转子串电容的三相电动机机械特性探究与仿真
2017-02-02张德孝
张德孝
转子串电容的三相电动机机械特性探究与仿真
张德孝
(渤海船舶职业学院, 辽宁兴城 125105)
在三相异步电动机的转子绕组串接电容,能够获得非常理想的单值函数的起动机械特性。探究了当转子串电阻、降低电源电压、降低电源频率时的起动特性,并进行了MATLAB仿真。
三相异步电动机 机械特性 电容 MATLAB仿真
0 引言
三相异步电动机机械特性=()起动初始段为多值函数,这一缺点可以通过在其转子导条或绕组中串联电容的方式进行校正,从而得到接近恒转矩且较软的机械特性,其起动转矩巨大且适合于重载起动。在此前提下,探究三相异步电动机在转子串电阻、降低电源电压、降低电源频率时的起动特性并进行MATLAB仿真,意义重大,能够使其应用场合更加宽广。在转子回路串接校正电容后的三相异步电动机,以下简称为“电容转子三相异步电动机”。
1 电容转子三相异步电动机的电路模型与仿真特性
电容转子三相异步电动机的电路模型如图1所示。

由图1可以得出其机械特性为

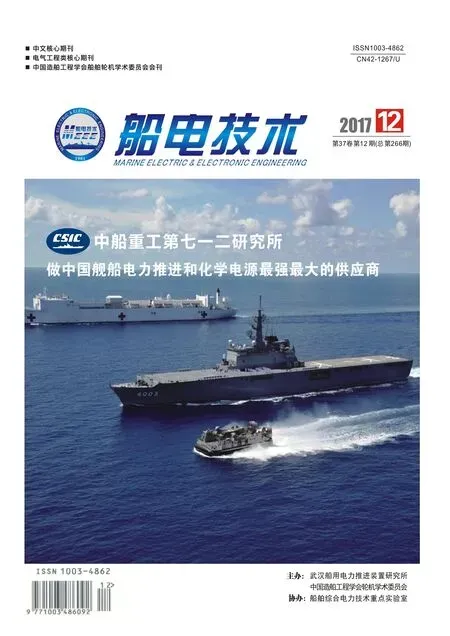
对上述机械特性进行MATLAB仿真,得出校正后的机械特性如图2所示,可以得出:传统三相异步电动机机械特性的缺点能够得以彻底校正。
在进行机械特性仿真试验时,可以选电容C的不同数值来反复进行校验,直到机械特性校正到如图2所示的单值函数理想状态为止。
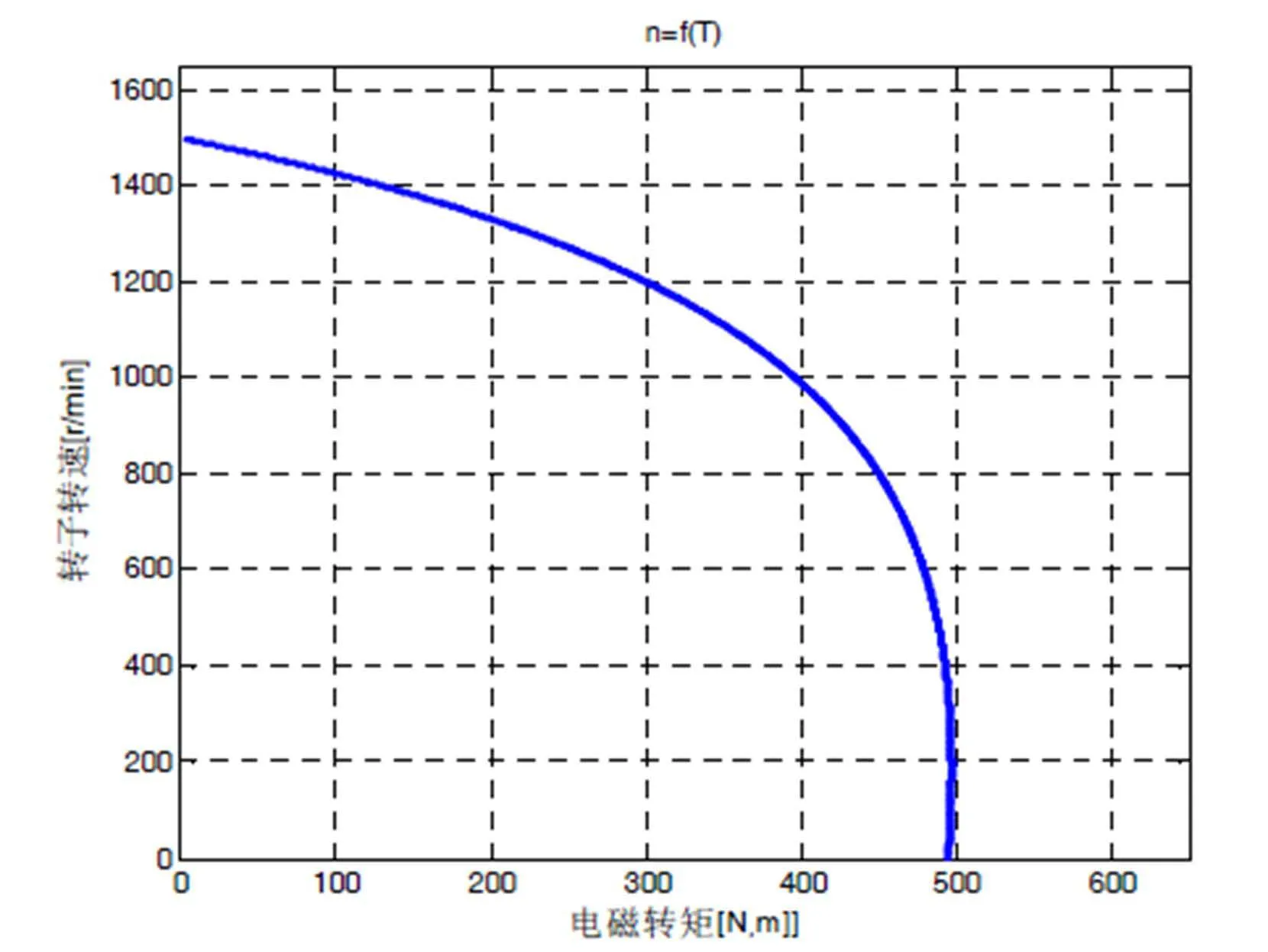
图2 电容转子三相异步电动机机械特性
2 电容转子三相异步电动机串电阻时的机械特性
电容转子三相异步电动机转子串电阻时的机械特性如图3所示。其MATLAB仿真程序如下:
clc
clear
uN=380;f1=50;r1=1.39;r2=1.22;x1=2.41;x2=4.2;p=2;m1=3;n2=1460;c=0.001226; % 电动机参数。
n0=60*f1/p; %同步转速
w=2*pi*f1/p; %系数
x4=68/2*pi*f1*c; %折算到定子侧的容抗
for i=1:4
if i==1
r2=1.2;
elseif i==2
r2=2.4;
elseif i==3
r2=3.6;
elseif i==4
r2=4.8;
end
for n=0:n0
s=(n0-n)/n0;
z=(r1+r2/s)^2+(x1+x2-x4)^2; %折算到定子侧的总阻抗;
