大程度上得到减少人身以及财产安全得以保障。于是汽车倒车测距系统应运而生,系统以单片机为主控制器的,在汽车行驶或者倒车时自动检测障碍物,超声波进行测距,然后传感器接收到回波信号,控制器进行数据处理,计算出汽车与障碍物之间的距离,当此距离达到设定的距离时,将通过LED数码管显示,通过蜂鸣器进行报警。
2 系统硬件设计
汽车在行驶过程中,会与其他汽车靠的太近,这样可能发生碰撞情况,这样就需要设计一个汽车倒车测距系统,汽车倒车测距系统中硬件设计是比较重要的,该硬件设计系统应该有单片机控制模块,超声波发射与接收模块,LED模块,蜂鸣器报警模块负责报警,单片机控制系统负责数据的处理,控制超声波的发射,超声波发射与接收模块负责超声波的发送与接收,显示模块负责距离的显示,蜂鸣器报警模块负责报警,警示驾驶员做出相应措施。
2.1 STC89C52的功能模块
STC89C52单片机的重要组成有,中央处理器、存储器、输入输出接口等部分,8K字节Flash,512字节RAM,32位I/O口线,内置4KB EEPROM,3个16位定时器/计数器,4个外部中断是STC89C52的基本功能。STC89C52引脚如图1所示:

图1 STC89C52引脚图
2.2 超声波测距系统模块
汽车在行车过程中,会遇到障碍物,这时候,发射器会发出信号,遇到障碍物后发生反射,接收器接收信号,放大后送入控制系统,这期间时间可以测得,根据时间,计算出距离并做出判断。超声波的发送与接收不好模拟,可以在PROTEUS仿真图上进行仿真,模拟两个探头,其中一个为发射探头,一个为接收探头,超声波发射探头发射超声波,超声波遇到障碍物后会发生反射,超声波接收探头接收反射回来的超声波,并将反射回来的超声波送入单片机,单片机会对这个声波信号进行数据处理,然后系统会根据计算出的距离进行判断,超声波测距原理如图2所示。
2.3 蜂鸣器报警模块
蜂鸣器工作过程需要电,直流电源是用电的来源,在当今生活中被广泛应用。蜂鸣器,是一种电子发声器,特点是一体化,包括两种类型,压电式蜂鸣器和电磁式蜂鸣器。本设计需要实现报警,这个部分采用蜂鸣器进行,通过控制电路,计算出障碍物与汽车之间的距离,当倒车达到这个安全距离范围内,蜂鸣器会报警对驾驶员进行提醒。蜂鸣器报警装置设计如图3所示。
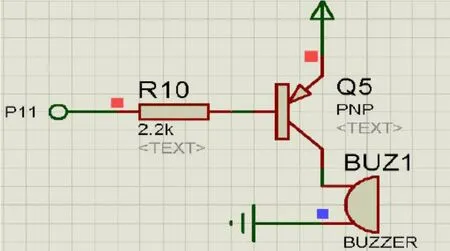
图3 蜂鸣器报警装置设计图
2.4 按键模块设置
为按键装置的设计模块,有三个按键,从左至右依次为,设置键,加键,减键,系统对倒车的安全距离初始设置为100cm,通过加键可以增大安全距离,通过减键可以缩减安全距离,通过设置键可以设定安全距离。
3 软件设计
汽车倒车测距系统在倒车过程中起着非常重要的作用,这样可以实现汽车的安全倒车,防止发生碰撞。距离的测量与计算,显示都需要本设计来完成,设计此系统软件分为两个部分,即主程序和子程序,其中中断程序即为子程序,主程序的功能是系统初始化,设置中断,控制系统对超声波的发送与接收,计算汽车到障碍物之间的距离。
3.1 主程序模块
主程序的功能:系统的环境可能不适合该设计的研究,首先对系统环境初始化,定时器T0工作模式被设置为16位定时计数器模式。EA进行置位,紧接着显示端P0和P1清零,调用超声波发生子程序,送出一个超声波脉冲,超声波从发射器直接传送到接收器。系统主程序流程如图4所示:
