定量管中液面透光特性的研究
2017-01-24赵金宝马永跃
赵金宝 马永跃
摘要:为了提高液位定量管中液面检测精度。设计了一套检测装置,精确测量液面经过光电检测器的过程中,光电信号的变化特征曲线。
Abstract: In order to improve the detection accuracy of the liquid level in the liquid level quantitative tube. A set of testing device is designed to measure the change characteristic curve of the photoelectric signal when the liquid level passes the photoelectric detector.
关键词: 液位定量管;水质分析仪;光电技术
Key words: liquid level quantitative tube;water quality analyzer;photoelectric technology
中图分类号:X851 文献标识码:A 文章编号:1006-4311(2017)01-0121-02
0 引言
定量系统是水质分析仪的关键技术之一。定量系统的定量精度直接影响分析仪的测量精度。目前定量系统采用的定量技术主要有定量环、定量泵、注射泵和液位定量管等。液位定量管主要优点是结构简单,成本低。因此液位定量管在水质分析仪中的应用比较广泛。但定量精度和对不同溶液的稳定性一直是困扰液位定量管应用的难题。
本文采用高精度抗干扰的红外对管测量电路,对定量管中凹液面不同位置对红外线透射率的影响,进行精确测量。从凹液面的特征曲线中找出凹液面底部的特征,从而对凹液面底部进行定位,实现定量管的精确定量。
1 系统总体设计
1.1 系统结构
本系统由光信号测量单元、液路控制单元和MPU控制单元组成。
其中的光路测量单元由一对红外对管、信号调制与测量电路组成。红外对管的安装位置如图1所示。本系统光学测量单元采用红外对管,可以排除外界可见光干扰。红外对管的驱动采用高频调制信号,可以提高测量系统的稳定性。
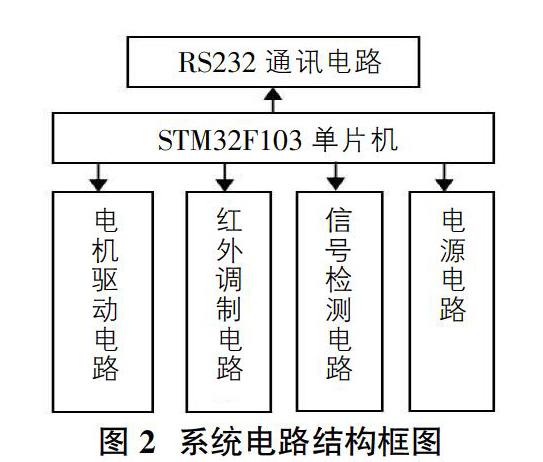
液路输送单元由液位定量管、蠕动泵、泵电机驱动以及水管组成。蠕动泵通过水管将不同液体输送到液位定量管。MPU控制单元,由STM32103RB微控器,RS232接口芯片和IO接口组成。控制单元通过RS232接口芯片与上位机通信,将测量数据实时上传到PC机。
系统电路结构图如图2所示。
1.2 控制测量方案设计
第一步将液体抽至红外对管上部约1厘米处。
第二步控制水泵,使液体以0.5mm/s的速度下降,同时以1ksps的速率采集数据,并将数据实时上传至PC机。
第三步液面低于红外对管约1厘米时,停止数据采集。
第四步重复前三步骤,采集下一组数据。
2 主要硬件电路设计
系统采用16位ADC,串口发送采用无校验,一位停止位模式,如果满足1ksps的采样率,则串口波特率至少需要20bits/s的波特率。STM32F103RB单片机内置有UART串口,最高波特率可达到4.5Mbits/s[6]。在实际使用中,串口波特率采用115200bits/s,完全满足设计需求。本文重点介绍其他关键硬件电路设计
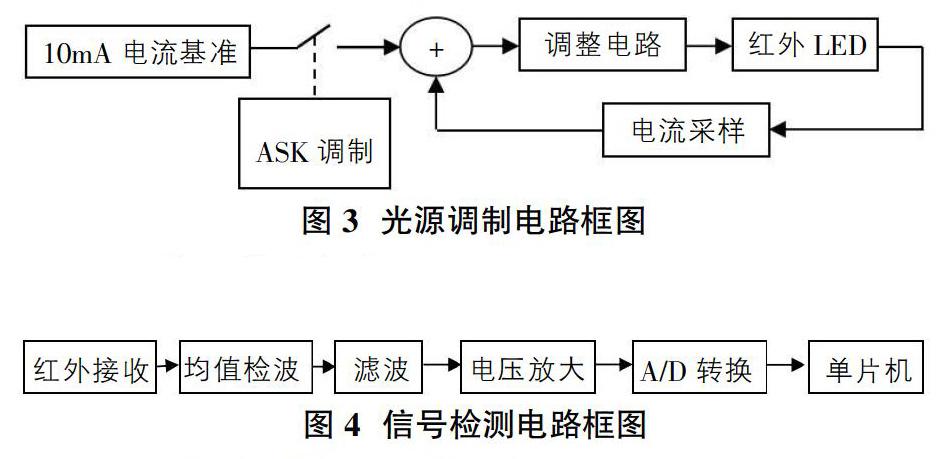
2.1 光源调制电路设计
本系统采用红外对管,可以减小外界可见光干扰。为了进一步减少外界背景红外光的干扰,本系统对红外二极管采用ASK调制,从而剔除背景红外光的信号。同时为了光源的稳定,本系统电路还对红外二极管的电流采用恒流控制。实现原理如图3所示。
2.2 信号检测电路
由于红外LED采用的ASK调制,信号检测需要通过均值滤波还原红外光信号强度。同时在电压放大之前应进行工频陷阱滤波以及低通巴特沃斯滤波,增加系统的抗干扰能力。然后根据AD转换芯片的特点放大电压信号,此装置选择的16位逐次逼近型AD芯片LTC1864,采用单5V工作电源,内部包括采样及保持电路,通过三线式串行I/O进行读取数据,电路设计简单,精度及稳定性能较好。最终由单片机进行数据处理。图4为信号检测原理框图。
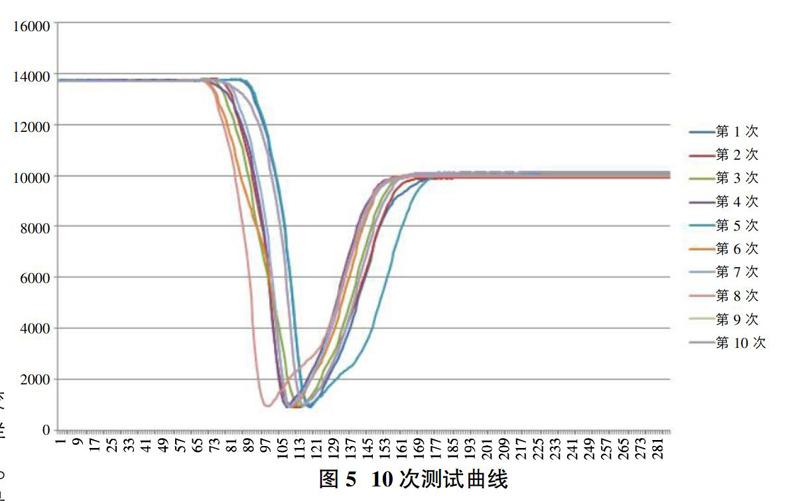
3 测试结果(如图5 所示)
4 结语
通过测试结果曲线可以看出,本测试系统的重复性和一致性非常好,通过判断数据变化率,可以精准判断凹液面的位置。
参考文献:
[1]蒋宗文,储青,孔力.光电液位检测技术研究[J].检测与控制装置,1996,23(2):41-44.
