基于PXI和RT-LAB的永磁同步电机快速控制原型设计
2017-01-13朱鹏程邱华静马海涛李鸿彪
朱鹏程,邱华静,马海涛,李鸿彪
(上海科梁信息工程股份有限公司,上海 200233)
基于PXI和RT-LAB的永磁同步电机快速控制原型设计
朱鹏程,邱华静,马海涛,李鸿彪
(上海科梁信息工程股份有限公司,上海 200233)
针对永磁同步电机控制器存在算法复杂、代码量大、开发周期长等问题,实现一种基于虚拟仪器的永磁同步电机快速控制原型系统;设计快速控制原型硬件平台,并对硬件设备进行选型,包括PXI虚拟仪器、功率驱动模块、电机对拖台架等;研究永磁同步电机转子磁场定向控制原理基础上,以一台3.1 k W被测电机为被控对象,在RT-LAB实时仿真软件环境下,搭建永磁同步电机控制算法模型;实验结果表明,电机转速与定子电流均可无偏差跟踪参考给定值,系统控制性能良好,且该系统使电机控制器开发周期缩短、成本降低。
快速控制原型;虚拟仪器;永磁同步电机
0 引言
永磁同步电机作为电动汽车的关键部件之一,与感应电机相比具有体积小、重量轻、功率密度高等优点[1]。但是由于电动汽车工作环境恶劣、系统干扰强等不确定因素,永磁同步电机高性能控制往往不易实现。近年来,半实物仿真技术得到快速发展,RCP技术更是在实际工程开发中得到广泛应用[2]。将快速控制原型系统用于车辆电机控制器开发可快速验证控制算法的有效性,具有研发成本低、开发周期短、可进行极端测试等优点。
文献[3]采用dSPACE软硬件环境设计了一套用于大功率电力驱动系统的测试、教学实验平台,实现了电机控制实时仿真。文献[4]为实现电机控制器的性能设计与验证,提出了基于RT-LAB和JMAG的永磁同步电机硬件在环(HIL)实时测试平台。文献[5]基于矢量控制方法,以DSP为核心,设计并实现了电流、速度的检测及控制算法。但dSPACE通常价格昂贵、扩展性能较差,HIL系统将真实功率模块及电机用虚拟对象取代,DSP开发则需要耗费大量精力用于硬件设计与代码编写。
本文基于上述背景,提出一种基于虚拟仪器的永磁同步电机快速控制原型系统。首先设计快速控制原型硬件平台,并对硬件设备进行选型,包括PXI虚拟仪器、功率驱动模块、电机对拖台架等;其次在研究永磁同步电机矢量控制的基础上,以一台3.1 KW被测电机为被控对象,在RT-LAB实时仿真软件环境下,搭建永磁同步电机控制算法模型。最后实验结果表明,电机转速与定子电流均可无偏差跟踪参考给定值,系统控制性能良好,且该系统使电机控制器开发周期缩短、成本降低。
1 快速控制原型系统结构及原理
快速控制原型是在控制器研发初始阶段,快速地建立被控对象及控制器模型,并对整个控制系统进行多次在线试验来验证控制系统软、硬件方案的可行性,这个过程便是快速控制原型。通过快速控制原型实时测试,在设计初期即可发现存在的问题,从而通过修改模型或参数,再进行实时测试,最终产生一个满足设计需求的控制原型。
基于RT-LAB的快速控制原型仿真系统通过系统开发主机和PXI实时目标机的模式,将上位机用图形化工具建立好的模型拆分、编译并下载到目标机平台上实时化运行,并通过上位机窗口对目标机的整个运行过程进行实时监控。整个过程省去了大量代码编程和系统配置工作,同时也充分利用了PXI目标机的实时特性,生成紧凑而有效的实时代码。系统硬件采用NI公司的PXI代替传统的OP5600作为系统下位机,实现快速控制原型开发,同时降低系统的硬件成本。
图1是基于PXI和RT-LAB的快速控制原型系统原理图。系统开发主机运行在Windows系统,安装RT-LAB和MATLAB软件,完成电机控制器建模、状态显示、在线调参等工作。实时目标机选用PXI虚拟仪器,运行Red Hat实时操作系统,进行控制器模型实时计算。选用NI的PXI数据采集卡,实现数字控制器与实物被控对象之间的数据交换。