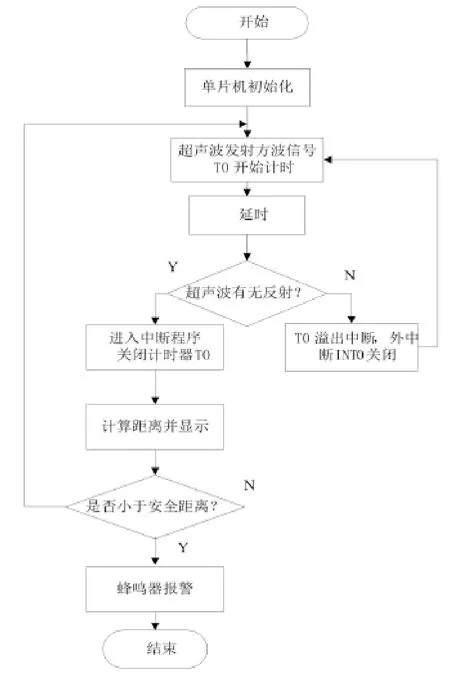
图4 系统主程序流图
首先,需要对单片机进行初始化,紧接着超声波发射器发出超声波,计时器T0同时开始计时,为了避免直射波的触发,系统需要延时,超声波经障碍物后返回超声波接收模块,如果系统检测到超声波有反射回来,那么计时器T0将会停止计数,同时反射回来的声波信号经放大后,送入单片机控制单元,控制单元对数据进行处理计算,从而得到汽车到障碍物之间的距离,这个距离会被显示在LED数码管上。
得到的距离如果与系统设定的安全值相同或者小于安全值,那么系统就会报警,这个系统的报警方式是通过蜂鸣器提醒驾驶员,驾驶员接收到报警信号后会做出相应的措施来阻止事故的发生。相反,如果回波信号没有产生,那么T0将产生溢出中断,系统将重新发送超声波信号同时计时器T0开始工作,测出的汽车到障碍物之间的距离如果大于安全距离,代表汽车与障碍物之间理论上不会发生碰撞,这个时候程序也将回到开始,重新启动超声波的发送。距离显示通过LED完成,报警通过蜂鸣器发出报警信号。
3.2 测距模块
超声波在空气中的传播会受到温度的影响,此设计一般认为,温度对超声波的传播速度没有影响,在汽车倒车过程中遇到障碍物,都有可能对汽车安全造成威胁。此设计中,汽车可以自动检测到可能存在的危险,从而向障碍物发送超声波,超声波遇到障碍物后会发生反射,反射的后的回波会被送回单片机控制单元,超生波从发射到反射回来到接收有着一定得时间,在一个汽车上,我们可以装配有超声波发射探头和超声波接收探头,超声波遇到障碍物会发生反射,发射的信号将会回到超声波接收探头,在超声波开始发射时。系统将会启动定时器模块,开始计时,超声波发射回到超声波接收探头,系统将会关闭定时器模块,定时器测得的二分之一时间是我们需要的,即超声波发射到超声波接收的单向时间,我们设置该时间为T,超声波传播的速度为V,那么汽车到障碍物之间的距离为S=VT,这样我们就可以在一个汽车上设有超声波发射与接收模块,这样就可以测得汽车离障碍物之间的距离。
3.3 距离显示
显示电路,就是将测得的距离通过LED显示出来,汽车在行驶过程中,超声波发射之后,发生反射,然后接收模块会反射该超声波,根据这个发射与接收的时间差,系统可以公式算出汽车到障碍物之间的距离。
4 系统调试
在器件安装之前,一定要及时的检查短路情况,等到元器件安装完后,接通电源,判断芯片有没有出现发热的现象,我们可以通过最简单的方法即感觉来判断,如果有发热现象,我们就要立即关掉电源。经过反复的调试硬件,如果检测到各个模块没有问题,应当反复检查,这样硬件调试才算完毕。
5 总结
本系统设计了基于单片机的汽车倒车测距系统,通过单片机设计使得系统的功能更加容易实现,超声波的发送模块与接收模块也是通过单片机来控制,蜂鸣器实现报警,警示驾驶员做出相应安全措施,用C语言进行程序的编译工作,实现了超声波测距,报警的基本要求,基本满足系统要求。
[1]石爱平,杜玉杰.汽车避撞的三种测距技术[J].2008(04) [2]张玉泉.基于单片机的超声波测距系统[J].应用科技.2013(12)
[3]朱琦.适用于汽车追尾归避的传感检测技术[J].西北民族大学学报(自然科学版).2009(3)
[4]凌超.德尔福汽车安全新技术[J].汽车电器.2013(2)
