动态噪声差分算法实现拉曼测温仪高精度检测
2017-01-19李云亭张明江张建忠
李云亭,张明江,刘 毅,张建忠
1)太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;2)太原理工大学物理与光电工程学院,光电工程研究所,山西太原 030024
【光电工程 / Optoelectronic Engineering】

动态噪声差分算法实现拉曼测温仪高精度检测
李云亭1,2,张明江1,2,刘 毅1,2,张建忠1,2
1)太原理工大学新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;2)太原理工大学物理与光电工程学院,光电工程研究所,山西太原 030024
传统分布式光纤传感系统采用固定噪声基底计算散射光强度.但在分布式拉曼测温系统中,由于雪崩光电二极管(avalanche photo diode,APD)光接收机工作时的温度和偏压等因素会导致基底微小改变;而由于拉曼散射光远弱于瑞利散射光,在长距离的温度解调时这个微小的改变对解调结果的影响尤为明显.为解决此问题,提出动态噪声差分算法的方法,即将菲涅尔反射峰后的基底噪声的平均值作为此散射光的动态噪声基底,实现对APD光接收机的噪声基底的动态测量.在拉曼自解调实验系统中,发现由于接收机工作时的温度和偏压等因素的微小改变导致光接收机的噪声基底存在6.62 mV的波动,且噪声基底波动导致测温精度随距离的上升而恶化;采用动态噪声基底的方法可消除噪声基底波动对测温结果的影响,将有效传感距离从3.0 km延长至11.5 km,同时在10.4 km处实现了0.61 ℃的测温不确定度和1.58 ℃的测温精确度,可为分布式拉曼传感长距离测量提供参考.
非线性光学;拉曼散射;分布式光纤温度传感;光接收机;动态噪声差分算法;拉曼自解调
温度作为一个重要的物理参量,在工程及实验中需要对其进行有效的监控[1-2].为获得空间温度的分布,电学的点式传感系统[3]和基于光栅的准分布式传感系统[4]被用于测量温度的分布,但均无法实现对空间任意点温度的测量,且光纤光栅波长解调复杂,工程应用成本高[5].光纤分布式传感系统成本低,可测量光纤沿线上任意点的温度,且具有抗电磁干扰、安全性好和可靠性高等优点[6],可在危险环境中工作.同时结合光时域反射技术(optical time-domain reflectometer,OTDR)和受温度影响的拉曼散射光强度,可同时获得光纤任意点的温度信息和位置信息.因此,自Dakin等[7]首次实现分布式光纤拉曼测温以来,基于拉曼散射的分布式光纤传感系统得到了研究者的极大关注[8-12],已被广泛用于煤矿地下气化系统[13]、电力电缆[14]、油库罐体和传输管线[15]等的实时温度监测中.
光纤拉曼散射光强度远弱于瑞利散射光强度,因此在分布式拉曼测温系统中,信号的提取及处理尤为重要.雪崩光电二极管(avalanche photo diode,APD)具有量子效率高、感光灵敏度强、频谱范围宽及本身对信号具有放大作用等优点[16],极适于光纤中拉曼散射光的接收和探测[17-18].在传统的传感系统中,为获得散射强度信号,总是减去光接收机的一个固定基底,而实际上基于APD光接收机的基底时刻发生微小的改变,且拉曼散射光远弱于瑞利光,这导致分布式光纤拉曼测温系统无法实现远距离测量.
本研究在文献[19]对APD特性研究的基础上,通过实验分析了基于APD的光接收机噪声基底的波动对分布式光纤拉曼自解调测温系统传感距离和测温精度的影响,提出动态噪声差分算法,即通过计算菲涅尔反射峰后的基底噪声的平均值作为此散射光的动态噪声基底的方法,并将该算法用于分布式光纤拉曼自解调测温系统中,提高了系统的传感距离和测温精度.理论上,采用该算法可降低分布式光纤拉曼测温系统对光接收机温度控制和偏压控制精度的要求,为分布式拉曼测温系统长距离测量提供了参考.
1 自解调实验装置及原理
图1为分布式光纤拉曼自解调实验装置.实验中将中心波长为1 550 nm的脉冲光注入到波分复用器(wavelength division multiplexing, WDM)中,并依次注入处于恒温槽(Ther)控制的定标光纤和传感光纤中,光纤总长为11.5 km,其中将位于2.3 km处的test 1、7.3 km处的test 2及10.4 km处的test 3的3个传感光纤置于恒温水槽(TCC)中,散射回来的光经WDM注入APD中进行光电转换,再由放大器(amplifier)放大后,由与激光(laser)输出同步信号触发的数据采集卡(data acquisition card, DAC)接收.接收的光强I(t)和解调原理可由式(1)和式(2)表达.
