道路养护车上料机构仿真研究
2017-01-13王金刚于作鑫甄冬赵祥
王金刚于作鑫甄冬赵祥

文章编号:1000033X(2016)12010604
收稿日期:20160519
基金项目:天津市自然科学基金(14JCYBJC42100)
摘要:在养护车上料机构设计阶段对其进行运动仿真,利用ADAMS/Cable建立了道路养护车上料机构的动力学模型。通过对工作部件的运动进行约束,解决了ADAMS中多体接触时仿真容易失败的问题,顺利得到机构工作部件的位移、速度、加速度和绳索受力的数据,及其危险工况的发生时间,为进一步分析优化该机构的工作特性提供了基础,并且能提高上料机构的设计效率。
关键词:道路养护车;上料机构; ADAMS;多体接触
中图分类号:U415.52文献标志码:B
Research on Simulation of Loading Mechanism on Road Maintenance Vehicle
WANG Jingang1, YU Zuoxin1, ZHEN Dong1, ZHAO Xiang2
(1. School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130,China;
2. Tianjin Fire Research Institute of MPS, Tianjin 300381, China)
Abstract: During the design stage of the loading mechanism, the motion simulation was carried out, and a kinetic model of cable lifting was proposed based on ADAMS/Cable. The motion trajectory of the working parts were analyzed in the process of simulation, verifying the structural rationality of the mechanism. The simulation failure of multibody contact in ADAMS was solved by the constraints of the working parts movement. The displacement, speed, acceleration and cable force of the working parts were attained, which provided the basis for analyzing the work characteristics of the mechanism and improved the efficiency of loading mechanism design.
Key words: road maintenance vehicle; loading mechanism; ADAMS; multibody contact
0引言
沥青道路养护车可对沥青路面出现的坑槽、网纹、裂缝、油包等进行处理,以路面坑槽修补为主要作业内容[16]。