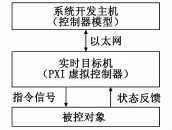
图1 快速控制原型基本原理
2 系统硬件设计
基于PXI和RT-LAB的永磁同步电机快速控制原型系统总体组成结构如图2所示。其中,硬件模块包括PXI车载控制器、功率驱动模块、电机对拖台架。
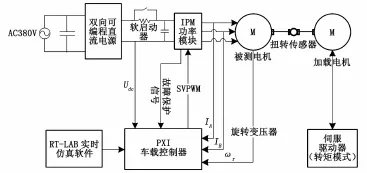
图2 快速控制原型系统结构框图
2.1 PXI车载控制器
PXI车载控制器采用美国NI公司的虚拟仪器设备[6]。其中,机箱选用PXIe-1082DC,具有4个混合插槽,3个PXI Express插槽,1个PXI Express系统定时插槽,可接受11 VDC至32 VDC的电源,方便试验人员上车测试。CPU采用Intel双核2.53 GHz的PXIe-8108。为实现永磁同步电机速度闭环矢量控制,系统选用FPGA板卡PXI-7854R和数据采集板卡、PXI-6289、PXI-6602。
FPGA板卡PXI-7854R用于产生旋变励磁信号及接受旋变反馈信号sin+、sin-、cos+、cos-,通过FPGA软件解算电机转子的位置与速度,PXI-7854R旋变解算如图3所示;数据采集板卡PXI-6289可实现电机直流母线电压、两相电流的反馈采集,同时通过内部总线传输方式,接受PXI-7854R解旋变结果;PXI-6602专门输出六路PWM波信号,实现智能功率模块上下桥壁开闭。
2.2 功率驱动模块
系统主电路采用交直交电压源变频变压电路,整流及直流变换部分采用双向可编程直流电源代替传统的三相不控整流电路及直流变换电路,省去了电路设计及参数选定等工作,具有安全、可靠、稳定等优点,缩短系统开发周期。双向电源可模拟电池的充放电过程,当运行在第一象限时电源给智能功率模块供电,实现电机的电动状态;当被测电机处于发电状态时,母线电能通过直流电源的四象限运行功能,将电能反馈至交流电网,实现能量回馈利用。双向可编程直流电源控制界面如图4所示,用户可以通过RS-232通讯,在线调节电源的输出电压,设置电流限幅及功率限幅值,检测电源系统实时状态。
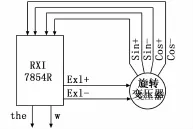
图3 PXI-7854R解旋变原理图

图4 双向可编程直流电源操作界面图
逆变器选用富士公司的智能功率模块(7 MBP50RA120)。该模块将功率开关IGBT和门极驱动电路集成在一起,内置有过流、短路、驱动电源欠压、过热等故障监测保护电路。当出现故障时,IPM会及时封锁基极驱动信号,同时发送故障报警号至PXI控制器,迅速触发软件保护,停止PWM波输出。
2.3 电机对拖台架
电机对拖台架包括1台3.1 KW被测电机和1台5 KW加载电机,中间装有扭矩转速传感器(ZH07),通过RS-232通讯,将转矩与转速信号实时传输至上位机监控界面。被测电机由功率驱动模块供电,位置信号由旋转变压器检测获取。加载电机采用安川伺服电机,通过外部模拟量控制输出转矩,同时加载电机可实现被测电机控制算法的突加负载、过载、带载启动等实验。
3 系统软件设计
3.1 PMSM数学模型
针对面贴式永磁同步电机有Ld=Lq,若考虑如下理想情况:
1)忽略电机铁心饱和;
2)不计涡流和磁滞损耗;
3)转子上无阻尼绕组,永磁体不计阻尼作用;
4)相绕组中感应电动势波形是正弦波。
PMSM在两相旋转坐标系(d-q系)的模型可以表示为:
1)电压方程:

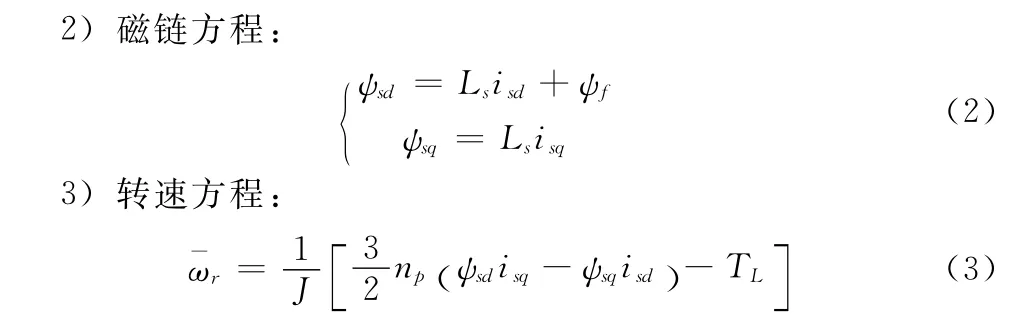