(1)
(2)

图1 分布式光纤拉曼自解调实验装置Fig.1 The experiment of distributed optical fiber sensor based on self-demodulation

2 APD光接收机基底噪声
在基于拉曼散射的分布式光纤传感系统中,后向拉曼散射信号弱于瑞利散射信号约为40 dB,故光探测器的基底噪声往往对测温系统的测温结果起决定性影响.在分布式拉曼测温系统中,后向拉曼散射光-电转换后的信号和光-电转换后基底噪声的值如图2.

图2 拉曼后向散射和光接收机噪声基底Fig.2 Raman backscattering and basic noise of optical receiver
图2(a)为某次测量时拉曼反斯托克斯后向散射图,其中将光纤尾端菲涅尔反射峰后的噪声强度的平均值作为该次测量后向散射光的动态噪声基底;图2(b)为光接收机的基底噪声,红点为在无光输入且无散射光时的固定噪声基底,蓝点为存在散射光时根据图2(a)的噪声基底平均值所求的动态噪声基底.由图2(b)可知,实际测量时APD光接收机的噪声基底是不稳定的:在无光注入的情况下,开始测量时接收机的固定噪声基底为-66 mV;当向光纤中注入光后,与开始测量时的噪声基底相比,此时的噪声基底迅速升高,接下来保持在-48.79~-42.17 mV波动;停止测量(即停止输入光)后,基底噪声依旧保持在有光输入的波动范围内,为-42.45 mV.该现象产生原因为,APD光接收机基底噪声主要由APD的暗电流噪声和光检测器的均方热噪声组成,噪声电流均方值为
(3)
由式(3)可知,接收机的基底噪声会随着APD的放大倍数和接收机的工作温度的改变而变化,而APD的放大倍数主要与其控制偏压和运行温度有关,并随着运行温度和控制偏压的增大而增大.
图2(b)中,在接收机刚开始工作时,系统的偏压和温度并未达到稳定状态,故其噪声基底相对较大;当系统达到稳定状态并开始测量时,由于接收机的温度和偏压无法保持恒定,从而导致接收机的热噪声和体暗电流噪声存在一定范围的波动.
3 接收机基底波动对测温结果的影响
接收机的噪声基底对温度解调结果的影响如图3.其中,图3(a)是TCC在测量时温度为35.17 ℃,定标时温度为22 ℃时,某次后向散射解调结果对比图.其中,红色曲线是测量和定标都采用图2(b)中的开始测量时的-66.42 mV固定噪声基底的解调结果;蓝色曲线是噪声基底采用结束测量时的-42.45 mV解调结果;橙色曲线是采用59次测量的平均值-45.53 mV作为固定噪声基底的测量结果;黑色曲线是定标(-44.84 mV)和测量(-48.50 mV)同时采用动态噪声基底的解调结果.图3(b)为图3(a)在test 3处,不同基底情况下的细节图.
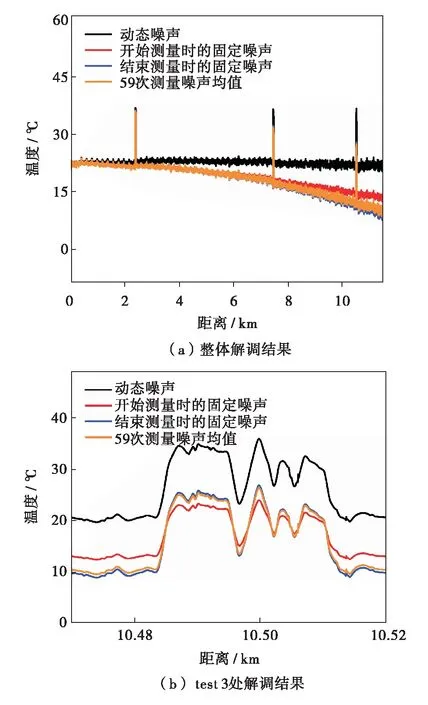
图3 基底波动对解调结果的影响Fig.3 The result influenced by basic noise fluctuation
由图3(a)可知,采用动态噪声基底可有效增加系统的传感距离,提高系统的测温精度.当测量和定标同时采用固定噪声基底时,系统在传感距离约为3 km时开始测温不准确,且随着距离的增大其测温精度降低,到了光纤末端系统的测温误差可达13.0 ℃.若在定标和测量都采用本研究定义的动态噪声基底作为此散射光的噪声基底时,系统的测温波动趋势消去,虽然在末端也存在0.7 ℃的测温误差,但这完全可认为是由于实际测量时有噪声而导致的结果.
