GNSS海洋反射信号软件模拟器设计
2017-01-13李博闻杨东凯祁永强
李博闻,张 波,杨东凯,祁永强
(北京航空航天大学电子信息工程学院,北京 100191)
GNSS海洋反射信号软件模拟器设计
李博闻,张 波,杨东凯,祁永强
(北京航空航天大学电子信息工程学院,北京 100191)
在GNSS-R海洋遥感探测中,机载试验是一种重要手段;针对GNSS-R机载试验需要耗费巨大人力、物力以及可重复性差的问题,研究并设计了一种反射信号软件模拟器,介绍了模拟器的总体结构、流程图、关键参数、主要模块及用户界面;该模拟器在GNSS直射信号模拟器的基础上,在直射通道之外并行增加了反射信号通道;通过分析导航卫星反射信号的特点,并利用基于Z-V模型的GNSS海洋反射信号模型,配置机载GNSS海洋反射信号的时延、功率和多普勒频率等参数,从而模拟产生多颗星的多条反射信号;该模拟器可分别生成直射、反射信号两个数字中频文件,直接送入GNSS-R软件接收机进行接收处理;实验结果表明GNSS-R软件接收机的接收处理结果与设定的基于Z-V模型的相关功率曲线的相关系数为0.997 7,模拟器产生的反射信号与真实信号相关特性几乎一致,能根据用户输入的不同参数模拟输出导航卫星反射信号。
卫星导航;反射信号;Z-V模型;数据拟合;模拟器
0 引言
GNSS-R(global navigation satellite system-reflections)技术是自20世纪90年代以来逐渐发展起来的GNSS的一个新型分支,是国内外遥感探测和导航技术领域研究热点之一[1]。GNSS-R技术利用反射的导航卫星伪码信号或者载波信号,通过提取探测目标反射面特性,可广泛应用于海面测风、海面测高、海冰探测、海面溢油、土壤湿度等领域,具有重要的研究意义和广阔的应用前景[2 4]。随着全球卫星导航系统的不断建设和发展,导航信号的分析和模拟也受到了越来越多的重视[5 6]。但是GNSS-R实验存在以下几个问题:对测试场景有苛刻的要求,可重复性差;实验成本高,需要耗费大量的人力物力才能进行;对于精度的测试尚无验证手段。并且国内外的反射信号模拟器研究起步较晚,无论是西班牙Hyuk Park等人[7]提出的一种改进的P2EPS模拟器,还是意大利Pierdicca N等人[8]描述的SAVERS模拟器,均不能直接产生反射信号。
本文在分析基于Z-V模型的GNSS海洋反射信号模型基础上,结合已有的直射信号模拟器,给出了反射信号软件模拟器的设计结构,具体介绍了反射信号的产生流程、关键参数及用户界面,并对产生的反射信号进行了验证。
1 基于Z-V模型的GNSS海洋反射信号模型
由海面散射相关函数可知,海面散射信号相关功率也是码延迟和多普勒的函数,因此可以用来反演海面风场。而Valery U.Zavortny和Akexander G.Voronovich在研究利用GPS海面散射信号进行海面风场遥感的过程中,基于双基雷达方程并使用Kirchhoff近似的几何光学方法建立了GPS海面散射信号的时延-多普勒相关功率模型[9]。模型的形式如下:

式中,R0,R分别为GPS卫星和接收机到散射点的距离;Ti是相干积分时间;D为接收机天线的增益;Λ是GPS C/A码的自相关函数;S为多普勒滤波函数;σ0为粗糙海面的标准化散射截面;→ρ为镜像反射点到平均海面上某一点的向量。
由于海面的起伏不平,接收机接收到的反射信号是多个不同反射面的反射信号的叠加,各个信号之间有不同的时延。因此,在模拟过程中,可以设定海面发射信号为多条等时延间隔、不同功率的反射信号的叠加,如图1所示。