养护车上料机构的作用是将沥青原料从车辆底部提升到料箱的入料口处。上料机构在开始工作和突然结束工作时容易出现振动,尤其当提升机装载物料较多时,物料容易因振动散落丢失,造成浪费。振动冲击还会使机构的绳索产生疲劳,加大机构中绳索与滑轮之间的摩擦,造成绳索疲劳破坏[7]。如果在设计阶段就对上料机构进行仿真,则可以通过仿真结果分析其结构是否合理,从而避免上述情况发生。
绳索的动力学行为非常复杂,未施加预紧力的绳索会在流体中晃荡,绳索与滑轮的弹性接触、绳索的收放和缠绕以及与其他物体的接触,都增加了柔索建模的困难,阻碍了精确模型的建立。关于柔性绳索的仿真研究早期常用数值建模,但是柔性绳索体的数学仿真模型难以精确、有效地建立。要足够准确地反映绳索的动力学特性,需编制的相应计算程序规模很大,且难以保证较高的可靠性[8]。近年来,随着商用软件的发展,许多学者通过动力学软件研究绳索的仿真问题。其中应用广泛的有丁振兴等[9]通过运用CMD语言完成的钢丝绳建模,该方法通过Bushing建立柔性绳索仿真模型,被称为bushing法。该方法仿真精度较高,可模拟钢丝绳起吊时与卷筒的缠绕及钢丝绳的振动;但是其建模困难,且无法完成参数化建模和优化[10],不具备通用性,不熟悉ADAMS二次开发的用户很难使用。
本文利用ADAMS/Cable 成功创建上料机构的动力学模型,并对其进行仿真分析,得到料箱的位移、速度、加速度和绳索应力的相关数据,能够提高上料机构的设计速度和质量。
1ADAMS/Cable模块
ADAMS/Cable柔性绳索建模仿真解决方案是MSC公司开发的集成在ADAMS中的模块,其主要功能是满足用户对绳索类问题的快速建模与精确求解,模拟的对象包括各种钢丝绳、传送带和胶片等传动装置,并且具有对各种滑轮机构的建模功能。
在ADAMS/Cable模块中绳索有2种建模方式可以选择。
(1)简化模型(coupler mode):忽略该模型绳索的质量和惯性,绳索被认为是滑轮之间沿切线方向的具有刚度的虚拟体;绳索的速度由滑轮的角速度积分得到;绳索的张力通过绳索两端的几何变形计算得到;该绳索模型计算速度快,并且能准确得到滑轮的载荷。
(2)离散模型(guide mode):绳索被离散成一段段的parts、joints和forces;将离散的绳索在几何上表示为球体,利用广义力进行柔性连接。轴套力的计算方程为
F=-KX-CX[DD(-20x][KG*3]·[DD)]+F0(1)
式中:F为模型受的力;F0为模型初始受力;K为模型刚度;C为模型阻尼;X为模型位移;X[DD(-20x][KG*3]·[DD)]为模型速度。
使用离散模型计算时,因为考虑到了绳索的质量和惯性的影响,故能够得到精确的绳索晃荡姿态,模拟出绳索和滑轮的相互接触力,但是计算速度会变慢。
2上料机构结构设计
上料机构的主要作用是为沥青路面养护车的沥青混合料搅拌箱装载原料,液压马达带动绞车为上料机构的运动部件提供动力,使上料机构完成上移和翻转2个动作。为满足上述要求,设计的上料机构总体结构如图1所示,其中为使上料机构能完成翻转动作,内导轨和外导轨均有弯折部分。料箱满载时150 kg,要求最终倾倒角度大于55° ,钢丝绳直径为9 mm,最小破断拉力为313 kN。
3ADAMS 建模
将上料机构在ADAMS view中建模,模型如图2所示。定义料箱轮子和轨道之间为Impact接触。定义锚固点、滑轮特性、绳索特性、绞车驱动函数为step(time,0,0,2,200)+step(time,10,0,12,-200)。绳索特性选择coupler mode。进行仿真时的参数如表1所示。