其中:usdq、isdq、ψsdq为d-q坐标下的定子电压,电流,磁链;ψf为转子永磁链;ωr电机角速度;np磁极对数;J机械惯量;TL负载转矩。
3.2 PMSM矢量控制原理
根据上述PMSM数学模型,本文选用isd=0的转子磁场定向控制方法。采用isd=0控制方式,则上述转速表达式(3)可表达为:

isd=0时,永磁同步电机等效为一台直流电机,三相定子电流中只含有转矩电流分量isq部分,且定子磁链空间矢量与永磁体磁链空间矢量正交。电机的输出转矩仅与q轴转矩电流相关,且成正比关系,即:

采用isd=0方法构成永磁同步电机转速、电流双闭环矢量控制系统结构如图5所示。系统由PMSM、电压型逆变器、电压传感器、电流传感器、速度与位置传感器、电流环控制器、速度环控制器、坐标变换等模块组成[7 8]。
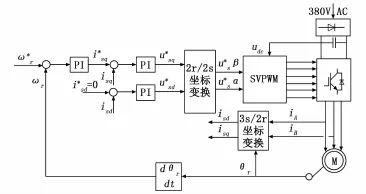
图5 永磁同步电机矢量控制系统框图
由图5可知,PMSM矢量控制系统实现过程是:给定速度指令值,与速度传感器检测到的电机转子速度信号进行比较,通过速度控制器进行调节,得到q轴电流控制器的给定信号。d轴电流控制器的给定信号is*d为0。经过电流采样得到定子两相电流,通过Clarke变换和Park变换得到两相旋转坐标系中的isd和isq,将它们作为反馈量送到电流环控制器。经过电流PI控制器得到电压给定值和,经过Park反变换得到两相静止电压和,最后通过空间电压矢量调制SVPWM模块得到六路PWM信号,驱动三相逆变器桥对PMSM进行控制。
isd=0控制方法的最大优点在于电机的输出转矩与定子电流幅值成正比,将永磁同步电机实现了解耦控制,无去磁作用,控制简单,因此得到了广泛的应用。
3.3 PMSM控制模型
永磁同步电机矢量控制算法采用基于模型设计方法实现。首先通过RT-LAB实时仿真软件以图形化界面搭建系统模型,然后通过编译将模型生成.c文件及.out文件,最后加载至PXI中,实现车辆电机控制算法快速开发。
3.3.1 控制系统整体模型
采用RT-LAB实时软件搭建的PMSM控制算法模型如图6所示。模型分成初始化模块、SC_console模型、SM_ FOC模型。SC_console为控制台模块,用于上位机与PXI的数据交互与监控。SM_FOC为主级子系统,主要实现PMSM矢量控制算法、数据采集与调理、故障保护等。
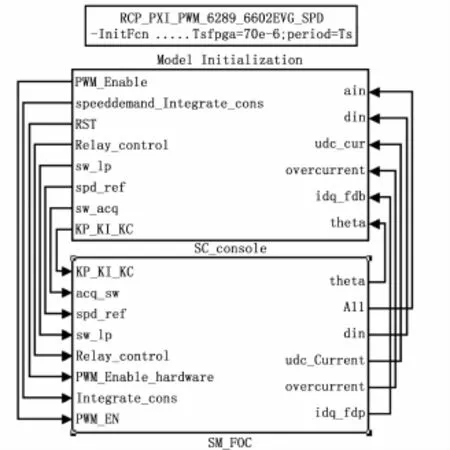
图6 控制系统整体模型图
3.3.2 矢量控制子模型
PMSM矢量控制算法模型如图7所示。模型输入为速度给定值、旋变反馈值、电流反馈值、速度控制参数、电流控制参数、控制器使能等,通过PXI-6602数字输出板卡的事件管理器,生产驱动IPM模块的六路SVPWM波。
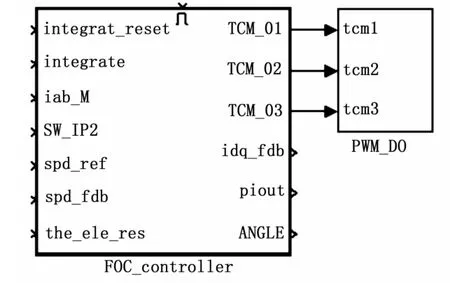
图7 矢量控制子模型图
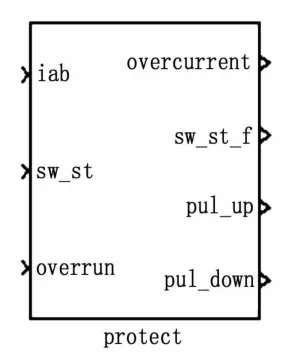
图8 故障保护子模型图
电机转子位置信号及速度反馈值由PXI-7854R解算获取后直接通过PXI的内部总线传至PXI-6289中;电机的U、V两相电流和直流母线电压信号通过PXI-6289模拟量输入模块采集获取,并对采集的模拟量信号进行低通滤波及信号调理。
3.3.3 故障保护子模型
故障保护子模型如图8所示,该子系统实现了过流、过压、欠压、短路、过热、软件overrun等常见故障的监测保护。
4 实验验证与分析
