神经网络在机械臂轨迹规划中的应用研究
2017-02-04唐瑞华
唐瑞华
神经网络在机械臂轨迹规划中的应用研究
唐瑞华
巢湖学院,安徽 巢湖 238000
介绍了机械臂运动学的理论基础以及在 MATLAB 中的正运动学仿真,验证了模型的合理性和有效性。然后重点探讨了神经网络实现基本轨迹的求逆和跟踪,对关节角允许范围内的随机角度进行了训练测试,结果良好。
神经网络;机械臂;轨迹规划
引言
随着机械电子科学技术的高速发展,工业机器人之一的机械臂一直在努力提高工作效率和节约生产成本,从而提高产品的性能。智能型机械臂集成了计算机技术、软件技术、电子技术等,在实际工作过程中能够对工作环境做出敏捷的反应,从而保证工作质量。
在机械臂的现实应用过程中,评价它工作好坏的主要标准是工作的高效性和可靠性。实际工作过程中会出现启动时的不稳定、定位时的精度等难题,大多数会造成硬件结构和机械构件发生一定的磨损。因此,为了改变不稳定性,就需要我们规划更好的运动轨迹,从而让它表现出光滑而又连续的平滑曲线。理论上它的抖动和角度突变这种问题是避免不了的,但我们能尽量减小磨损。平稳运行必须是建立在规划好它的末端运动轨迹的基础,然后通过大量仿真结果来分析它的具体运动规律[1]。
1 轨迹规划概述
根据机械臂要执行任务的不同来划分机械臂轨迹的规划,大致可以分为两种:一种是给始末点,只要让机械臂末端从始点运动到终点,至于中间是怎么走的,它不做要求;另一种是给定末端的轨迹在让它沿着轨迹运动[2]。
机械臂轨迹规划往往是在理解了机械臂所需要满足的角加速度、角速度、角加速度变化量和生成该轨迹的方式建立在沿力矩等一系列约束的基础上,而且过程也需要一些约束条件,还要考虑是在哪种空间进行规划比较方便。
(1)任务描述;
(2)将计算得到的轨迹转化计算机语言,进而在计算机内来描述通过计算所获得的轨迹;
(3)实时计算。通常处理这类问题时把它设计成一个轨迹规划器。这个规划器相当于一个盒子,不需要知道里面的结构和布局,只要给它一定的约束条件,就可以得出我们想要的结果了。所以我们只需输入相关轨迹约束并对轨迹进行简单计算机描述,然后它就能够简化任务描述,至于规划过程中的细节问题不需要弄清楚,系统本身会处理掉这类问题[3]。
在给定机械臂运行轨迹的始末端之间,肯定有很多种可能的曲线,这些曲线都可能是要求解的轨迹。如果在计算过程中某些参数必须用关节坐标表示,就可以应用逆运动学来将笛卡尔坐标值转换为关节坐标值。关节变量和机械臂运行之间是关于时间的函数,同时规划该函数的一、二阶导数分别来描述机械臂运动过程中机械臂各关节的角速度变化和角加速度变化规律。

图1 轨迹规划原理图
机械臂的轨迹选择取决于要规划的曲线,但是不管选定在哪种空间下,我们的目的都是一样的。对于不同任务的机械臂而言,不管选用哪种函数规划轨迹,这些曲线都要保持连续性,然而对于不同的轨迹要求对应不同的规划方法。不管怎样,实现规划都离不开插值计算,依照轨迹要求精度的高低将插值计算划分为如下两种:(1)定时插补;(2)定距插补。
2 神经网络模型
ANN是通过模拟人脑神经系统而建立起来的一种模型,并且具有并行处理信息的能力,为复杂系统求解提供了一种新的解决方法。ANN的核心是针对不同结构类型算法,其中以误差反向传播算法——BP神经网络(Back Propagation)发展得最为成熟。BP神经网络有很多优点。当隐含层或神经元的个数足够多时,可以逼近任何非线性模型;网络权值进行求解通过以全局逼近的方式,信息分布在神经元与神经元之间的网络权值之中,所以BP网络具有较好的鲁棒性和容错性[4]。
BP神经网络实质上是一个单向传播的多层前向反馈网络,其结构如图2所示。主要包括三个部分:输入层、隐含层及输出层。BP神经网络的学习由信号的正向传播和误差的反向两部分构成,如图3所示。当实际输出值与期望值相差比较大时,要计算其具体的误差变化,通过利用梯度下降法不断修改各层神经元的权值与阈值直至误差信号达到期望的目标为止。

