基于滑模观测器的永磁同步电机无速度传感器控制
2017-02-17中车株洲电机有限公司马文斌周永欣
中车株洲电机有限公司 马文斌 周永欣
基于滑模观测器的永磁同步电机无速度传感器控制
中车株洲电机有限公司 马文斌 周永欣
永磁同步电机因其具有高功率、高转矩密度、高效率以及宽调速范围等特点,使其在工业伺服、新能源汽车等领域得到越来越广泛的应用。为实现对永磁同步电机控制,需要使用光电编码器等速度传感器来获得电机转子准确位置。而使用速度传感器将提高系统的成本,同时降低系统可靠性。本文在分析永磁同步电机数学模型上,构建同步电机转子观测器实现了对永磁同步电机的无速度传感器矢量控制
永磁同步电机;无速度传感器;矢量控制
1.引言
永磁同步电动机(PMSM)具有高效率和高功率因数、高启动转矩,高功率密度比等优点[1]。因此,随着高性能稀土永磁材料钕铁硼在同步电机中得到推广和普及,永磁同步电机性能得到大幅提升,使得其在铁路牵引、工业伺服乃至新能源汽车驱动领域都得到了越来越广泛的应用[2]。然而,传统永磁同步电机中使用的光电编码器、旋转变压器等机械式速度传感器使得电机制造工艺变得复杂,同时显著提升了永磁同步电机制造及维护难度。机械式速度传感器同时也限制了电机的微型化、降低了系统可靠程度。因此,永磁同步电机的无速度传感器控制研究成为了国内外工程技术人员的研究热点[3]。无速度传感器控制是通过观测电机转动过程中电流、反电动势等物理量估算出电机转子的准确位置来替代机械式速度传感器。目前无速度传感器控制主要有两种技术路线:1)内埋式永磁同步电机空间凸极效应观测;2)状态观测器法,通过电机转动时对反电动势等参数的估测获得电机转子的位置信息,观测器法主要有扩展卡尔曼滤波器、龙贝格观测器等基于电机模型的位置观测法。本文研究过程中采用了具有良好的鲁棒性及快速性的滑模观测器方法,在未增加硬件的前提下,在低速阶段通过恒压频比将同步电机启动后,触发滑模观测器获得转子位置信息,实现对永磁同步电机的无传感器矢量控制。
2.滑模观测器构建
2.1 永磁同步电机滑模观测器设计
在电机αβ坐标系下永磁同步电机数学模型如方程(1)所示,电机反电动势方程如方程(2)所示:

公式中iα;iβ和Vα;Vβ和eα;eβ是电机αβ坐标系下电流、电压以及反电动势分量,R和L则为电机的定子电阻和电感。

公式中:k为电机反电动势常数,为电机转速,为转子位置角。
在永磁同步电机数学模型基础上,构建滑动模式观测器基本结构如图1所示:
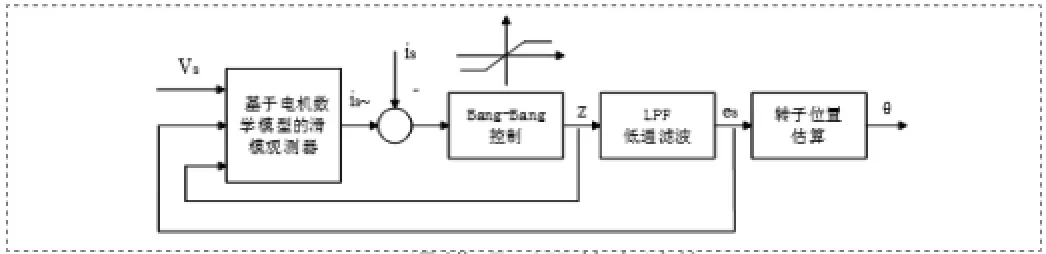
图1 滑模观测器基本结构
αβ坐标系下永磁同步电机滑模观测器基本结构数学方程如下:

式中系数k为滑模增益。
运转电机中的反电动势可以通过公式(4)中参数Z进行低通滤波后得到,如公式(5)所示,公式中f0为一阶低通滤波器的截止频率。

得到电机运行状态下反电动势估测值电机转子位置可以通过公式 计算得到:

