三相PWM整流器基于旋转坐标系的电流控制方法
2017-01-20魏克新
张 瑞,刘 浩,魏克新
(天津理工大学天津市复杂系统控制理论及应用重点实验室,天津300384)
三相PWM整流器基于旋转坐标系的电流控制方法
张 瑞,刘 浩,魏克新
(天津理工大学天津市复杂系统控制理论及应用重点实验室,天津300384)
为了达到三相PWM整流器内环电流协调控制,可以通过空间矢量模型选择合理的电感电压矢量(IVV),使电流变化率朝着正确的方向变化,消除电流误差。为了精确选择合理的IVV,并保证其简便性,提出了旋转坐标系的方法,即通过扇区旋转和矢量旋转,选择与电流误差矢量相邻的IVV,并确定其位置关系。此方法能够分别运用滞环电流控制(HCC)或空间矢量调制(SVM)两种形式得以实现,进而达到不定频或定频控制。最后通过实验对比研究,说明该理论的有效性和两种方法的差异性。
三相PWM整流器;协调控制;电感电压矢量(IVV);旋转坐标系;扇区旋转;矢量旋转;电流误差矢量
近年来,三相PWM整流器被应用于包括并网发电、电气传动、直流输电、有源滤波等各种场合,其控制方法的研究愈来愈受学术界关注[1-10]。在诸多整流器控制方法中,双环控制[3]极为成熟,即外环控制用来稳定直流电压,内环控制用来跟踪网侧指令电流。为了实现网侧电流正弦化,运行于单位功率因数,能量可双向传输,很小的谐波畸变以及快速的电流响应,内环控制策略直接影响着网侧以及直流侧性能,所以至关重要,并研究出了大量的内环控制策略[4-6]。滞环控制(HCC)由于采用各相独立控制故不能协调地控制电流;基于空间矢量调制(SVM)的控制方法其电流环大多需要PI调节、解耦控制[4]及变换,故增加了系统复杂性。文献[7]提出了滞环和空间矢量相结合的方法,可以有效解决这些问题。其实现方法需要查表或逻辑运算,易于硬件实现,但经常因为不能选择最优开关状态而存在控制误差。
为了满足以上要求,消除电流误差矢量[8],本文提出了一种新的方法,通过旋转坐标系选择合理的电感电压矢量,使电流变化率朝着正确的方向变化。即首先通过扇区旋转的方法寻找相邻矢量,再通过矢量旋转的方法判定其位置关系,不但可以准确找到最优开关状态,而且算法简便,易于处理器实现,不依赖于系统参数,鲁棒性强。并在此基础上分别运用了滞环和空间矢量调制法来实现,为了限制开关频率,前者需要设定采样频率,后者运用三角波调制。本文分别对这两种实现方法做了详细描述。

图1 三相电压型整流器拓扑图
1 三相PWM整流器控制原理
三相电压型可逆整流器其简易拓扑如图1所示。s=0表示下桥臂导通,上桥臂关断;s=1表示下桥臂关断,上桥臂导通。分别代表各相交流侧输出电压,可以表示如下[9]:





表1 矢量Vk与开关函数的关系
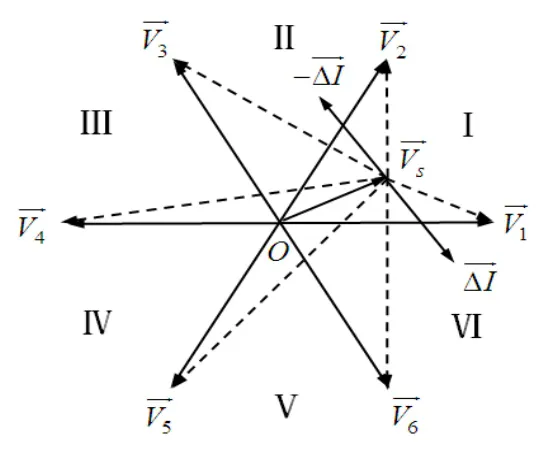
图2 各矢量分布图
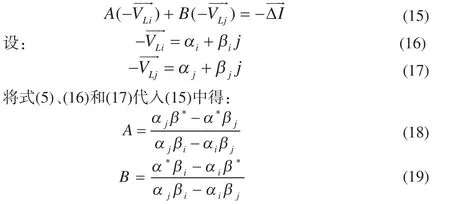
1.1 两矢量位置关系的判定方法(矢量旋转)