图2 多层前馈网络结构图
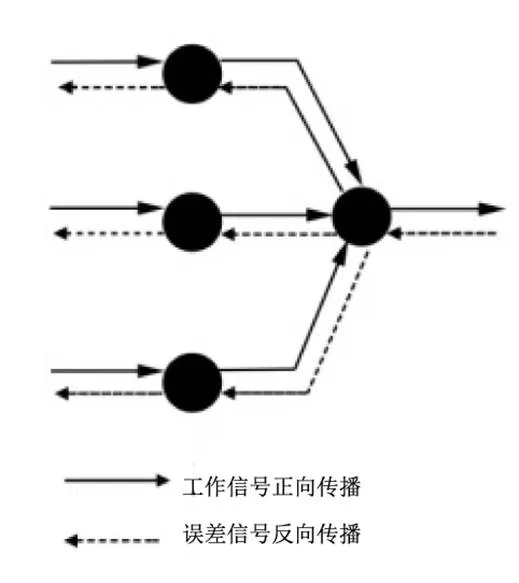
图3 BP神经网络学习过程图
3 逆运动学求解仿真
3.1 求解思路
本文提出了一种结合BP来求解机械手逆运动学问题,从而将机械手逆运动学问题转化为训练神经网络权值及阈值的问题。
针对PUMA560机械手,所谓的逆运动学问题就是在已知机械手末端执行器位姿0A6的条件下,如何求解各关节变量θ1 、θ2 、θ3 、θ4、θ5、θ6。由于0A6的第四行的四个元素为常数,因此选择其余的12个元素作为整个网络的输入,输入向量为q=[nx ny nz ox oy oz ax ay az Px Py Pz],6个关节角作为整个神经网络的输出,输出向量为Z=[θ1 θ2 θ3 θ4 θ5 θ6][5]。
BP神经网络隐含层节点选取至关重要,节点数目太少,网络不能训练,节点数目太多网络的泛化能力也会下降。对机械手逆运动学进行求解的步骤为:(1)产生数据样本集;(2)网络的初始化;(3)选取训练样本和测试样本。(4)利用训练样本对并行神经网络进行训练;(5)网络训练结束后,使用测试样本对整个并行网络进行测试,将网络中误差最小的那组关节角输出作为整个网络最终的输出[6]。
3.2 仿真分析


表1 训练对比表
4 总结
仿真实验结果表明,本文提出的基于神经网络的机械手逆运动学求解方法简单实用,训练后的并行神经网络收敛速度快,求解精度高,能够满足机械手实时控制中对高速求解逆运动学问题的要求,克服了传统逆运动学求解方法计算量大、精度低、收敛速度慢等诸多缺陷,为机械手逆运动学求解问题提供了一种新的解决方案。
[1]钱庆文.基于STM32的类人机器人控制系统的研究[D].哈尔滨:哈尔滨理工大学,2014.
[2]王亮.搬运机械手运动控制的研究[D].太原:太原科技大学,2012.
[3]周刚.垂直关节型6自由度机器人笛卡尔空间轨迹规划的研究[D].广州:华南理工大学,2011.
[4]林仕高.搬运机器人笛卡尔空间轨迹规划研究[D].广州:华南理工大学,2013.
[5]王秋玥,方明.基于多空间混合约束的NAO机器人抓取轨迹规划[J].长春理工大学学报(自然科学版),2014(6):107-110.
[6]王涛.基于Matlab仿真的机器手臂笛卡尔轨迹规划[J].湖南文理学院学报(自然科学版),2015(4):20-24.
[7]黎柏春,杨建宇,耿磊,等.基于实时逆运动学算法的6R机器人三维仿真[J].组合机床与自动化加工技术,2014(3):45-48.
[8]王凯凯,万衡.机器手臂轨迹规划[J].制造业自动化,2015(13):8-11.
The Application of Neural Network in the Trajectory Planning of Mechanical Arm
Tang Ruihua
Chaohu College, Anhui Chaohu 238000
The paper introduces the theoretical basis of kinematics of manipulator and the forward kinematics simulation in MATLAB, and verifies the rationality and validity of the model. Then, it focuses on the inverse and tracking of the neural network to realize the basic trajectory, and the training test is conducted on the random Angle of the joint Angle, and the result is good.
neural network; mechanical arm; trajectory planning
TP241;TP183
A
1009-6434(2017)10-0014-03
唐瑞华(1971—),女,汉族,重庆人,巢湖学院讲师,物理学硕士,主要研究方向为计算物理和材料物理。