图3(a)中固定基底时,温度解调结果全部呈向下趋势,且随着固定噪声基底的减小,逐步接近实际测温曲线.这是由于在减去固定基底时,定标时用于计算的散射强度和实际散射强度的差大于测量时用于计算的散射强度其实际散射强度的差,即相对而言定标散射强度偏高于实际值.由式(2)可知,此时造成测量值低于实际值,且随着光纤长度的增加,后向散射光逐渐减弱,导致该差值对温度解调结果影响变大,即随着距离的增加系统的解调精度降低;而随着噪声基底减小并逐渐接近测温曲线是因为,基底越小所求出的散射光强越大,导致在末端比值变化的作用也越小,即温度和实际温度愈接近.
从图3(b)中test 3处测温细节可见,使用动态噪声差分算法时,系统的测温结果为34.17 ℃;而使用其他固定基底时,测量值最小为22.28 ℃,最大为24.66 ℃,与实际值相差超过10 ℃;且测温温度随着基底的变小呈下降趋势.这是因为在本实验系统中,22 ℃的室温变为35.17 ℃时,散射强度变化量在test 3处仅约20 mV,根据式(2),只考虑测量时基底的变化,减去固定噪声基底和实际噪声基底之间的差越大,则测温结果和实际值相差越大;若与定标时一起考虑,测温结果会在图3(a)趋势中偏离实际值,即造成随固定基底的变小测量温度也越偏离实际温度.这意味着即使减去固定基底能得到与实际基底温度相同的温度,也无法在实际测温点获取正确的温度.
所以,使用动态噪声基底的方法,即实时获取每组测量数据准确的噪声基底,克服接收机温度偏压波动导致的基底不确定,可有效提高系统的测量距离,同时保证测温精度.
4 测量结果及分析
为进一步验证动态噪声差分算法可有效提高系统的传感距离和测温精度,本研究搭建了分布式拉曼自解调测温系统,并在室内恒温环境下进行光纤多区段的温度测量实验.实验中,将3个测试区段(test 1、test 2和test 3)置于同一个恒温槽中,恒温槽温度在35~65 ℃调节,每隔5 ℃取一个测量温度点,并用动态噪声基底的方式解调温度.测温结果总体分布如图4.
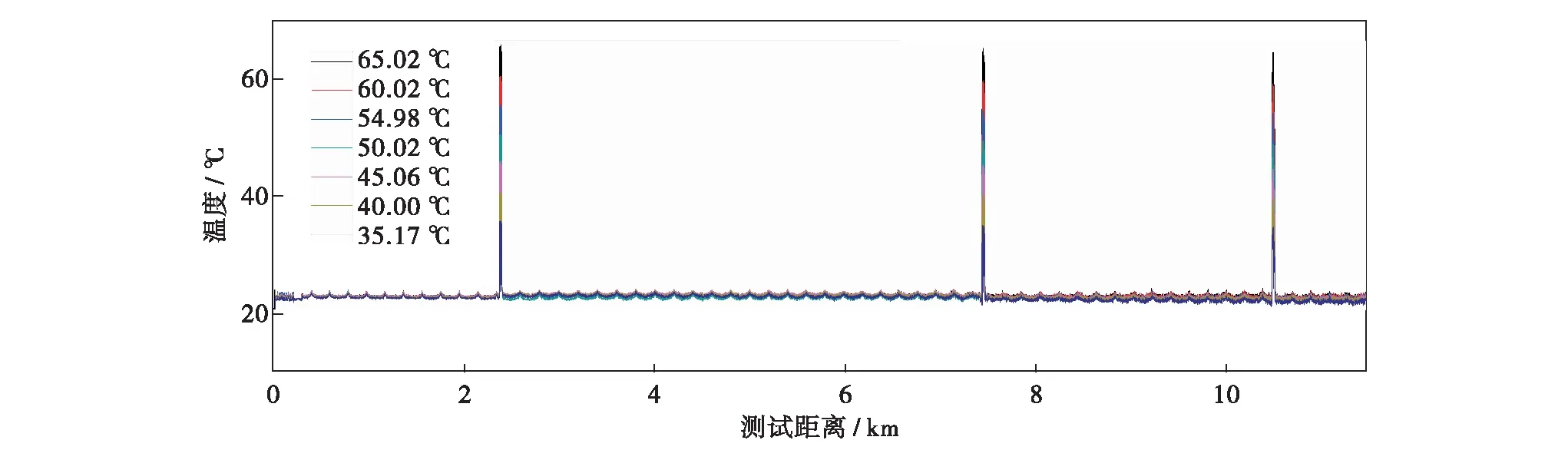
图4 测温结果整体分布Fig.4 The overall-distribution of the temperature measurement results along the fiber
从图4可见,测温基底在光纤尾端基本保持和光纤前端一致,无明显温度变化趋势.在3个测试区段,测温结果与实际所设温度基本一致,表明采用动态噪声差分算法可提高系统的传感距离并保证系统的测温精度.