旋转后的矢量分别为:


图3 矢量旋转后的图形
因为矢量旋转是为了代替角度计算,当矢量旋转时,各矢量会等比例变化。因为:

因此,通过式(9)、(10)可得:

公式(3)~(2)变换如下:

为了省略公式(3)~(2)变换,将式(12)代入式(11)中,可得:

1.2 相邻矢量的判定方法(扇区旋转)
如果所有开关矢量都按照式(13)进行矢量旋转,计算量较大。可以找到相邻的两个矢量,即,再确定两矢量与的位置关系。本文提出一种扇区旋转的思想,具体方法如下:
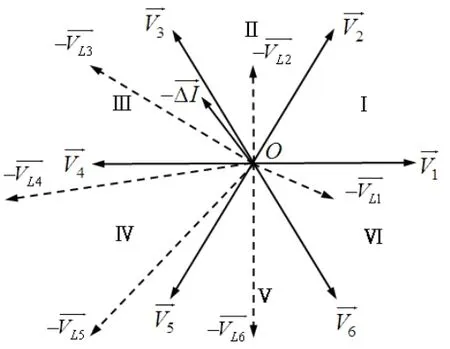
图4 图2变换后的图形

图5 扇区旋转前后的图形

表2 在Ⅰ区时和的判断规则

表2 在Ⅰ区时和的判断规则
-ΔI ¯¯→所在扇区 判断方法 相邻矢量 和-¯¯→VLi -¯¯→V -¯¯→-¯¯¯→LjⅠ 无 和V -¯¯→L1V -¯¯¯→L2 V VⅡwα2<0 和-¯¯→-¯¯¯→L1L2 wα2>0 和VVL3 L2 V -¯¯¯→-¯¯→VⅢwα3<0 和-¯¯¯→-¯¯¯→L2L3 wα3>0 和VV -¯¯¯→-¯¯¯→L3L4 wα4<0 和-¯¯→VL3L4VⅣwα4>0并wα5<0 和-¯¯¯→VV L4 -¯¯¯→-¯¯¯→L5 wα5>0 和-¯¯¯→VL5V -¯¯→L6 wα6<0 和VVⅤ-¯¯→-¯¯¯→L5L6 wα6>0 和VV L6L1 wα1<0 和-¯¯¯→-¯¯→VVⅥL6 -¯¯¯→-¯¯→L1 wα1>0 和VL1VL2
2 实现方法



进而可以通过常用的空间矢量调制技术得以实现[10]。例如按照图2所示的情况,应选择和两种开关状态进行合成,按照本文所述方法,其调制结果如图6所示。两种方法流程图分别为图7(a)、(b)所示。

图6 图2所示的开关时序图

图7 两种方法的流程图
3 实验研究
为了对比验证两种方法及其有效性,搭建了一台变流器样机并进行小功率500 W开环实验,选取参数如下:交流侧相电压有效值=20 V,直流侧负载=20 Ω,电感=3 mH。控制芯片DSP选择TI公司的TMS320F2812,IGBT作为电力电子器件,分别用两种方法,限制开关频率在5 kHz以内进行实验。由于方法一频率不固定的特点,故用采样频率进行限制,即每采样一次执行一次中断,并运行程序发出一次控制信号。为了限制开关频率在5 kHz以内,设定采样频率为10 kHz。方法二只需设定载波频率为5 kHz,即可达到定频控制的目的。
两种方法交流侧波形如图8所示,(a)为方法一,(b)为方法二。可以看出,方法二由于属于定频控制,而且每个周期内都含有零矢量,电压干扰和电流谐波更小,THD分别为4.8%和2.7%。两种方法从不控到可控过程中,交流电流与直流电压变化波形如图9所示,(a)为方法一,(b)为方法二。方法二由于增加零矢量,起始阶段不能很好跟踪指令电流而产生较大超调,故其电流跟踪的快速性不如方法一。

