直驱式巷道超前支架油缸控制方法*
2017-02-18蒋家宁
谢 苗, 蒋家宁
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
直驱式巷道超前支架油缸控制方法*
谢 苗, 蒋家宁
(辽宁工程技术大学 机械工程学院,辽宁 阜新 123000)
考虑到传统的阀控液压系统存在伺服阀容易因受到油液污染而无法正常工作、阀控液压系统效率低、节流损失大、造成能源浪费等问题,研究一种基于伺服电机直驱液压泵的超前支架电液控制方法。伺服电机直驱液压泵系统由于电机的启动和转向过程中存在滞后性,因此使用常规PID算法的控制效果较差,使用模糊PID算法对伺服电机直驱液压泵系统进行控制。使用Matlab/Simulink仿真软件建立本文研究的直驱泵控巷道超前支架控制系统的仿真模型,并建立超前支架的实验样机,使用常规PID与模糊PID算法进行对比研究,研究结果表明:模糊PID算法作用下,伺服电机直驱液压泵的超前支架液压缸位置变化的超调量更低,调整速度更快,能够快速跟踪给定信号曲线,具有较好的鲁棒性。
超前支架; 液压系统; 直驱泵控系统; 模糊控制
0 引 言
目前,巷道中临时支护设备主要有机载支护和超前支护两种,机载支护设备需要与掘进机配合使用,支护效率,同时会影响掘进机的掘进效率,而且安全性较差。超前支架装备能够较好地解决巷道的临时支护问题,其能够自行迈步前移,实现掘支锚平行作业,提高巷道安全性和掘进效率[1,2]。
液压系统是超前支架装备的重要组成部分,其工作性能直接影响超前支架的运行效率和支护可靠性,针对超前支架液压系统研究,文献[3]中使用模糊PID控制算法对超前支架的支撑力自动控制进行研究;文献[4~6] 以对顶板扰动量最小为控制目标,针对超前支架在迈步过渡过程的支撑力控制系统进行研究;文献[7]中以超前支架升降过程效率和对顶板扰动量最小为控制目标,针对超前支架的电液伺服位置和压力复合控制方法进行了研究;文献[8]中针对超前支架多缸同步控制方法进行研究。
以上研究内容对超前支架的液压系统控制方法进行详细的设计和研究,但是基本使用的是传统的阀控液压系统。