t=m1*uN^2*r2/s/w/z; %电动机机械特性;
plot(t,n,'-')
hold on
end
end
xlabel('电磁转矩[N,m]]');ylabel('转子转速[r/min]');
title('n=f(T)')
grid on
axis([0 650 0 1650])
gtext('r1');gtext('r2');gtext('r3');gtext('r4');gtext('r1 图3 电容转子三相异步电动机转子串电阻时的机械特性 特点:起动转矩较大,起动迅速且比较平稳,适合起重机类负载。 电容转子三相异步电动机电源电压降低时的机械特性如图4所示。其MATLAB仿真程序如下: clc clear f1=50;r1=1.39;r2=1.22;x1=2.41;x2=4.2;p=2;m1=3;n2=1460;c=0.001226; % 电动机参数; n0=60*f1/p; %同步转速; w=2*pi*f1/p; %系数; x4=68/2*pi*f1*c; %折算到定子侧的容抗; for i=1:4 if i==1 u1=95; elseif i==2 u1=190; elseif i==3 u1=285; elseif i==4 u1=380; end for n=0:n0 s=(n0-n)/n0; z=(r1+r2/s)^2+(x1+x2-x4)^2; %折算到定子侧的总阻抗; t=m1*u1^2*r2/s/w/z; %电动机机械特性; plot(t,n,'-') hold on end end xlabel('电磁转矩[N,m]]');ylabel('转子转速[r/min]'); title('n=f(T)') grid on axis([0 650 0 1650]) gtext('u1');gtext('u2');gtext('u3');gtext('u4');gtext('u1 图4 电容转子三相异步电动机电源电压降低时的机械特性 特点:起动转矩随电压下降而显著降低,具有近似恒转矩起动特性,适合风机类负载。 电容转子三相异步电动机降低电源频率时的机械特性如图5所示。其MATLAB仿真程序如下: clc clear uN=380;r1=1.39;r2=1.22;x1=2.41;x2=4.2;p=2;m1=3;n2=1460;c=0.001226; % 电动机参数。 