至此电机运行状态下电机转子位置信息可以计算得出。
2.2 滑模观测法仿真研究
基于滑模观测器的永磁同步电机无速度传感器控制系统结构如图2所示。
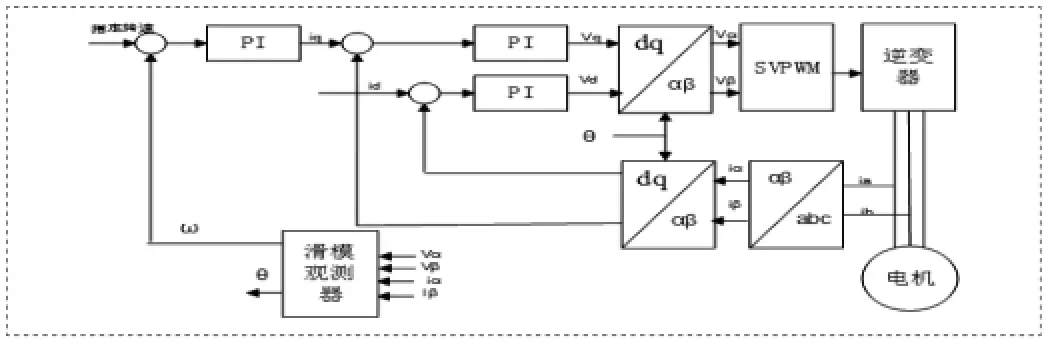
图2 永磁同步电机无传感器控制系统图
图2 所示控制系统框图中使用了滑模观测器驱动传统机械式速度传感器获取永磁同步电机转子位置与电机运行速度。使用MATLAB软件SIMULINK模块对滑模传感器进行仿真验证,所使用的额定功率2.2kW的永磁同步电机参数如下:
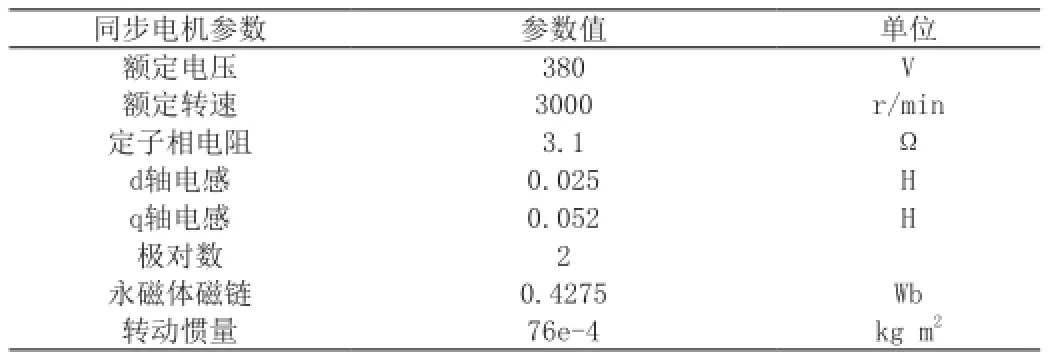
表 仿真验证用电机参数
Simulink模块仿真永磁同步电机转子位置波形如图3所示。图3中可见滑模观测器构成的无速度传感器控制系统性能较好。
3.实验平台搭建
如图4所示永磁同步电机无速度传感器控制系统由德州仪器TMS320F28335型DSP为主控核,该DSP具有哈佛总线结构,150MHz主频,UART、CAN等功能,适用于电机控制系统。DSP完成永磁同步电机的矢量控制运算及无速度传感器算法运算,同时DSP通过CAN、RS232及RS485等接口完成与上位机及其他控制设备的通信。IGBT驱动核选择了PI公司2SD106,2SD106驱动内核具备检测igbt集电极发射极电压Vcesat从而实现短路保护、过流保护等功能,功率器件选用英飞凌公司FS100R12KE3型IGBT模块,硬件电路同时具备直流母线电压采样、电机三相电流隔离采样等。