3.1ADAMS轨迹分析及绳索与料箱连接点的确定
上料机构的框架已经基本确定,但绳索与料箱的连接点还未确定,绳索在料箱上的固定位置会对机构的工作性能产生较大影响。现选择料箱3条棱中点的一处作为连接绳索的固定点,通过分析上料机构工作过程中3个点的轨迹,获得选择不同固定点时机构的工作状态,从而确定固定点的位置。
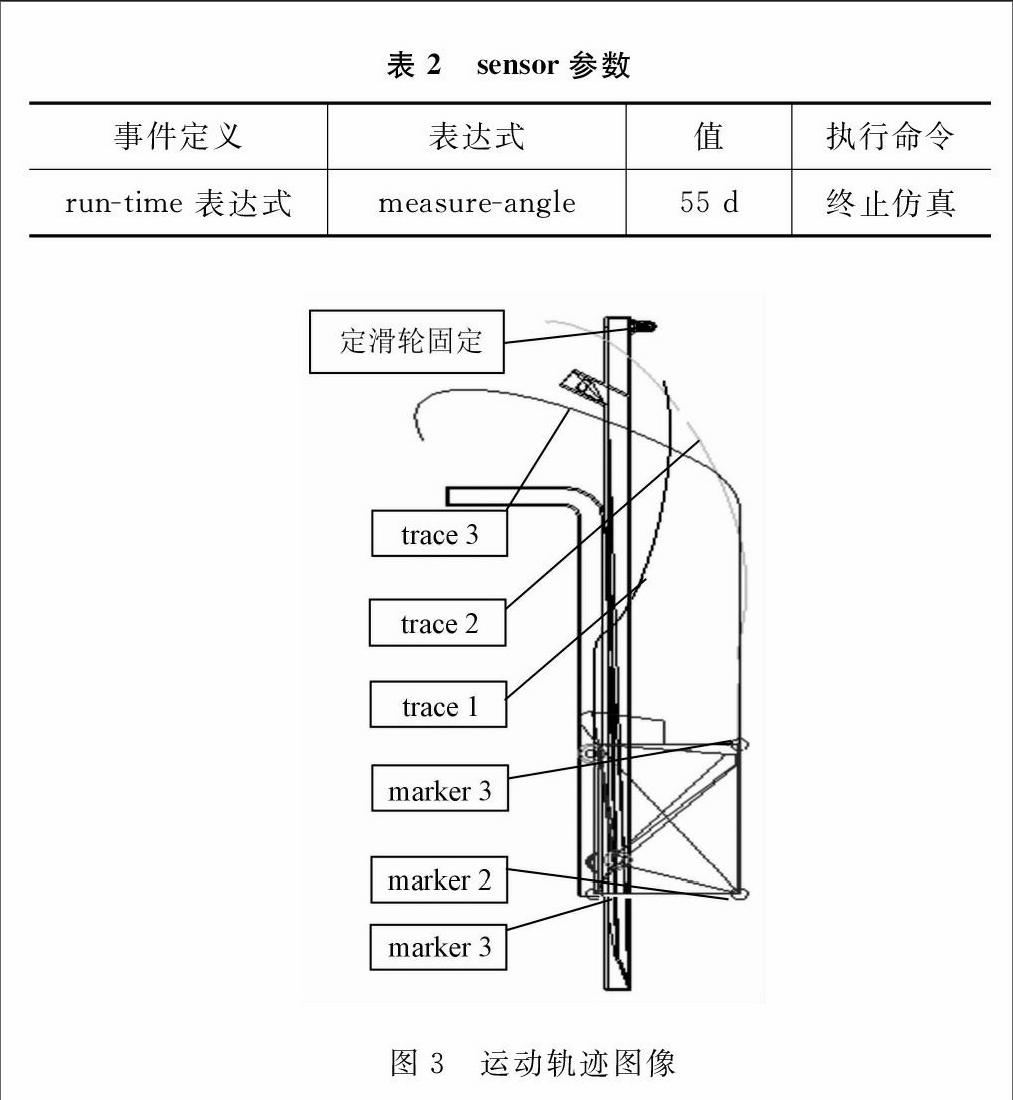
为得到3个备选点的轨迹,首先在上述3处分别添加mark点mark 1,mark 2和mark 3,然后给系统施加一个空间方向恒定向上的力,以便使料箱完成上料倾翻的动作。设置一个传感器,sensor设置参数如表2所示。触发条件为greater than or equal。
表2中的measureangle是测量函数,用来描述料箱的倾斜角度。该传感器的作用是当料箱倾角不小于55° 时停止仿真。
当仿真完成后,获得3个mark点的轨迹trace 1,trace 2,trace 3,如图3所示。发现只有尾端在定滑轮固定点的右侧,即绳索固定在mark 1时,料箱才能顺利完成倾倒。
W=∫F·cos αds(2)
式中:W为绳子拉力所做的功;F为绳索的拉力;α为力与mark 1点位移的夹角;s为mark 1点位移。
由式(2)可知,α的值越小,绳索拉力对料箱的功分量越大,将料箱压向导轨的分量就会越小,机构工作效率就会越高,结构受力越合理。在trace 1上均匀测量5个位置的α值,结果分别为:4.36° ,710° ,9.42° ,8.06° ,3.71° 。α的值已经很小,因此选择mark 1点作为固定点可以保证机构的效率和良好的工况。
3.2料箱与导轨多接触问题研究
ADAMS根据Hertz接触理论,采用Impact函数提供的非线性等效弹簧阻尼模型作为接触力的计算模型。该模型的接触力由两部分构成:一是2个构件之间相互切入而产生的弹性力;二是由相对速度产生的阻尼力。计算公式为
Fni=Kδei+CVi(3)
式中:Fni为法向接触力(N);K为Hertz接触刚度;δi为接触点的法向穿深度;e为力指数;C为阻尼系数;Vi为相对速度。
由于该模型定义料箱轮子与导轨之间有多个Impact接触,求解困难且容易发生错误。定义接触后,求解速度变慢,经过分析认为由于接触力跃变太大而产生数值困难,使仿真出错停止。通过分段仿真法可以避免这些失误[11],即将仿真的整个时间分割成数个小时间段分别进行仿真,不断调用save命令和reload命令以实现目的;但是该方法会得到许多结果文件,需要编写相应程序来完成对数据的整理,并且会增加仿真时长。
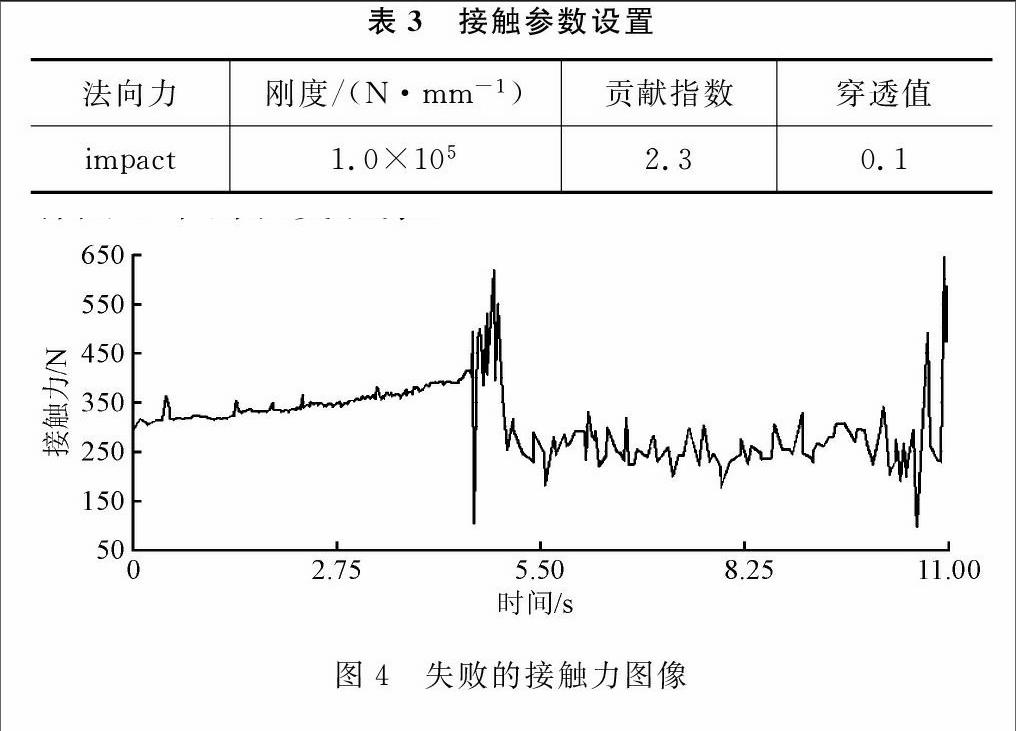
ADAMS的接触力模型允许阻尼达到最大值后构件之间的相互切入还可以继续。如果可以控制切入量始终保持在合理的范围内,法向接触力的数值跃迁状况就会得到改善,仿真失败的问题就能得到解决。由于该机构的轨迹是由轨道决定的,其运动轨迹可以准确获得。利用3.1中创建的mark 1和trace 1在connectors中建立一个point to curve约束来规范料箱的运动,使车轮的渗入量保持在一个合理的范围,从而避免了接触力的跃变过大,接触参数如表3所示。
表3接触参数设置
法向力刚度/(N·mm-1)贡献指数穿透值