近些年来,直驱泵控液压系统逐步发展起来,相比传统的阀控液压系统,其具有更加灵活的可控性,因此本文研究一种基于伺服电机直驱液压泵的超前支架电液控制方法。
1 超前支护装备组成与工作原理
超前支架组成如图1所示。

图1 超前支护设备结构
超前支架的立柱为非对称液压缸,通过液压缸的伸缩实现立柱的升降,从而带动主、副支撑组的横梁和纵梁升降,当超前支架处于全支撑态时,主副支撑组共同支撑巷道顶板,当超前支架需要迈步前移时,控制其中一组支撑组的立柱下降,带动支撑组的横梁和纵梁下降,脱离巷道顶板,此时巷道顶板仅由一组支撑组支撑,通过推移油缸将下降的支撑组向前推移一个步距,之后再控制该支撑组的立柱上升,带动支撑组的横梁和纵梁上升,直至与巷道顶板接触,达到支护要求,最后控制另外一组支撑组进行相同的迈步过程即完成超前支架的迈步前移。
2 直驱泵控液压系统设计
超前支架的立柱为非对称液压缸,通过液压缸的伸缩实现立柱的升降。传统的阀控液压系统主要由可编程控制器、泵站、传感元件、平衡阀、溢流阀、液压缸以及核心元件电液伺服换向阀等组成。
传统的阀控液压系统主要存在的问题是伺服阀容易因受到油液污染而无法正常工作,另外阀控液压系统效率低,节流损失大,造成能源浪费,油温高,需要有冷却装置等。本文研究的伺服电机直驱液压泵的泵控液压系统组成如图2所示。
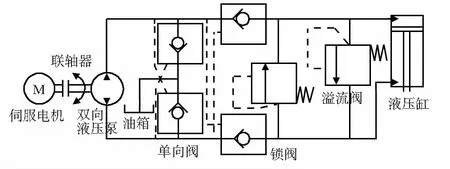
图2 伺服电机直驱液压泵的泵控液压系统组成
当伺服电机控制定量泵正转时,可令液压缸伸出,当伺服电机控制定量泵反转时,可令液压缸缩回,锁阀能够对锁定液压缸,防止液压缸内部油液回流。
伺服电机直驱液压泵的泵控液压系统具有寿命长、抗污染能力好、体积小巧,易于实现换向、调速,控制方便灵活,没有节流损失,能源利用效率高等特点。
3 直驱泵控液压系统数学模型
3.1 伺服电机数学模型
忽略电机运行过程中的舜变过程,可将交流伺服电机的传递函数表示为如图3所示。

图3 交流伺服电机传递函数框图