图8 两种方法的波形

图9 两种方法的波形
4 结论
对于传统空间矢量模型,本文提出了旋转坐标系的方法消除误差电流,它具有以下优点:(1)可以达到精确、协调控制三相电流。(2)算法简便,能达到快速电流响应。(3)对电感等系统参数无依赖,不但可以用于可逆变流器、无功补偿器,还可用于有源滤波器等装置中。
在此基础上,本文提出了两种实现方法,分别是基于滞环和基于矢量合成的方法。方法一由于开关频率不固定的特点,需要用采样频率进行限制,故采样次数一般比较低。其最小开关周期等于两倍的采样周期,开关周期占空比不可控,为0、0.5或1。快速性较好但谐波较大,适当地设定滞环宽度可以提高其性能。方法二属于定频控制,对采样频率无要求,控制信号通过事件管理器产生,不但占空比会根据误差电流随时变化,而且充分利用了DSP的强大功能。本文采用1/2比例的零矢量,可以达到很好的交流侧性能。对于不同的电路参数,需要适当选择零矢量所占比例,以达到最优效果。
[1]VIDAL E F,COLLING I E,BARBI I.A bidirectional PWM threephase step-down rectifier based on the differential-mode power conversion principle[J].IEEE Trans Power Electronics,2009,24 (12):2951-2958.
[2]BOUAFIA A,GAUBERT J P,KRIM F.Predictive direct power control of three-phase Pulsewidth Modulation(PWM)rectifier using Space-Vector Modulation(SVM)[J].IEEE Trans Power Electronics, 2010,25(1):228-236.
[3]汪万伟,尹华杰,管霖.双闭环矢量控制的电压型PWM整流器参数整定[J].电工技术学报,2010,25(2):67-72.
[4]钟炎平.一种新的PWM整流器电流解耦控制策略[J].电工技术学报,2005,20(8):74-77.
[5]MOHAMED Y A R I,EL-SAADANY E F.Robust high bandwidth discrete-time predictive current control with predictive internal model-A unified approach for voltage-source PWM converters[J].IEEE Trans Power Electronics,2008,23(1):126-136.
[6]帅定新,谢运祥,王晓刚.三相PWM整流器混合非线性控制研究[J].中国电机工程学报,2009,29(12):30-35.
[7]张兴,张崇巍.PWM可逆变流器空间电压矢量控制技术的研究[J].中国电机工程学报,2001,21(10):102-109.
[8]杨德刚,刘润生,赵良炳.三相高功率因数整流器的电流控制[J].电工技术学报,2000,15(2):83-87.
[9]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003:227-229.
[10]杨贵杰,孙力,崔乃政,等.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001,21(5):79-83.
Novel method of current control based on rotating coordinate of three phase PWM rectifier

In order to achieve the coordinated control of the inner current loop of three-phase PWM rectifier,suitable inductance voltage vector(IVV)based on the space vector model should be selected,the variation of the current vector should point to the right direction to eliminate the current error.For selecting the right IVV accurately and simply,a method of rotating coordinate,namely through sector rotation and vector rotation,was presented to select the adjacent IVV of the current error vector.Then their position was determined.Hysteresis current control(HCC)or space vector modulation(SVM)two ways were used by this method to execute,and variable frequency or fixed frequency control could be achieved.Finally,the comparative experimental study illustrate the validity of this theory and the difference of the two methods.
three-phase PWM rectifier;coordinated control;inductance voltage vector(IVV);rotating coordinate; sector rotation;vector rotation;current error vector
TM 461
A
1002-087 X(2016)03-0649-03
2015-08-26
国家自然科学基金(50977063)
张瑞(1988—),女,山西省人,硕士生,主要研究方向为电力电子技术及功率变流器控制策略。