[2]田学隆,林芳钦.基于光电传感器的液位检测方法与装置[J].传感器与微系统,2009,28(10):73-74.
[3]马晓璐,黄世杰.基于PM的多功能超宽带调制技术的研究[J].红外与激光工程,2015,44(8):2423-2428.
[4]王功利,刘景.红外对管及其在测量滴流速度方面的应用[J].电子技术应用,1996(5):31-35.
[5]刘新红. 一种基于包络检测的ASK调制解调电路设计[J]. 现代电子技术,2014(6):35-38.
[6]STM32F101xx, STM32F102xx, STM32F103xx, STM32F105xx and STM32F107xx advanced ARM■-based 32-bit MCUs.
[7]Tanpowpong K, Chiratthiti C. Efficacy of the ramathibodi nasal filter in a simulated human airway evaluated by a laser diode portable dust monitor under low laser smoke particle concentration[J]. Journal of the Medical Association of Thailand= Chotmaihet thangphaet, 2002, 85(2): 195-199.
[8]Kamrani E, Lesage F, Sawan M. Low-noise, high-gain transimpedance amplifier integrated with SiAPD for low-intensity near-infrared light detection[J]. IEEE Sensors Journal, 2014, 14(1): 258-269.
[9]Van Hoi T, Long H D, Duong B G. "High gain low noise amplifier design used for RF front end application"[C]//The 2013 IEICE International Conference on Intergrated Circuits, Design, and Verification. 2013: 243-247.
[10]邓军,单江东,张娜,等.大功率半导体激光器驱动器的研究与设计[J].半导体光电,2003,24(5):319-320.
[11]符永宏,潘国平,盛占石,等.基于 CPLD 与单片机的激光脉冲控制卡设计[J].江苏大学学报(自然科学版),2012,33(5): 561-566.
[12]Ahmed M, El-Sayed N Z, Ibrahim H. Chaos and noise control by current modulation in semiconductor lasers subject to optical feedback[J]. The European Physical Journal D, 2012, 66(5): 1-10.
[13]HU Y, YE Y, WU Y, et al. Design of Constant Current Source of Semiconductor Laser Based on Single-chip Microcomputer[J]. Experiment Science & Technology, 2008, 1: 004.
[14]Zivojinovic P, Lescure M, Tap-Béteille H. Design and stability analysis of a CMOS feedback laser driver[J]. IEEE transactions on instrumentation and measurement, 2004, 53(1): 102-108.
[15]Waite M, Prata S, Martin D. C primer plus[M]. Sams, 1987.
[16]Prata S. C++ primer plus[M]. SAMS publishing, 2002.
[17]Jeon H K, Kim H R, Choi J M, et al. High speed serial interface for mobile LCD driver IC[C]//2008 IEEE International Symposium on Circuits and Systems. IEEE, 2008: 157-160.