叠加之后海面反射信号相关函数的波形如图2所示。不同时延不同功率的反射信号叠加使得相关结果峰值后移,拖尾延长。
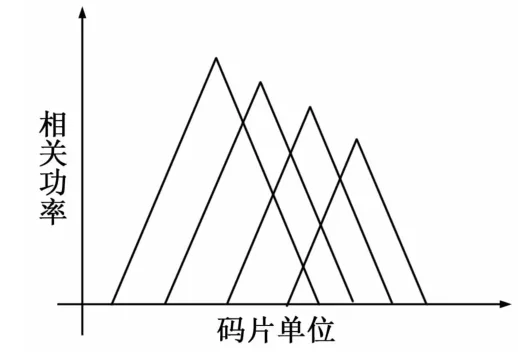
图1 多条等时延间隔、不同功率反射信号叠加
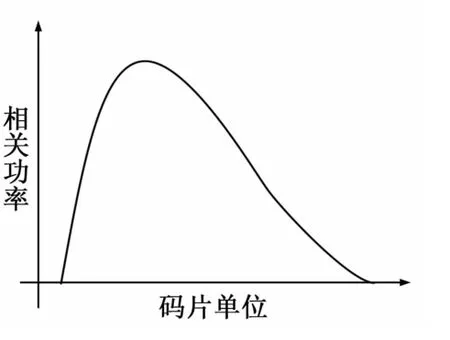
图2 叠加后海面反射信号相关功率
上述模型中,海面反射信号的相关函数波形可由Z-V模型的时延一维相关功率曲线得到,再由此相关功率曲线的数据来建立反射信号的时延功率模型。通过曲线拟合,将Z-V模型得到的相关功率曲线反推成16条等时延间隔、不同功率的反射信号叠加拟合的结果,并分别得到各条反射信号的时延、多普勒和功率参数。
2 海洋反射信号软件模拟器设计
2.1 软件模拟器总体结构
GNSS海洋反射信号软件模拟器的系统组成见图3。其中,用户输入配置信息既包括系统频点、接收机位置和运动轨迹、仿真时刻等产生直射信号所需的参数,还含有反射信号的相关参数配置如反射信号频点及星号、计算得到各条反射信号的时延及功率等。
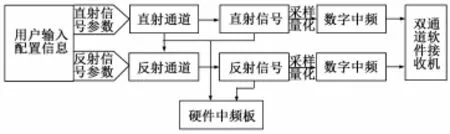
图3 GNSS海洋反射信号软件模拟器的系统组成
在反射信号软件模拟器的模拟过程中,首先经过直射通道生成直射信号,在此基础上利用配置的反射信号信息如时延、功率,修改反射通道中的信号参数,从而生成反射信号。生成的直射和反射信号分别经过采样、量化、合路得到数字中频信号,可以直接送入双通道软件接收机进行相关处理。
2.2 直射和反射信号生成过程
直射、反射信号的生成过程如图4所示。直射参数和反射参数分别用于模拟器生成直射信号(虚线上部的直射通道)和反射信号(虚线下部的反射通道)。对于直射信号的生成过程与直射信号模拟器生成过程类似。首先,读取设置的参数(系统频点、仿真时刻、接收机位置和运动轨迹、误差选择等)后经过模拟器初始化和自检过程,启动计时器计算当前仿真时刻读取星历信息并计算各颗卫星的参数如卫星位置、速度、加速度,然后在计算完成误差参数的基础上得到信号状态参数,结合并行处理的分线程中导航电文生成模块所生成的导航电文,生成直射信号状态信息。
直射通道中得到的直射信号状态信息用于反射通道中反射信号的生成。其中,卫星和接收机的位置信息用于计算镜面反射点的时间延迟,从而可以得到一组基于镜面反射点的等时间间隔的反射信号时间延迟。利用上文介绍的基于Z-V模型的GNSS海洋反射信号模型,可以建模拟合得到各条反射信号的时延、多普勒和功率参数,并作为反射参数输入反射通道。结合直射信号状态参数,更新所需卫星的伪距、相位、功率、导航电文等信息,生成各条反射信号状态信息。
上述过程得到的直射信号和反射信号状态信息,可以直接保存为基带数据文件,也可以经过数字中频处理模块分别进行采样、量化、合路得到数字中频信号保存下来,还可以打包发送给硬件中频板用于射频信号的生成。
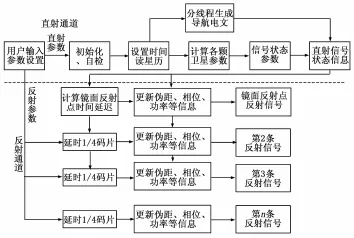
图4 直射、反射信号生成过程
2.3 镜面反射点时间延迟的计算
在GNSS-R的相关应用中,常常利用经过镜面反射点的反射信号作为一个基准参考值。经过镜面反射点的反射信号相比于直射信号走过了更长的路径,其相差的总路径延迟ρE主要为空间几何路径延迟,主要由反射信号接收机到反射面的高度hR和卫星仰角θ所决定[10],其关系可表示为:

式中,t为镜面反射点的反射信号相比直射信号到达接收机的时间延迟,c为光速3×108m/s。若考虑GPS系统的L1频点,则其C/A码的码速率Rc为1.023×106chips/s,则镜面反射点的反射信号相比直射信号到达接收机的码片延迟τ为:

3 反射信号模拟器的软件实现及验证
