基于DOB和二自由度控制器的某火炮稳定控制系统设计
2017-01-17王海稳曲俊海孙汉青庞继文
王海稳,曲俊海,孙汉青,庞继文
(1.太原科技大学自动化学院,太原030024;2.北方自动控制技术研究所,太原030006)
基于DOB和二自由度控制器的某火炮稳定控制系统设计
王海稳1,曲俊海2,孙汉青2,庞继文2
(1.太原科技大学自动化学院,太原030024;2.北方自动控制技术研究所,太原030006)
火炮稳定控制系统性能会受到如路况、火炮射击时产生的冲击力矩等外部扰动以及摩擦力矩变化、测量噪声、转动惯量变化等内部参数摄动的影响。针对此问题,引入一种DOB观测器和二自由度控制算法,来减少摩擦对系统性能的影响,提高系统对载体扰动的隔离能力。仿真和实验结果表明,所提出的算法可以有效提高系统的稳定精度和速度伺服性能。
炮控系统,二自由度,DOB,稳定精度
0 引言
火炮稳定控制系统(以下简称“炮控系统”)是火控系统的重要组成部分,作为火力控制主线末端的执行系统,发挥着控制火炮/炮塔指向和隔离载体扰动的作用,是实现火控系统主要战技指标的重要保证。性能优良的炮控系统可保证炮手在车辆高速行进时对火炮/炮塔指向的快速调整与精确瞄准。本文的重点就是设计先进的控制算法,使系统在受到如路况、火炮射击时产生的冲击力矩等外部扰动以及摩擦力矩变化、测量噪声、转动惯量变化等内部参数摄动的情况下,依然能够快速地调转火炮、精确地瞄准。
二自由度控制概念最早由Horowitz提出,近年来许多学者针对不同对象对其进行了许多研究,能够给伺服系统带来高响应速度和精度,提高系统的鲁棒性,在高性能伺服控制系统设计中得到了成功的应用。基于以上分析,本文将二自由度控制器应用于炮控系统中,提出一种新型炮控二自由度控制算法,可优化系统对操纵信号和载体扰动的响应性能。实验和仿真结果均验证了该算法的有效性。
1 炮控系统的组成和基本原理
炮控系统一般由操纵装置、控制箱、驱动器、执行电机、陀螺仪和传动装置等组成。如图1所示为速率稳定控制系统的原理框图,系统由速率稳定和电流双闭环控制系统构成。电流闭环系统用于克服电机本身的参数摄动和电气时间常数影响,保证电流(即电机力矩)对输入控制电压的响应特性。陀螺速率稳定闭环系统用于完成输出速度对输入指令的跟随和对载体扰动的克服。因此,陀螺稳定闭环系统可以看作是以指令为输入和以扰动为输入的两套速度伺服系统的叠加工作。
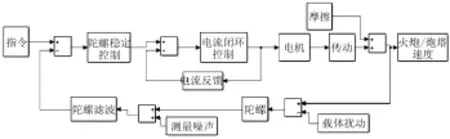
图1 炮控系统原理框图
输入指令一般是慢变的,对于系统响应来说可以用阶跃响应稳态误差和调节时间来衡量其性能;而载体扰动则较为复杂,与多种因素(如路况、车辆的行进速度、底盘悬挂系统的性能、陀螺的带宽以及各传动环节机械刚度等)有关。因此,本文主要研究对于载体扰动的二自由度控制策略。
2 DOB和二自由度控制系统设计
2.1 扰动观测补偿系统设计
在图1所示的炮控系统中,由于摩擦对系统精度有较大的影响,因此,在稳定系统设计中首先对摩擦进行扰动观测器设计,然后进行相应的补偿。
2.1.1 DOB观测器的原理
