基于三维软件的麦克纳姆轮移动平台悬架系统研究
2017-02-09卢浩文谢佳洽李泽寰陈灿琼
卢浩文++谢佳洽++李泽寰++陈灿琼++高泽轩++曾俊皓

摘要:在过去的几年来,众多载重能力强的移动平台争相出现,而以麦克纳姆轮为代表的全向移动平台以其优异的全向移动能力及载重能力强出名。由于麦克纳姆轮自身结构不足的原因,麦克纳姆的悬架系统变得尤为重要。这篇文章就从麦克纳姆轮自身结构的角度入手,利用三维软件SolidWorks进行分析,探讨麦克纳姆轮的悬架系统。
关键词:麦克纳姆轮 全向移动 SolidWorks 悬架系统
中图分类号:TP399 文献标识码:A 文章编号:1007-9416(2016)11-0039-01
Abstract:In the past few years, a large number of heavy-duty mobile platforms appear, Mecanum Wheel as the representative of mobile platform is well know with its excellent omnidirectional mobility and strong load capacity. Mecanum's suspension system becomes particularly important because of the Mecanum's own structural weaknesses. This article starts from the Mecanum wheel's own structural. The 3D software SolidWorks for analysis, to explore Mecanum wheel suspension system.
Key Words:Mecanum;Omnidirectional mobility;SolidWorks; Suspension system
1 引言
以麦克纳姆轮为主动轮的全向移动平台,可在二维平面内向任意方向移动的高精度移动设备。当若干个的麦克纳姆轮在一定的排列组合下,通过单独控制每个麦克纳姆的转速、转向,即可实现车的直行、横移、斜行、原地旋转、各种连续曲线的移动。运动灵活,通过位置伺服进行细微调整可实现精确定位和轨迹控制。
作为平面高精度移动设备可运用于航空航天、船舶、工程机械、仓储物流、科研教学等等众多领域。如KUKA公司推出的全向移动平台omniMove、上海汇聚自动化科技有限公司的HJ575-H8d。国内部分院校及研究单位正在进行麦克纳姆轮机器人及相关设备的研究。目前,较为热门的方向为仓储物流,如亚马逊仓库机器人Kiva,其特点为体积小、载重能力强。
由于麦克纳姆轮的自身结构特点,为达到高精度轨迹控制和精确定位需对将麦克纳姆轮与平台车架之间的悬架系统进行研究,降低因麦克纳姆轮自身结构的影响。
2 麦克纳姆轮结构