由图4的直射、反射信号生成过程,可得GNSS反射信号模拟器软件处理流程如图5所示。
根据图5所示的GNSS反射信号模拟器软件处理流程,在直射信号模拟器中增加反射信号生成处理的模块和功能,其软件用户界面如图6所示,可以在界面中设置频点、时间、接收机位置、屏蔽角、反射信号模型、数字中频参数等。界面中间的列表显示产生的直射信号及反射信号(带*为反射信号,图6中为“*Gps L1 3”,表示GPS L1频点3号星的一条反射信号)的各项信息如卫星的位置、仰角、方位角、伪距、多普勒等。
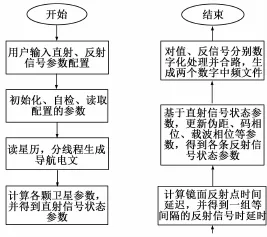
图5 GNSS反射信号模拟器软件处理流程

图6 软件模拟器用户界面
反射信号的参数配置如图7所示,可以界面中选择反射模式如地面反射或海面反射,并设置所需产生反射信号的频点、星号,以及各条反射信号的时延、多普勒频移和功率衰减等参数。

图7 反射信号参数配置
在基于Z-V模型的GNSS海洋反射信号模型仿真中可设置参数:接收机高度为5 km,GPS卫星仰角计算得为54.44°,风速为5 m/s,风向为0°;在图6的用户界面中设置选择GPS L1频点并设置时间为2015年10月12日1点30分0秒,接收机位置设置为经度116.3,纬度39.9,高度5 km,反射信号模型选择机载模型并设置方向角180°,速度120 m/s,加速度0。信号产生模块选择产生数字中频信号,设置采样率Fs为16.369 MHz,中频频率为3.996 MHz,量化比特为8 bit。通过公式(3)可以计算得到镜面反射点的反射信号相比直射信号到达接收机的码片延迟τ为27.74 chips,基于τ得到一组时间间隔为0.25 chips的反射信号时延,然后利用反向拟合得到16条反射信号时延和功率衰减参数在图7中进行反射信号参数配置。
在各项参数配置完成之后可以开始生成信号状态信息,由于是选择生成数字中频信号,所以在模拟器程序对应路径下分别生成直射信号数字中频文件“IF_I_N.bin”和相应的反射信号数字中频文件“IF_I_N_R.bin”,可以直接由双通道软件接收机进行相关处理。
利用Z-V模型可以仿真得到海面反射信号Z-V模型的曲线如图8(a)所示,可以看出由于曲线是由多条不同时延的反射信号叠加而成,这使得相关结果峰值后移,拖尾延长。双通道软件接收机接收直射信号和反射信号数字中频文件后处理结果如图8(b)所示,图中横坐标16个单位为1chips,也可以看出16条反射信号叠加后的相关结果也有明显的拖尾现象。为了更加精确的进行验证,统一横纵坐标后将图8(a)和图8(b)做匹配对比,其结果如图8(c)所示,可以看出Z-V模型仿真结果和模拟器产生的反射信号处理结果相似程度很高,相关系数为0.997 7,表明模拟器产生的反射信号与真实信号相关特性几乎一致,可以用来进行反射信号的进一步研究。
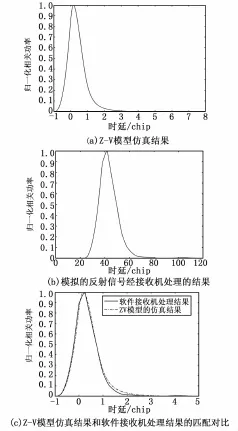
图8 反射信号生成及验证
4 结束语
本文利用基于Z-V模型的GNSS海洋反射信号模型,在GNSS直射信号模拟器的基础上设计了一种反射信号软件模拟器,给出了模拟器的总体结构、流程图、关键参数、主要模块及用户界面,详细论述了反射信号的生成过程,包括镜面反射点时间延迟的计算。对于软件实现,给出了整个实现流程及软件接收机的处理结果。测试结果表明Z-V模型仿真结果和模拟器产生的反射信号处理结果相比,相关系数优于0.99,对GNSS反射信号模拟器的研究具有一定指导意义。
[1]杨东凯,张其善.GNSS反射信号处理基础与实践[M].北京:电子工业出版社,2012.