图3中,Te为电机的电磁转矩,N·m;T1为电机的负载转矩,N·m;ωp为电机角速度,rad/s;D为电机的摩擦阻尼,N·m/(rad/s);JT为电机的转子以及负载折算到电机输出轴的转动惯量,kg·m2;uc为伺服控制器的输入电压,V;U1为电机定子相电压,V;f1为电源频率,Hz;ku为电压频率转换系数,Hz/V。
3.2 泵控液压缸数学模型
1)定量泵流量方程表示
qp=Dpωp-Cip(p1-p2)-Cepp1
(1)
式中Dp为定量泵排量,m3/rad;ωp为定量泵转速,rad/s;Cip,Cep分别为定量泵内外泄漏系数,m3/P·s;p1,p2分别为高、低压腔的压力,Pa。
将式(1)进行拉普拉斯变换后得到
Qp(s)=Dpωp(s)-Ctpp1(s)
(2)
式中Ctp为定量泵总泄漏系数,m3/P·s。
2)液压缸流量连续性方程表示
(3)
式中 Cic,Cec分别为液压缸内外泄漏系数,m3/P·s;Ap为液压缸活塞杆的有效作用面积,m2;xp为液压缸中位位移,m;V0为液压缸高压腔的容积,m3;βe为有效体积弹性模量。
将式(3)进行拉普拉斯变换后得到
(4)
式中Ctc为液压缸总泄漏系数,m3/(P·s)。
3)液压缸与负载力平衡方程表示
(5)
式中 Fg为液压缸的输出力,N;mt为负载和活塞杆的质量,kg;Bp为负载粘性阻尼系数,N/(m/s);k为负载刚度,N/m;FL为负载力,F。
将式(5)进行拉普拉斯变换后得到
Fg(s)=ApP1(s)
=mts2XP(s)+BpsXP(s)+kXP(s)+FL(s)
(6)
根据式(2)、式(4)、式(6)可得泵控液压缸的传递函数框图如图4所示。

图4 泵控液压缸的传递函数框图
3.3 系统数学模型
综上所述,结合交流伺服电机数学模型和泵控液压缸的数学模型可得伺服电机直驱液压泵的位置控制系统传递函数框图如图5所示。
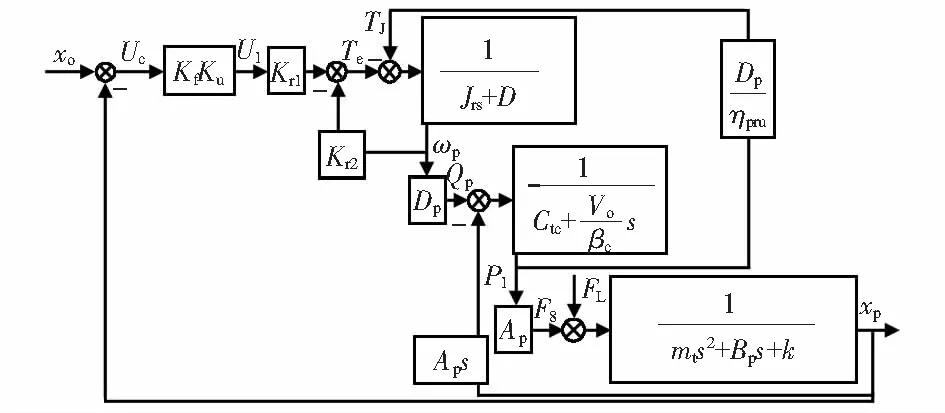
图5 伺服电机直驱液压泵的位置控制系统传递函数框图
4 直驱泵控系统控制方法研究
伺服电机直驱液压泵系统由于电机的启动和转向过程中存在滞后性,使用常规PID算法的控制效果较差,因此,本文使用模糊PID算法对伺服电机直驱液压泵系统进行控制。