扰动观测器(DOB)最早由日本学者K.Ohnishi于1978提出,Umeno和hori提出了扰动观测理论。扰动观测器(DOB)结构简单,既能有效地解决干扰、模型不确定性及非线性摩擦问题,又能够补偿系统动态滞后,提高系统的跟踪精度。扰动观测的主要原理是将实际输出与名义模型输出之间的差异看作是作用于名义模型的等效扰动,估计出这种等效扰动后,将其加入到控制端以抵消外部扰动的影响。
2.1.2 扰动观测补偿
本系统中设计扰动观测器对系统中存在的摩擦、模型不确定等进行观测补偿,原理如图2所示,其中If是电流反馈系数,Cm是力矩系数,Mf是摩擦力矩,Gm(s)是机电模型,P(s)是传动环节以及被控对象模型,设计的扰动观测器中对前向通道的各环节进行了逆处理。其中通过对象标称模型的逆Pn-1(s)替代了实际对象模型的逆P-1(s),同时设计了一个低通滤波器Q(s),这样就保证了Q(s)Pn-1(s)物理可实现。
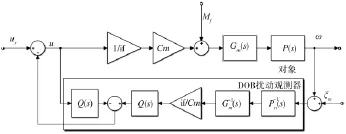
图2 炮控系统摩擦观测补偿系统原理图
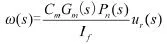
从系统输入输出特性分析扰动观测器,如图2所示,系统输出的表达式为:
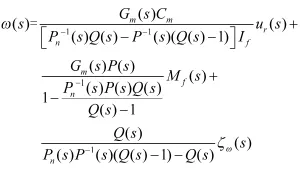
由一般的运动伺服控制系统的实际情况可知,系统的外部干扰和跟踪指令信号一般都集中在低频段,而测量噪声则在高频范围内。因此,可以通过滤波器Q(s)用来调整上式所示的传递函数。实现抑制对象低频干扰和高频测量噪声的目的。通常,假定外部干扰和测量噪声具有不同的频率范围,如果在低频段,Q(s)=1,在高频段,Q(s)=0。上式就可以近似如下:
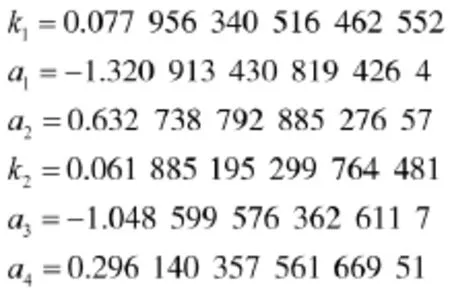
这说明在低频段,DOB使得系统的动态特性与标称模型相近似。高频段则系统接近于开环控制,没有测量噪声存在。因此,Q(s)的设计决定了DOB控制结构的鲁棒性和高频噪声抑制能力。本文中设计Q(s)为四阶巴特沃斯滤波器,选择低通滤波器截止频率为100 Hz,采样频率为1 MHz,根据MATLAB的FDATOOL工具箱设计四阶巴特沃斯滤波器如下:

其中:
2.2 二自由度控制器设计
2.2.1 重构载体扰动信号
本系统中,陀螺反馈信号实质上是载体扰动和火炮/炮塔相对承载机构运动作差的结果,即陀螺输出已经是误差信号,而要对载体扰动进行二自由度控制就必须重构一个可作用于系统的载体扰动信号。针对该问题,如图3所示设计在负载端安装测速机(也可以使用旋变或者码盘得到的位置信号进行微分得到速度信号),其信号与陀螺信号相减并进行滤波处理后得到载体扰动信号。在重构的过程中由于传感器的线性度、测量噪声以及采样时间差等影响会使得重构出的扰动信号存在噪声,因此,需要在作用于系统之前进行滤波处理。

图3 炮控系统二自由度控制原理图
2.2.2 二自由度控制器设计
将重构并滤波后的扰动信号加入到系统中,与陀螺反馈系统构成二自由度控制器,按照不变性原理设计F(s)。通过反馈通道克服参数摄动,外部扰动等影响,通过前馈通道保证载体扰动信号的速度响应,从而保证了系统稳定精度的有效提高。
3 系统建模仿真
图4为某炮控系统的仿真模型,图5是图4中obj部分的仿真模型,通过系统仿真可以观察到各控制部分对系统的作用,以及采取不同控制方法对最终控制性能的影响。
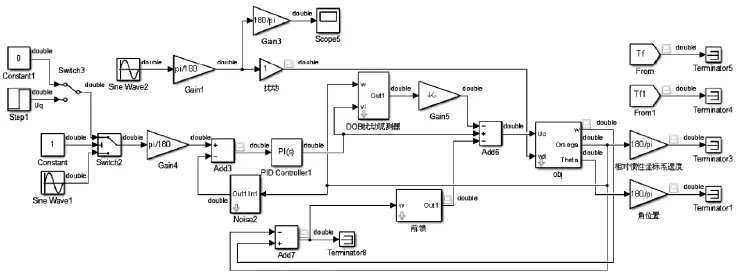