表1为3个测试区段在不同参考温度下的测量值和置信概率P=0.68时的测温不确定度.其中,参考温度是由Aglient E2308A热敏电阻温度探头测得,其测温误差为±0.2 ℃.从表1可见,系统测量值相对参考值的精确度在0.52~-1.58 ℃波动,且系统的测量值随传感距离的增加而降低,系统测温不确定度也将逐渐变大,即系统测温精度逐渐变差.这是因为随着传感距离的上升,光强因衰减逐渐减弱,导致系统的信噪比下降,进而使系统测温结果的波动增大;在解调过程中,为了消除部分噪声进一步提高信噪比,可采用小波变换的方法滤除噪声,但小波变换在消除噪声的同时也会滤去部分有用信号.光纤前端信号较强,微小信号的丢失对温度解调结果影响较小,而光纤后端信号较弱,导致微小信号的丢失对光纤后端测温结果的影响要大于光纤前端,因此,随着距离上升系统测温精度下降,测温结果逐渐降低.
值得注意的是,11.5 km的传感长度并非本系统可以达到的最大传感长度.由图2(a)的散射强度曲线可知,11.5 km处信号强度和基底噪声的信噪比远高于3 dB,以11.5 m处的曲线的切线和x轴交点可以得到约18 km的传感距离,这就意味着,该传感系统的传感距离有望达到18 km.虽然增加入射光可以提升系统的传感距离,而实际上,由于光纤中拉曼散射光的受激效应,自发拉曼散射允许的最大入射光强随传感距离的上升而减小[20],即当入射光强一定时,允许的最大传感距离也是一定的.再有,对于一个测温系统来说,空间分辨率也是一个重要的参考因素,而基于多模光纤的拉曼测温系统往往因为色散因素无法在长距离位置获得高的空间分辨率,所以为了获得较好的空间分辨率,目前基于多模光纤的拉曼测温系统的传感距离并未达到拉曼受激效应所允许的最大传感距离.本研究在多模光纤长度受限的前提下,综合考虑由于多模光纤色散导致空间分辨率随距离升高而恶化的因素,系统的传感光纤长度为11.5 km,而非该入射功率下自发拉曼散射允许的最大传感距离.

表1 不同测温位置的测温结果(P=0.68)
结 语
本研究基于APD的光接收机噪声基底波动探讨了分布式拉曼测温系统对测温精度和传感距离的影响,提出了采用动态噪声差分算法,可有效消除接收机温度和APD工作电压波动对分布式拉曼测温结果的影响.结果显示,该方法可将分布式光纤拉曼测温系统的传感距离从3.0 km延长至11.5 km,同时在光纤尾端实现了0.61 ℃的测温不确定度和1.58 ℃的测温精确度.研究结果可为分布式光纤拉曼测温系统远距离传感提供参考.