模糊PID算法是结合常规PID算法和模糊控制算法的一种智能控制算法,利用由领域专家和技术人员制定的模糊推理规则,根据控制对象实时反馈的偏差和偏差变化率在线调节PID的比例、积分和微分参数。模糊PID控制系统原理如图6所示[9,10]。

图6 模糊PID控制系统原理
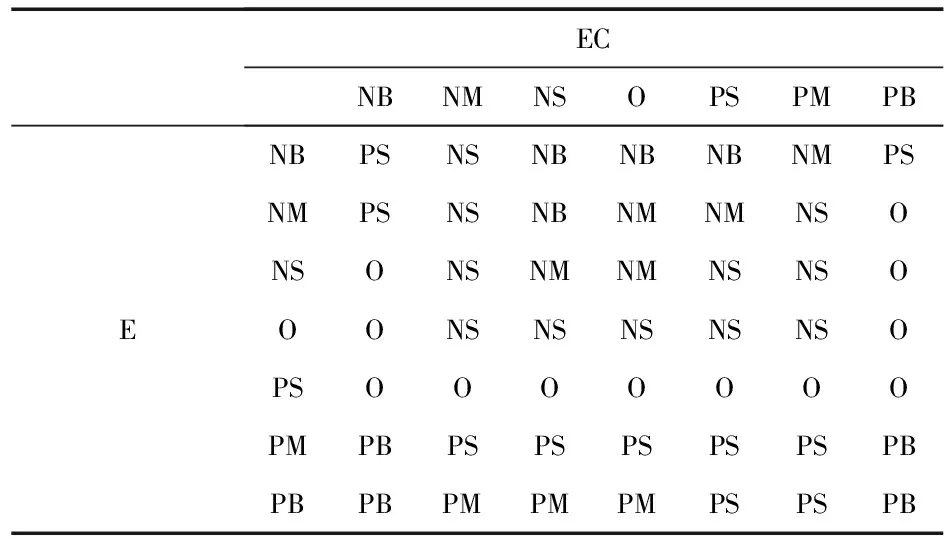
令模糊PID控制器的输入变量为偏差e和偏差变化率ec,其输出为比例、积分和微分参数的增量Δkp,Δki,Δkd。令输入和输出变量的模糊自己为{NB,NM,NS,ZO,PS,PM,PB},同时,并使用精度较高的三角形隶属度函数。
根据实际经验和专家经验建立Δkp,Δki,Δkd, 模糊控制规则,见表1~表3所示。
输入变量为偏差e和偏差变化率ec的基本论域为:e:[-10,10],ec:[-5,5],输出变量Δkp,Δki,kd的基本论域为:Δkp:[-3,3],Δki:[-3,3],Δkd:[-0.6,0.6];为了便于计算将输入和输出变量的论域转换为e∈[-5,5],ec∈[-5,5],Δkp∈[-1,1],Δki∈[-1,1],Δkd∈[-1,1]。各个参数的量化因子为
表1 Δkp模糊控制规则

ECNBNMNSOPSPMPBNBPBPBPMPMPSOONMPBPBPMPSPSONSNSPMPMPMPSONSNSEOPMPMPSONSNMNMPSPSPSONSNSNMNMPMPSONSNMNMNMNBPBOONMNMNMNBNB
表2 Δki模糊控制规则

ECNBNMNSOPSPMPBNBNBNBNMNMNSOONMNBNBNMNSNSOONSNBNMNSNSOPSPSEONMNMNSOPSPMPMPSNSNSOPSPSPMPBPMOOPSPSPMPBPBPBOOPSPMPMPBPB
表3 Δkd模糊控制规则
ECNBNMNSOPSPMPBNBPSNSNBNBNBNMPSNMPSNSNBNMNMNSONSONSNMNMNSNSOEOONSNSNSNSNSOPSOOOOOOOPMPBPSPSPSPSPSPBPBPBPMPMPMPSPSPB