for i=1:4 if i==1 f1=12.5; elseif i==2 f1=25; elseif i==3 f1=37.5; elseif i==4 f1=50; end n0=60*f1/p; %同步转速; w=2*pi*f1/p; %系数; x4=68/2*pi*f1*c; %折算到定子侧的容抗; for n=0:n0 s=(n0-n)/n0; z=(r1+r2/s)^2+(x1+x2-x4)^2; %折算到定子侧的总阻抗; t=m1*uN^2*r2/s/w/z; %电动机机械特性; plot(t,n,'-') hold on end end xlabel('电磁转矩[N,m]]');ylabel('转子转速[r/min]'); title('n=f(T)') grid on axis([0 650 0 1650]) gtext('f1');gtext('f2');gtext('f3');gtext('f4');gtext('f1 图5 电容转子三相异步电动机降低电源频率时的机械特性 特点:频率较低时起动最大转矩出现峰值,起动时过载能力强却会出现机械冲击,适合恒转矩类负载。 通过电容转子三相异步电动机转子串电阻、降低电源电压、降低电源频率三种情况的机械特性探究与仿真,可以得出结论:通过电容转子三相异步电动机的起动特性和调速特性总体上要明显优于传统的非电容转子三相异步电动机。 [1] 黄群.电容转子异步电动机[J]. 电气时代, 2006, (3): 84-87. [2] 朱春鸯, 周政新. 三相异步电动机调速机械特性仿真分析[J]. 上海第二工业大学学报, 2012, (4): 288-295. Mechanical Properties of Three-Phase Asynchronous Motor with Series Capacitor Correction Strategy Zhang Dexiao (Bohai Shipbuilding Vocational College, Xingcheng 125105, Liaoning, China) TP306 A 1003-4862(2017)12-0069-04 2017-09-15 张德孝(1964-),男,副教授。研究方向:电机工程。E-mail: hldzdx@163.com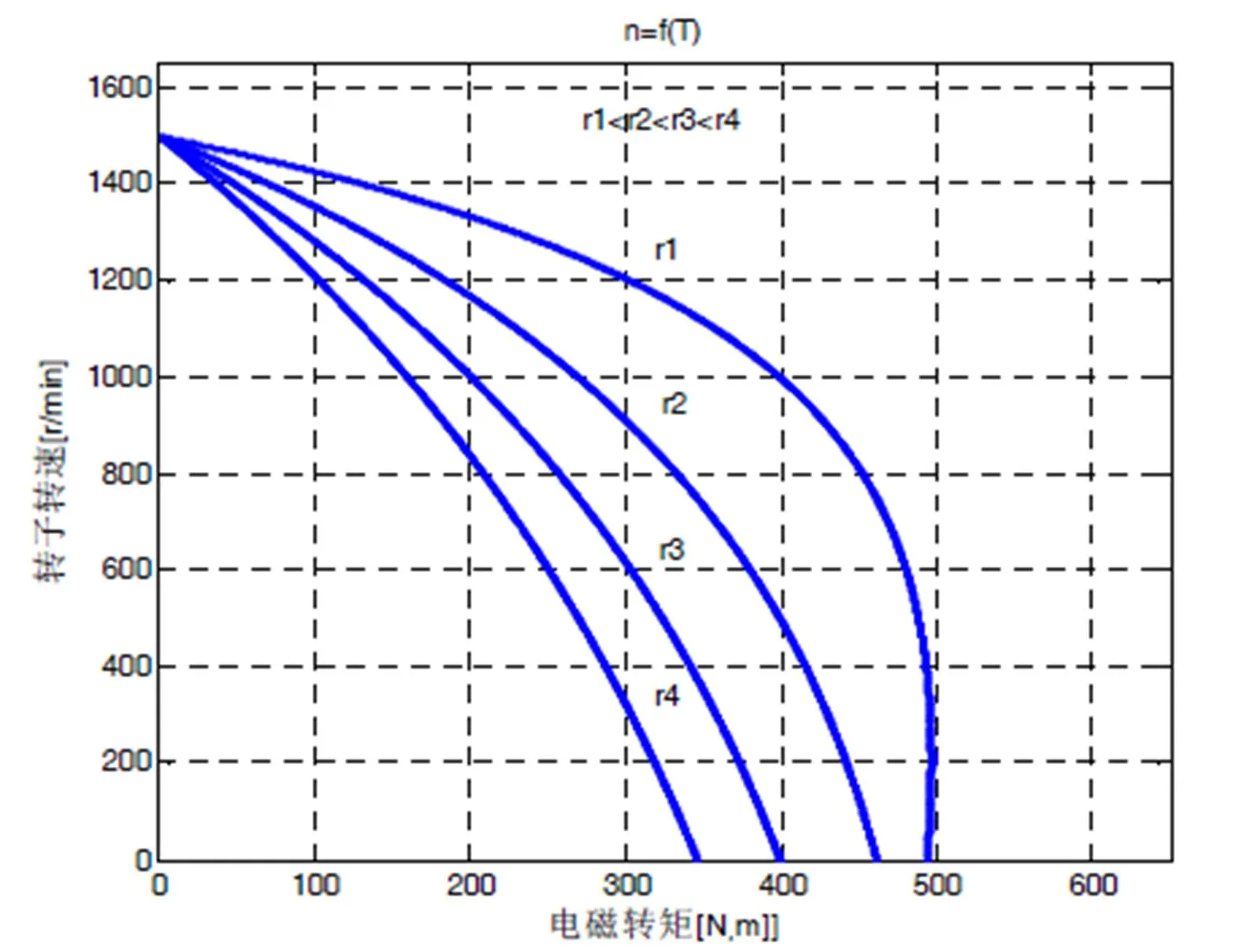
3 电容转子三相异步电动机电源电压降低时的机械特性
4 电容转子三相异步电动机降低电源频率时的机械特性

5 结论