利用设计的RCP平台,选用一台3.1 kW的永磁同步电机作为被控对象,实现基于PXI和RT-LAB的永磁同步电机快速控制原型试验。其中,双向可编程直流电源的额定电压600 V,额定功率正负20 k W,额定电流正负40 A;IPM功率模块额定功率为10 k W。对于实际应用的不同功率等级,用户可以根据自身情况选取不同功率等级的器件。
图9是PXI-7854R解旋变与 Opal-RT公司的OP5600解旋变实验对比波形。可知,PXI-7854R能精确解算出电机转子位置信号,且利用PXI总线传输位置信号可使解旋变结果不受系统高频信号的干扰,确保电机矢量控制时转子磁场定向准确。
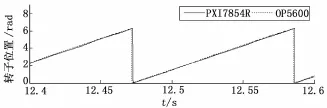
图9 旋变解算结果图
系统直流母线电压为500 V电压,加载电机恒定输出5 N ·m转矩。实验设定工况为:电机初始给定转速200 r/min,在3 s时通过斜坡给定转速500 r/min,在15 s时给定转速-500 r/min,在23 s时转速给定为-200 r/min。图10是电机运行在整个工况下的电流与转速曲线,图11是电机在500 r/min稳态下的电流与转速曲线。可以看出,电机转速与定子电流均可无偏差地跟踪参考给定值,系统控制性能良好。
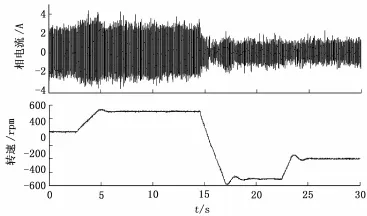
图10 电机电流与转速响应曲线
实验表明,该快速控制原型系统能实现PMSM的矢量控制算法验证与调试,并且它具有开发过程简单,无需手动编程,能够实时在线调试,大大缩短了开发周期,同时采用PXI虚拟仪器可大大降低系统成本,具有极大的工程应用价值。
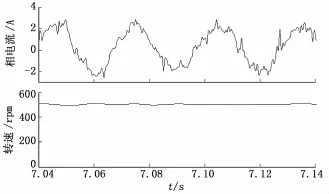
图11 电机电流与转速稳态曲线
5 结语
本文设计了一套基于PXI和RT-LAB的永磁同步电机快速控制原型系统。PXI作为车辆电机虚拟控制器,通过RTLAB实时仿真软件实现控制算法的模型化设计,被控对象采用真实的IPM和电机对拖台架,双向可编程直流电源为直流母线供电。利用该系统,实现永磁同步电机矢量控制算法,实验结果验证了RCP系统的准确性和有效性,且可缩短开发周期、降低研发成本,具有一定工程价值。
[1]高 瑾,黄 洋,宋石阳,等.车用电机硬件在环实时仿真与测试平台[J].电工技术学报,2014,29(11):99-106.
[2]Guo H,Zhou B,Li J,et al.Real-time simulation of BLDC-based wind turbine emulator using RT-LAB[A].International Conference on Electrical Machines and Systems,2009.ICEMS 2009 [C].IEEE,2009:1-6.
[3]卢子广,柴建云,王祥珩,等.电力驱动系统实时控制虚拟实验平台[J].中国电机工程学报,2003,23(4):119-123.
[4]Dufour C,Lapointe V,Bélanger J,et al.Hardware-in-the-loop closed-loop experiments with an FPGA-based permanent magnet synchronous motor drive system and a rapidly prototyped controller [C]//Industrial Electronics,2008.ISIE 2008.IEEE International Symposium on.IEEE,2008:2152-2158.
[5]简嘉亮,肖 兵.交流永磁同步电机控制器的设计与实现[J].计算机测量与控制,2007,15(7):899-901.