(7)
式中 ke和kec为误差和误差变化量的量化因子;kup,kui,kud为比例因子;n和m分布为误差和误差变化率的论域最大值;emax和ecmax为误差和误差变化率的基本论域最大值;l和umax分别为PID调节参数模糊论域和基本论域的最大值。
综上,PID控制器的输入参数为
(8)
式中 Kp,Ki,Kd为常规PID控制器的输入参数;kp0,ki0,kd0为PID控制器的比例、积分和微分参数初值;Δkp,Δki,Δkd为模糊控制器根据系统的偏差e和偏差变化率ec以及制定模糊规则的输出值[11~17]。
5 仿真和实验分析
使用Matlab/Simulink仿真软件建立本文研究的直驱泵控巷道超前支架控制系统的仿真模型,并建立超前支架的实验样机,使用常规PID与模糊PID算法进行对比研究,巷道超前支架的系统参数如表4所示。
表4 巷道超前支架的系统参数

参数设置参数设置电机折算转动惯量/(kg·m2)0.03液压缸有效作用面积/m22.71×10-3系统最大压力/MPa10泵排量/(mL/r)32.8缸径/mm63顶梁弹簧刚度/(N·m-1)5×106液压缸质量/kg60液压油体积模量/MPa700液压缸最大行程/mm150油液绝对粘度/(Pa·s)0.05负载质量/kg250泄漏系数/(m2/Pa·s)7×10-11
仿真模型针对给定阶跃信号和正弦信号的仿真结果如图7所示。
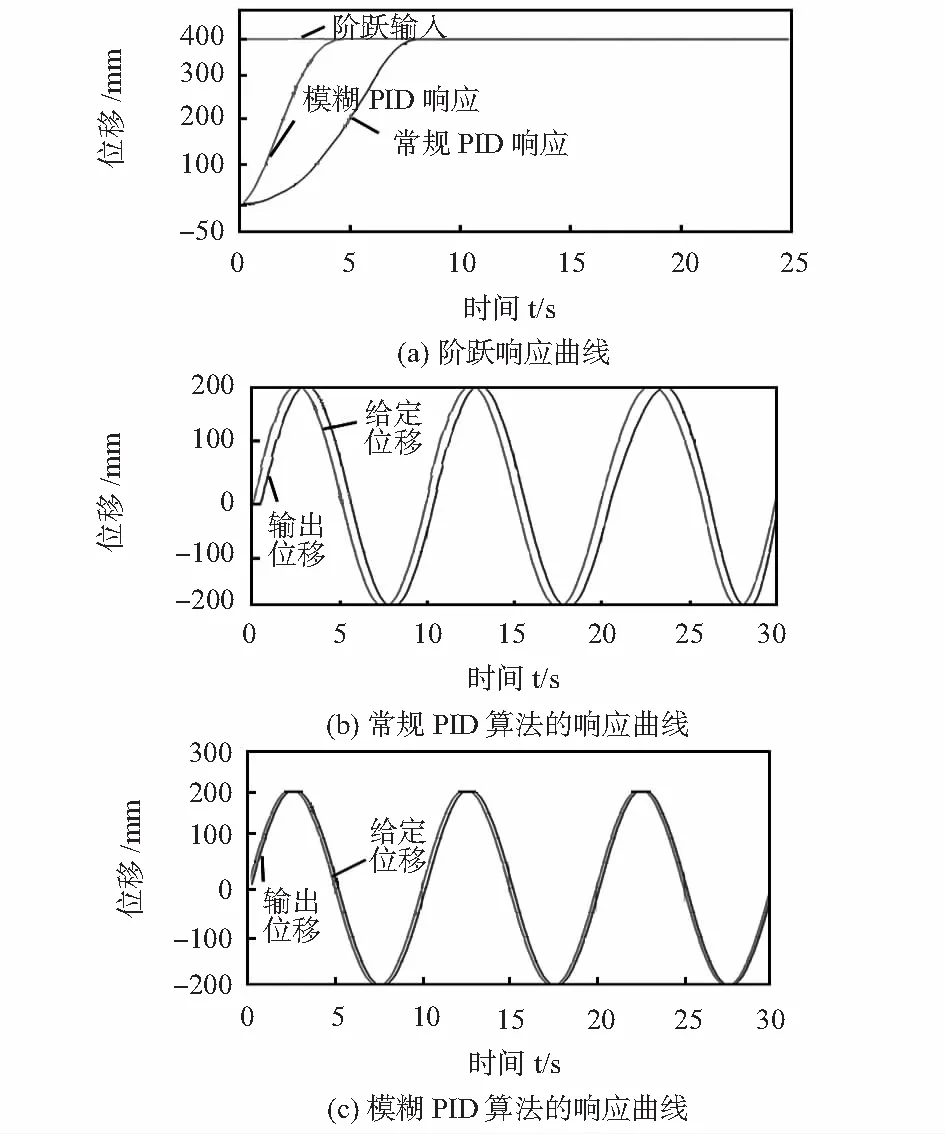
图7 仿真结果曲线
实验模型的阶跃响应曲线如图8所示。
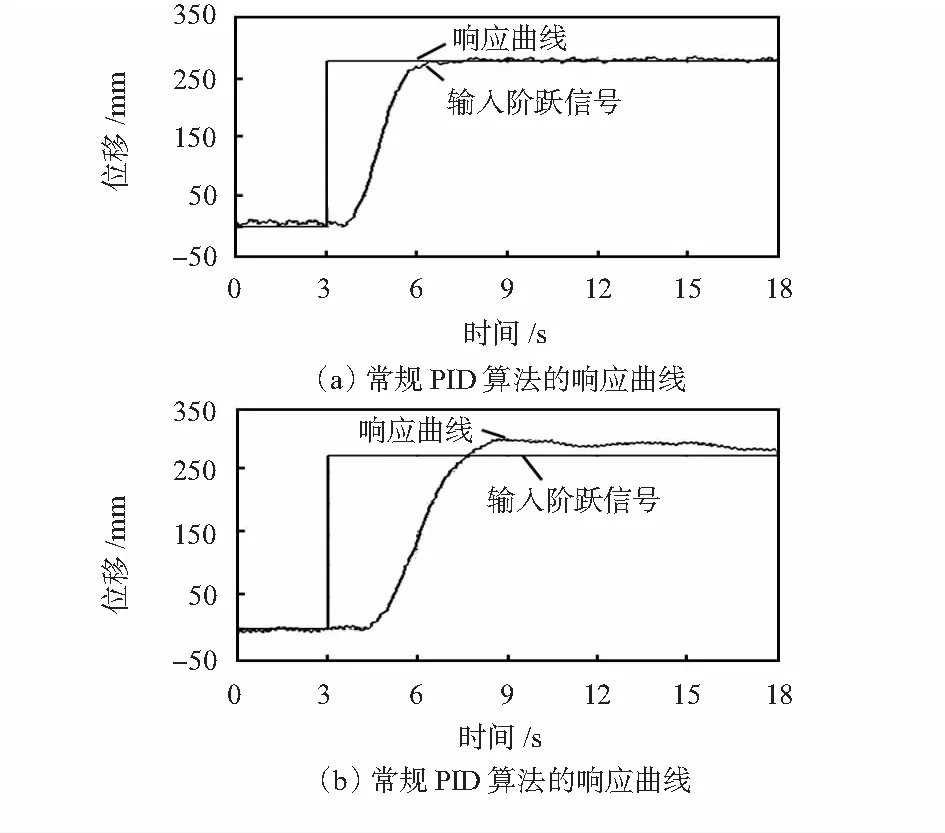
图8 实验结果曲线
6 结 论
使用模糊PID算法作为控制器,通过使用Matlab仿真和实验方法进行研究,结果表明:模糊PID算法作用下,伺服电机直驱液压泵的超前支架液压缸位置变化的超调量更低,调整速度更快,能够快速跟踪给定信号曲线,具有较好的鲁棒性。
[1] 卢进南,毛 君,谢 苗,张 睿.巷道超前支架全支撑态动力学模型[J].煤炭学报,2015(1):50-57.