麦克纳姆轮由若干个辊子、轮毂、支撑芯、轴承、螺栓螺母等组成。
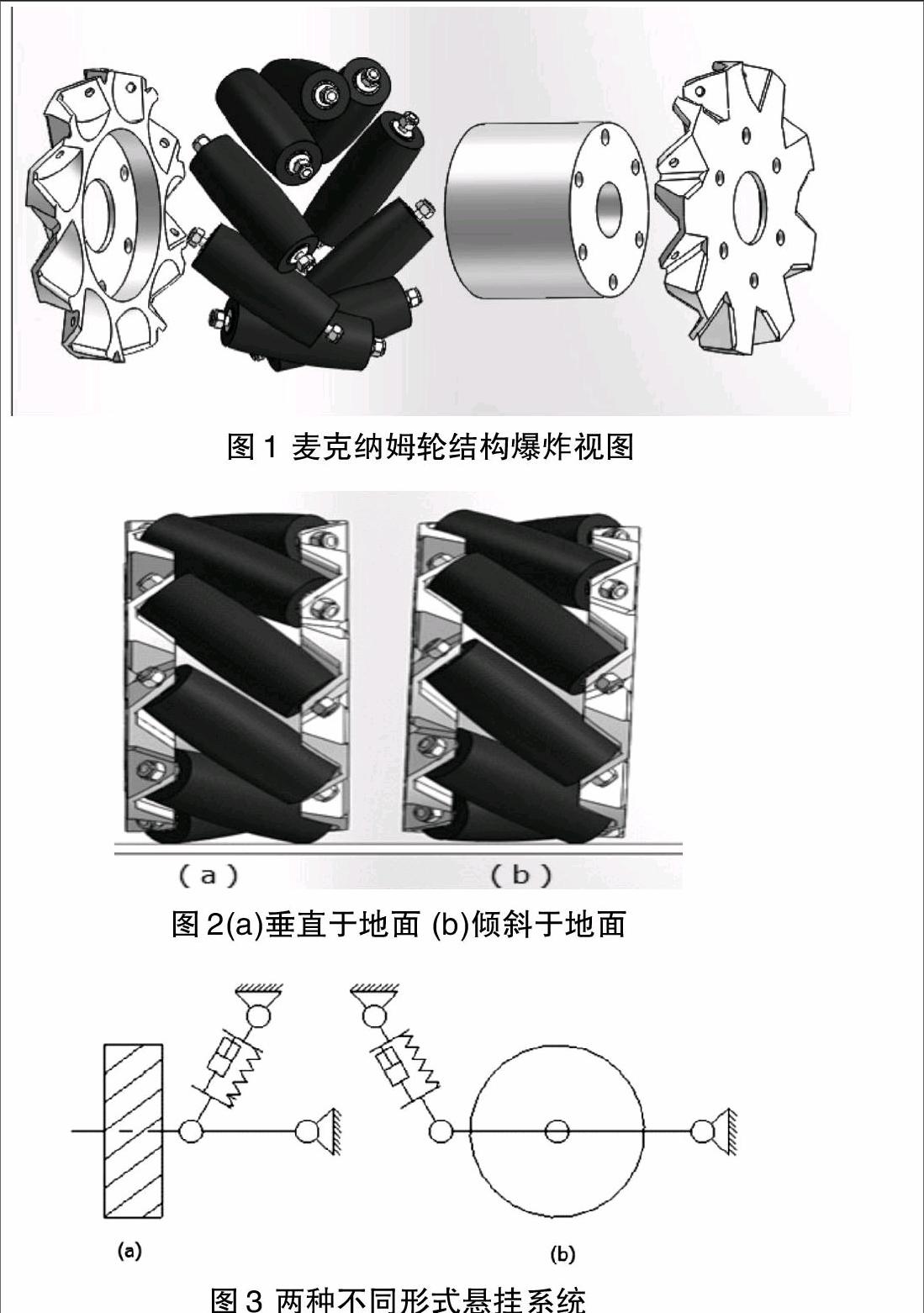
麦克纳姆轮与普通轮本质区别在于当轮绕轮轴轴心旋转过程中,普通轮仅有前进或后退的运动趋势,而麦克纳姆轮在二维x-y平面上拥有x和y的运动趋势。在三维软件SolidWorks中容易发现这一特性。辊子在两侧的轮毂夹持的情况下时,辊子可以绕辊子轴心旋转,同时辊子可以绕轮毂轴心旋转,麦克纳姆轮结构爆炸视图如图1所示。由于单个麦克纳姆轮的运动方向不确定性,所以在多个麦克纳姆轮按照一定排列顺序以及单独控制每个麦克纳姆轮的转向、转速即可使由麦克纳姆轮组成的移动平台达到全向移动的能力。
3 悬架系统设计
3.1 悬架系统结构分析
麦克纳姆轮的轮缘是不连续的环面, 由一系列不连续的斜置被动辊子包络形成,这若干个在被动棍子在轮毂带动下,与地面发生依次接触。不连续的辊子导致麦克纳姆轮运动时产生垂直方向振动,这些意外的振动会减少定位精度,以及整体平稳性。为保证四轮全向移动平台移动的四轮输出均能得到有效利用,则需至少在一个轮上进行悬挂,保证四轮同时着地。为减缓由于麦克纳姆轮自身结构产生垂直振动,最优方式为四轮均安装独立悬挂。
麦克纳姆轮由于其轮缘是不连续环面,在运动过程中通常只有一个到两个辊子与被动地面接触,从图2(b)可以发现当麦克纳姆轮稍微向轮壳一侧倾斜的话,麦克纳姆将会受力将会集中在倾斜一侧的辊子上,当悬挂方式为这种情况的话,麦克纳姆轮辊子将会出现辊子磨损不一致、轮毂受力不均匀,极大减短麦克纳姆轮的寿命。麦克纳姆轮的轮毂一旦变形意味着麦克纳姆轮报废,这极大增加使用成本,综上来说麦克纳姆轮悬挂系统应尽可能保持麦克纳姆轮垂直于地面。
悬挂的形式大致可以分为两种:
(1)绕轮轴外一点为铰接点进行悬挂如图3(a)。
(2)垂直于轮轴的平面上的一点铰接进行悬挂如图3(b)。
3.2 悬架结构方案对比分析
由麦克纳姆轮组成的全向移动平台多用于仓库物流、工程机 械科研教学等众多领域。其相应的移动平台应尽可能设计尺寸矮、载重能力强。这有利于装载或卸载物品,同时,尺寸较小的全向移动平台能节约仓库的设计生产成本,同时提高了安全性。
由于麦克纳姆轮不同于普通轮,其结构的独特性,导致它只需要控制全向移动平台上轮毂的转速和转向,进行复合运动即可完成全向移动,所以在这一方面,麦克纳姆轮悬架系统并不需要转向机构,只需全程关注于如何使麦克纳姆轮垂直于地面的问题。这样极大的简化悬架系统的结构,可以减去转向机构。同时,当全向移动平台在横向或斜线移动时,由于车速较为低速,出于安全以及惯性的考虑,可以忽略侧倾的发生。
3.3 确定悬架结构方案
(1)四轮全向轮平台的设计尺寸较小,在选取悬架结构形式时,应尽量选取结构较紧凑、尺寸较小的悬架结构形式。
(2)尽量保持麦克纳姆轮垂直,减缓被动辊子损耗。
由此可以确定悬架结构从结构简便性以及减缓麦克纳姆轮磨损的应选用能使每个麦克纳姆轮垂直于地面进行跳动的悬挂,即垂直于轮轴的平面上的一点进行铰接进行悬挂。