图4 某炮控系统的仿真模型
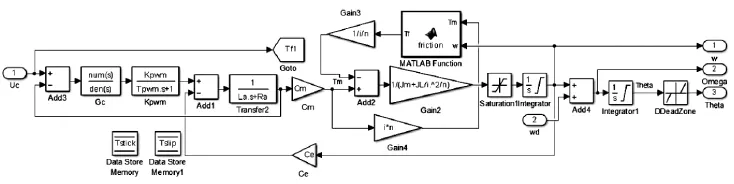
图5 obj部分的仿真模型
3.1 摩擦扰动和DOB观测器输出对比
下页图6所示为摩擦扰动和DOB观测器输出的特性曲线对比。从图中可以看出DOB观测器输出值与摩擦扰动波形基本一致,符号相反,幅值略小。
3.2 载体扰动信号重构滤波后的效果
图7为载体扰动原始信号和重构滤波后的信号对比,从图中可以看出重构滤波后的信号与原始信号波形基本一致,但包含一定的噪声。

图6 摩擦扰动和DOB观测器输出的特性曲线
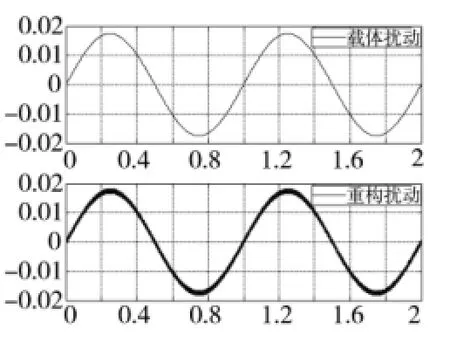
图7 摩擦扰动和DOB观测器输出的特性曲线
3.3 加入DOB和二自由度控制器后的输入响应和载体扰动响应
图8为加入DOB和二自由度控制器后阶跃输入响应对比。因二自由度控制器为针对载体扰动设计,对输入响应不影响。从图中可以看出相比原系统,新设计的控制器在快速性方面有所提高。
图9为加入DOB和二自由度控制器后载体扰动响应对比,从图中可以看出相比原系统,新设计的控制器稳定精度量值为原系统的42.8%,稳定精度大幅提高。
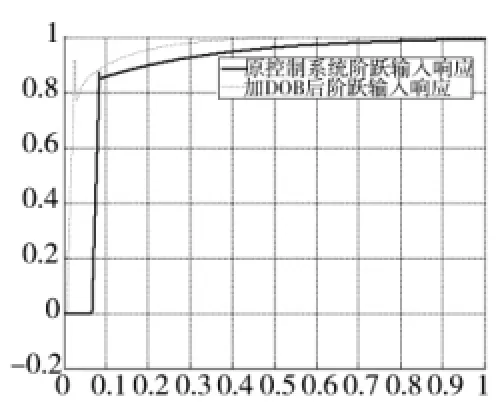
图8 加入DOB和二自由度控制器后阶跃输入响应对比

图9 加入DOB和二自由度控制器后载体扰动响应对比
3.4 实测的系统响应
图10为某实验系统采用前文设计的新型控制器后在摇摆试验中实测的系统响应数据,从图中可以看出相较于传统的控制器,新设计的控制器稳定精度有大幅度提高。
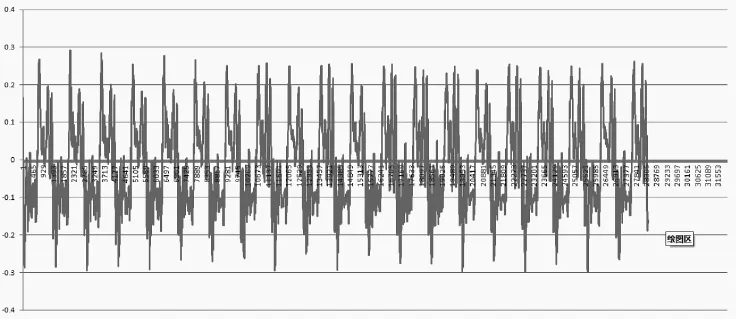
图10 实测的系统响应
4 结论
本文提出了一种基于二自由度控制算法和摩擦DOB观测器的炮控系统设计方法。基于该算法可以得到响应快、误差小的指令跟随特性和更高的载体扰动隔离能力。本文给出的摩擦DOB观测器和二自由度控制算法为实际应用提供了参考,并易于系统实现。仿真和实验结果都验证了该方法的有效性。
[1]马晓军,袁东,臧克茂,等.数字全电式坦克炮控系统研究现状与发展[J].兵工学报,2012,31(1):69-75.
[2]GOREZ R.New design relations for 2-DOF PID-like control system[J].Automatica,2003,39(6):901-908.
[3]MASANORI Y,TAKASHI S.A two degrees of freedom PID control system,its features and applications[C]//Proc of 5th Asian Control Conf.Melbourne,2004:456-459.
[4]胡明慧,邵惠鹤.基于灵敏度函数的二自由度控制系统设计与应用[J].上海交通大学学报,2007,41(11):1792-1795.
[5]LIAW C M.Design of a two-degree-of-freedom controller for motor drives[J].IEEE Trans on Automatic Control,1992,37(8):1215-1220.