impact1.0×1052.30.1
仿真失败时料箱轮子的接触力时间图像如图4所示,接触力曲线跃变严重,曲线峰值变化很大且无规律,最终到11 s时导致仿真失败。规范料箱运动轨迹之后得到的相同时段内的料箱轮子接触力时间图像如图5所示,接触力曲线比较平缓,没有图4中的跃变现象。
4结果分析
对调试好的模型进行仿真,得到料箱质心处的位移、速度、加速度和绳索张力随工作时间变化的图像,如图6~9所示。
在4.5 s前,位移、速度和绳索张力变化平缓,当料箱开始倾斜即4.5 s处时,曲线的变化趋势发生改变。图6显示料箱质心位移随工作时间变化平缓。从图7可以看出,工作时间从4.5~6 s时料箱质心速度变化比较大,这是由于料箱的空间运动形式从单纯的平移变成平移加旋转,从而使得料箱质心处速度开始变慢。如图8所示,加速度的非周期震动由轮子与导轨的切入量变化引起,在实际工况中加速度变化会平缓许多。图9中钢丝绳受力最大值为1 700 N,产生在料箱即将反转之前,在料箱完成倾翻动作之后钢丝绳受力变小,这是因为料箱倾斜以后得到竖直方向的支持力,会使绳索受力减轻。
综合以上数据及分析结果可知,上料机构的危险工况是料箱在倾翻动作时发生的,此时的绳索受力最大,且应力变化较快。为减小该工况的应力及应力变化速度,应避免上料机构产生严重的冲击载荷,使导轨弯折更加平滑,从而使各上料机构的工作更加平稳。结合实际工作,这些数据还将为该机构的进一步研究提供基础。
5结语
本文利用ADAMS/Cable模块实现绳索机构的全参数化建模,效率高并且能得到准确的仿真结果。在仿真过程中,通过对料箱运动轨迹的分析以及约束,验证了选择绳索固定点的正确性,并克服了ADAMS中多体接触容易仿真失败的问题,为此类仿真工作提出了新方法。通过对仿真数据的分析,验证了该上料机构的结构满足设计要求,且找到了该机构的不足之处,并指明了改进方案。
参考文献:
[1]李海斌,杜志彬,边杨.“十三五”时期中国专用汽车市场发展的宏观环境分析[J].专用汽车,2014(11):7072.
[2]胡忠录,李应强.沥青路面养护快速化探讨[J].筑路机械与施工机械化,2010,27(11):6264.
[3]杨艳妮.外燃式混合料加热滚筒设计及热能利用研究[D].西 安: 长安大学,2012.
[4]靳长征.多功能养护车应用之辩[J].工程机械与维修,2015(3):16.
[5]靳炜.自行式沥青路面养护车工程配置的量化分析[J].筑路机械与施工机械化,2011,28(5):6567.
[6]霍太林.道路综合养护车现状及产品开发研究[J].筑路机械与施工机械化,2006,23(1):2730.
[7]李永波,魏禹.基于虚拟样机滑轮绳索机构的建模及仿真分析[J].应用科技,2013,40(3):15.
[8]胡晓楠,张建斌,赵国伟.柔性绳索在空气阻力作用下的动力学仿真研究[J].机械科学与技术,2010,29(10):13341337.
[9]丁振兴,陶元芳,薛孝磊,等.基于CMD语言的起重机钢丝绳建模方法研究[J].起重运输机械,2012(2):1721.
[10]韩莉莉,许军辉,宁祎,等.基于ADAMS/Cable模块的柔索驱动仿真研究[J].中原工学院学报,2014,25(6):15.
[11]石明全.基于ADAMS的多接触问题研究[J].计算机工程与应用,2004,40(29):220222.
[责任编辑:党卓钰]