/ References:
[1] 郑晴蝶.基于51单片机的PT100铂热电阻在配网温度监控中的应用[J].中国高新技术企业,2016(31): 37-38. Zheng Qingdie. Platinum thermal resistance based on 51 single chip microcomputer applied in temperature monitoring of distribution network[J]. China High Tech Enterprises, 2016(31): 37-38.(in chinese)
[2] 周 奎,孟凡钦,朱美春.双面受火钢骨-方钢管混凝土柱的温度场分析[J].深圳大学学报理工版, 2014,31(4):402-409. Zhou Kui, Meng Fanqin, Zhu Meichun. Analysis of temperature distribution in square steel tube filled with steel reinforced concrete under two-side fire[J]. Journal of Shenzhen University Science and Engineering, 2014, 31(4): 402-409. (in Chinese)
[3] 蒋萧泽,王艳新,朱 莉,等.基于单片机的多点无线温度监控系统[J].电子测试,2016(13):25. Jiang Xiaoze, Wang Yanxin, Zhu Li, et al. Multi-point wireless temperature monitoring system based on single chip microcomputer[J]. Electronic Test, 2016(13):25.(in Chinese)
[4] 马晓川,周振安,刘爱春,等.高灵敏度稳定光纤光栅温度传感器的研究[J].光电子·激光,2013,24(7):1245-1250. Ma Xiaochuan, Zhou zhen’an, Liu Aichun, et al. A high-sensitivity and stable fiber bragg gating temperature sensor[J]. Journal of Optoelectronics·Laser, 2013, 24(7): 1245-1250.(in Chinese)
[5] 李学金,宋奎岩,洪学明,等.双空芯光子晶体光纤温度传感特性研究[J].深圳大学学报理工版,2010, 27(1):28-32. Li Xuejin, Song Kuiyan, Hong Xueming, et al. Research on temperature characteristics of hollow dual-core liquid-filled photonic crystal fiber[J]. Journal of Shenzhen University Science and Engineering, 2010, 27(1): 28-32.(in Chinese)
[6] 杜志泉,倪 锋,肖发新.光纤传感技术的发展与应用[J].光电技术应用,2014,29(6):7-12. Du Zhiquan, Ni Feng, Xiao Faxin. Development and application of optical fiber sensing technology[J]. Electro-Optic Technology Application, 2014, 29(6): 7-12.(in Chinese)
[7] Dakin J P, Pratt D J, Bibby G W, et al. Distributed optical fibre Raman temperature sensor using a semiconductor light source and detector[J]. Electronics letters, 1985, 21(13): 569-570.
[8] Soto M A, Nannipieri T, Signorini A, et al. Raman-based distributed temperature sensor with 1 m spatial resolution over 26 km SMF using low-repetition-rate cyclic pulse coding[J]. Optics Letters, 2011, 36(13): 2557-2559.
[9] Saxena M K, Raju S, Arya R, et al. Optical fiber distributed temperature sensor using short term Fourier transform based simplified signal processing of Raman signals[J]. Measurement, 2014, 47(1): 345-355.
[10] Dyer S D, Tanner M G, Baek B, et al. Analysis of a distributed fiber-optic temperature sensor using single-photon detectors[J]. Optics Express, 2012, 20(4): 3456-3466.
[11] Hwang D, Yoon D J, Kwon I B, et al. Novel auto-correction method in a fiber-optic distributed-temperature sensor using reflected anti-stokes Raman scattering[J]. Optics Express, 2010, 18(10): 9747-9754.
[12] Pandian C, Kasinathan M, Sosamma S, et al. Single-fiber grid for improved spatial resolution in distributed fiber optic sensor[J]. Optics Letters, 2010, 35(10): 1677-1679.
[13] Wang Jianfeng, Hu Chuanlong, Zhang Zaixuan, et al. Distributed optical fiber temperature sensor applied in underground coal gasification system[C]// Asia Communications and Photonics Conference and Exhibition.[S. l.]: Optical Society of America, 2010: 79900.
[14] Liu Yuan, Lei Tao, Sun Zhihui, et al. Application of distributed optical fiber temperature system in online monitoring and fault diagnosis of smart grid[C]// Asia-Pacific Power and Energy Engineering Conference.[S. l.]: IEEE, 2012: 1-4.
[15] Fernandez A F, Rodeghiero P, Brichard B, et al. Radiation-tolerant Raman distributed temperature monitoring system for large nuclear infrastructures[J]. IEEE Transactions on Nuclear Science, 2005, 52(6): 2689-2694.
[16] 梅海阔,刘建国,刘大畅,等.高灵敏度APD光接收机系统的设计与实现[J].光通信技术,2016,40(8): 15-18. Mei Haikuo, Liu Jianguo, Liu Dachang, et al. Design and realization of a high sensitivity APD optical receiver system[J]. Optical Communication Technology, 2016, 40(8): 15-18.(in Chinese)
[17] Sang Lei, Zhang Jie, Wang Xinqun. Research for thermal drift of APD gain in distributed temperature sensing system based on the Raman back-scattering[J]. Advanced Materials Research, 2012, 571: 716-720.