[2] 谢 苗,白雅静,毛 君,等.不同工况下超前支护装备的模态分析[J].工程设计学报,2015(3):236-242.
[3] 毛 君,郑广辉,谢 苗,等.模糊PID的超前支护装备支撑力自动控制系统[J].智能系统学报,2015(5):762-768.
[4] 谢 苗,刘治翔,鲁启通,等.超前支架迈步过程稳定控制方法研究[J].中国安全科学学报,2015(3):54-59.
[5] 谢 苗,刘治翔,毛 君,等.巷道超前支护装备降架过程控制方法的研究[J].工程设计学报,2015(4):365-371.
[6] 毛 君,杨振华,卢进南,等.迈步式超前支护装备过渡过程支撑力控制系统设计[J].工程设计学报,2015(4):387-393.
[7] 谢 苗,刘治翔,池 城,等.巷道超前支架的电液伺服位置压力复合控制方法[J].中国机械工程,2016(2):1-7.
[8] 谢 苗,刘治翔,毛 君.综掘巷道超前支护装备多缸同步控制方法研究[J].工程设计学报,2015(2):193-200.
[9] 蒋 伟.模糊自适应PID控制算法在电液伺服系统中的应用[D].南京:南京理工大学,2004:3-9
[10] 唐 亮,陆明刚,施银中.一种新型高层恒压智能供水系统研究[J].传感器与微系统,2013,32(1):53-55.
[11] 曹春平,孙 宇.液压机压边力模糊PID智能控制系统研究[J].中国机械工程,2010,21(21):2551-2554.
[12] 张贯宇,田建艳,张维杰,等.基于模糊神经网络参数整定的仿人智能控制[J].传感器与微系统,2013,32(10):30-33.
[13] 张 静,李茂军,袁卓异,等.变频恒压供水系统模糊PID混合控制策略研究[J].传感器与微系统,2013,32(5):68-70.
[14] 王 琢,闵昆龙,白雪冰,等.气体传感器中半导体激光器的温度控制[J].传感器与微系统,2013,32(6):43-46.
[15] 汤斌斌,陈敏芳,熊伟丽,等.一种模糊自适应PID控制在溶解氧中的应用[J].传感器与微系统,2013,32(7):144-147.
[16] 陈 波,魏 彬,叶凌云.温控系统区域间温度场耦合补偿方法研究[J].传感器与微系统,2013,32(9):72-74.
[17] 褚红伟,陈友兴,王召巴.火炸药烘干过程中的温度控制系统设计[J].传感器与微系统,2014,32(3):89-91.
蒋家宁,通讯作者,硕士研究生,E—mail:jjnpaper@163.com。
Research on control method of advanced support cylinder based on direct drive electro hydraulic system*
XIE Miao, JIANG Jia-ning
(College of Mechanical Engineering,Liaoning Technical University,Fuxin 123000,China)
Considering the traditional valve control hydraulic system of servo valve is easy to be polluted by oil and cannot work normally,efficiency of valve controlled hydraulic system is low,throttling loss is large,resulting in energy waste problem.Servo motor direct drive hydraulic pump system due to the motor starting and turning process lags,so use the routine PID control effect is poor,fuzzy PID control algorithm is used to control servo motor direct drive hydraulic pump system.Using Matlab / Simulink simulation software,direct drive pump control fore support of roadway control system simulation model is established,and the establishment of advanced experimental support,using conventional PID and fuzzy PID algorithm are compared.The results of the study show that fuzzy PID algorithm,servo motor direct drive hydraulic pump of in advance hydraulic cylinder position changes of overshoot is lower,adjusting speed is faster and capable of fast tracking curve of given signal,and has good robustness.
advanced support; hydraulic system; control system of direct drive pump; fuzzy control
10.13873/J.1000—9787(2017)02—0042—04
2016—03—14
国家自然科学基金资助项目(51304107); 辽宁省教育厅科学研究一般项目(L2012118);辽宁省煤矿液压技术与装备工程研究中心开放基金资助项目(CMHT—201206);辽宁省教育厅创新团队资助项目(LT2013009)
TH 113
A
1000—9787(2017)02—0042—04
谢 苗(1980-),女,博士,副教授,博士生导师,主要从事机械系统理论及设计。