[6]宋 强,王再宙,王志福,等.基于虚拟仪器的电动汽车牵引电机性能测试系统[J].仪器仪表学报,2007,28(11):2019-2023.
[7]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
[8]杨 凯,李 辉,郭东山,等.基于dSPACE的PMSM控制器快速开发平台设计与实现[J].微电机,2015,48(4):75-79.
Design of Rapid Control Prototyping of Permanent Magnet Synchronous Motor Based on PXI and RT-LAB
Zhu Pengcheng,Qiu Huajing,Ma Haitao,Li Hongbiao
(Shanghai Keliang Information Tech.&Eng.Co.,Ltd.,Shanghai 200233,China)
To solve the problems of permanent magnet synchronous motor controller such as complex algorithm、large amount of code、long development cycle,this papaer puts forward a permanent magnet synchronous motor rapid control prototype system based on virtual instrument.Design the rapid control prototype hardware platform,and select the hardware device,which are PXI virtual instrument、power drive module、the motor test bench.Research on permanent magnet synchronous motor rotor field oriented control theory,with a 3.1 k W motor to be tested as the controlled object,in RT-LAB real-time simulation software environment,set up permanent magnet synchronous motor control algorithm model.The experimental results show that the rotor speed and stator current can be no deviation to track the reference set value,system control performance is good,and the system makes the motor controller to shorten the development cycle,lower cost.
rapid control prototyping;virtual instrument;permanent magnet synchronous motor;
1671-4598(2016)08-0093-04
10.16526/j.cnki.11-4762/tp.2016.08.025
:TP273
:A
2016-05-23;
:2016-06-21。
朱鹏程(1989-),男,江苏南通人,硕士,工程师,主要从事电机驱动控制方向的研究。