[18] 苏国彬,李 铮.分布式光纤喇曼测温系统光接收机的动态范围及测温数据的修正[J].光子学报,2002,31(4):475-479. Su Guobin, Li Zheng. The dynamic range evaluation of optical receiver in distributed fiber temperature sensor based on Raman back scatting and temperature correction[J]. Acta Photonica Sinica, 2002, 31(4): 475-479.(in Chinese)
[19] 许卫鹏,韩广源,杨世强,等.分布式拉曼测温系统中 APD 盖革模式控制[J].中国科技论文,2015(8):995-998. Xu Weipeng, Han Guangyuan, Yang Shiqiang, et al. The controlling of InGaAs avalanche photodiode with Geiger mode in Raman distributed temperature sensing system[J]. China Sciencepaper, 2015, 10(8): 995-998.(in Chinese)
[20] 徐海峰,张在宣,王剑锋,等.25 km光纤温度传感器中背向拉曼散射的放大效应[C]// 全国第12次光纤通信暨第13届集成光学学术会议论文集.广东四会:[s.n.],2005:841-845. Xu Haifeng, Zhang Zaixuan, Wang Jianfeng, et al. Raman amplification effect on backward Raman scattering in the 25 km fiber Raman sensor[C]// Proceedings of the 12th National Optical Fiber Communications and the 13th Conference on Integrated Optics. Guangdong Sihui:[s.n.], 2005: 841-845.(in Chinese)
【中文责编:英 子;英文责编:木 南】
High precision measurement for Raman distributed temperature sensor by dynamic noise difference algorithm
Li Yunting1, 2, Zhang Mingjiang1, 2†, Liu Yi1, 2, and Zhang Jianzhong1, 2
1) Key Laboratory of Advanced Transducers and Intelligent Control System of Ministry of Education, Taiyuan University of Technology, Taiyuan 030024, Shanxi Province, P.R.China 2) College of Physics and Optoelectronics, Institute of Optoelectronic Engineering, Taiyuan University of Technology, Taiyuan 030024, Shanxi Province, P.R.China
Fixed ground noise is always used to calculate the intensity of the backscattering in traditional distributed optical fiber sensing system. In the Raman distributed temperature sensor (RDTS), the ground noise will be influenced by the change of the working temperature and bias voltage of optical receiver based on avalanche photo diode (APD). Raman scattering light is the weakest one among three kinds of backscattering light. This means the tiny change of the ground noise will affect the results of temperature measurement, especially in long distance sensing system. In order to solve this problem, we propose a method of dynamic noise difference algorithm for RDTS. By using the average value of dark current noise which is behind Fresnel reflection as the dynamic ground noise, we dynamically obtain the actual ground noise of the optical receiver based on APD. In self-demodulation RDTS, the ground noise of optical receiver is about 6.62 mV. And as the distance increases, the temperature accuracy becomes worse and worse due to the ground noise fluctuation. When the influence of the ground noise fluctuation on the measure results is eliminated by dynamic noise difference algorithm, the effective sensing distance increases from 3 km to 11.5 km. And the uncertainty of 0.61 ℃ and the temperature accuracy of 1.58 ℃ are obtained over a 10.4 km sensing fiber. A RDTS with a long sensing distance is achieved by this method.
non-linear optics; Raman scattering; distributed optical fiber temperature sensor; optical receiver; dynamic noise difference algorithm; Raman self-demodulation
Received:2016-11-08;Accepted:2016-12-16
Foundation:National Natural Science Foundation of China (61377089); Key Science and Technology Research Project Based on Coal of Shanxi Province (MQ2014-09); Coal-Bed Methane Joint Research Fund of Shanxi Province (2015012005); Programs for Science and Technology Development of Shanxi Province (20140321003-1)
† Corresponding author:Professor Zhang Mingjiang. E-mail: zhangmingjiang@tyut.edu.cn
:Li Yungting, Zhang Mingjiang, Liu Yi, et al. High precision measurement for Raman distributed temperature sensor by dynamic noise difference algorithm[J]. Journal of Shenzhen University Science and Engineering, 2017, 34(1): 20-26.(in Chinese)
TN 29; TP 212.14
A
10.3724/SP.J.1249.2017.01020
国家自然科学基金资助项目(61377089);山西省煤基重点科技攻关资助项目(MQ2014-09);山西省煤层气联合研究基金资助项目(2015012005);山西省科技攻关资助项目(20140321003-1)
李云亭( 1992—) ,男,太原理工大学硕士研究生.研究方向:分布式光纤传感.E-mail: tyutlyt@163.com
引 文:李云亭,张明江,刘 毅,等.动态噪声差分算法实现拉曼测温仪高精度检测[J]. 深圳大学学报理工版,2017,34(1):20-26.