[6]李嘉全,丁策,孔德杰,等.基于速度信号的扰动观测器及在光电稳定平台的应用[J].光学精密工程,2011,19(5):998-1004.
[7]李伟,王立平,关立文.一种二阶系统最优Q滤波器DOB设计方法研究[J].机械设计与制造,2011(6):1-3.
[8]王福超,田大鹏,王昱棠.基于简化干扰观测器的光电平台稳定与评估[J].国外电子测量技术,2015,34(12):13-17.
Design of the Artillery Stability Control System Based on DOB and Two Degree of Freedom Controller
WANG Hai-wen1,QU Jun-hai2,SUN Han-qing2,PANG Ji-wen2
(1.Automation Department of Taiyuan University of Science&Technology,Taiyuan 030024,China;
2.North Automatic Contorl Technology Institute,Taiyuan 030006,China)
The artillery stability control system performance can be influenced by the external disturbance such as the road condition,the impact moment caused by the gun firing,the change of the friction torque,the measurement noise,the change of the moment of intertia and so on.Order to solve this problem,a DOB observer and two degree of freedom control algorithm is introduced to reduce the influenc of friction on the performance of the system,and to improve the ability of the system to isolate the disturbance of the carrier.Simulation and experimental results show that the proposed algorithm can effectively improve the stability accuracy and speed servo performance of the system.
artillery stability control system,disturbance observer,two degree of freedom,stability accuracy
TP273;TJ3
A
1002-0640(2016)12-0117-04
2015-11-05
2015-12-27
王海稳(1977-),女,河北邢台人,硕士研究生。研究方向:智能控制,二自由度控制。