[2]Garrison J L,Katzberg SJ.The application of reflected GPSsignals to ocean remote sensing[J].Rem.Sen.Environ,2000,73:175 -187.
[3]刘经南,邵连军,张训械.GNSS-R研究进展及其关键技术[J].武汉大学学报(信息科学版),2007,32(11):955-960.
[4]Martin-neira M,Caparrini M,Rossello F,et al.The PARIS concept:an experimental demonstration of sea surface altimetry using GPS reflected signals[J].IEEE Transactions on Geo-science and Remote Sensing,2001,39(1):142-150.
[5]侯 博,谢 杰,刘光斌.卫星信号模拟器的发展现状与趋势[J].电讯技术,2011,51(5).
[6]刘丽丽,王 可.卫星信号模拟器研究现状及发展趋势[J].全球定位系统,2010,03.
[7]Park H,Camps A,Pascual D,et al.Improvement of the PAU/PARIS end-to-end performance simulatior(P2EPS)in preparation for upcoming GNSS-R missions[A].2013 IEEE International Symposium of Geoscience and Remote Sensing(IGARSS)[C].IEEE,2013:362-365.
[8]Pierdicca N,Guerriero L,Giusto R,et al.SAVERS:A Simulator of GNSS Reflections FromBare and Vegetated Soils[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(10):6542-6554.
[9]Zavorotny V,Voronovich A.Scattering of GPS Signals from the O-cean withWind Remote Sensing Application[J].IEEETGRS,2000,38(2):951-964.
[10]张益强.基于反射信号的海洋微波遥感技术[D].北京:北京航空航天大学电子信息工程学院,2008.
Software Simulation Design of GNSS Ocean Reflection Signal
Li Bowen,Zhang Bo,Yang Dongkai,Qi Yongqiang
(School of Electronic and Information Engineering,BUAA,Beijing 100191,China)
Airborne experiment is an important way of GNSS-R ocean remote sensing.In order to solve the problem that GNSS-R airborne experiment requires huge manpower and material resources and it has a poor repeatability,this paper studied and designed a kind of GNSS reflected signal simulator,and the structure,flow chart,key parameters,components and user interface of the simulator were presented.This reflected signal simulator software based on the direct GNSS signal simulator,and both have direct signal channels and reflected signal channels parallel.Through analyzed the characteristics of navigation satellite reflected signal,and used a GNSS sea reflected signal model that is based on Z-V model,set time delay,Doppler frequency and power parameters of airborne GNSS ocean reflection signal,to simulate more multiple reflections of different satellites.This simulator could generate two intermediate frequency files of direct and reflected signals respectively that can be send to GNSS-R software receiver.The simulation experiment results show that the correlation coefficient between the Z-V model theory curve and the result of the reflection signal simulator is 0.9977,the reflected signals of simulator have a same correlated characteristic with the real signals,and it can according to the different parameters of user’s input analog output navigation satellite reflected signal.
GNSS;reflected signal;Z-V model;data fitting;simulator
1671-4598(2016)08-0197-03
10.16526/j.cnki.11-4762/tp.2016.08.053
:TN96
:A
2016-01-20;
:2016-02-23。
国家自然科学基金(61171070)。
李博闻(1990-),男,湖北人,在读硕士生,主要从事GNSS-R理论与应用方向的研究。
杨东凯(1972-),男,山东人,教授,博士生导师,主要从事导航定位及GNSS-R应用方向的研究。
