小型集成三通道机抖激光陀螺数字式控制电路设计
2017-01-13刘秀娟12王浩12钟颖12齐建宇12
刘秀娟12王 浩12钟 颖12齐建宇12
(1.宇航智能控制技术国家级重点实验室,北京 100854;2.北京航天自动控制研究所,北京 100854)
小型集成三通道机抖激光陀螺数字式控制电路设计
刘秀娟1,2,王 浩1,2,钟 颖1,2,齐建宇1,2
(1.宇航智能控制技术国家级重点实验室,北京 100854;2.北京航天自动控制研究所,北京 100854)
针对军事和民用工程中亟待解决的捷联式机械抖动激光陀螺惯导的小型化、集成化和高精度问题,提出了一种以单块电路板实现对3个机械抖动激光陀螺进行数字式稳频控制、抖动控制、稳流控制、信号检测及脉冲计数的全功能小型机抖激光陀螺集成控制方案,设计了以DSP和FPGA为核心控制器的陀螺电路;试验结果表明,该集成控制电路能同时实现3路陀螺的自动控制,参数调整灵活方便,控制精确稳定,在实现小型化集成化的同时,提高了激光陀螺的输出精度,为捷联式机械抖动激光陀螺惯导的小型化、集成化和高精度奠定了基础,已在多个项目中获得工程应用,具有较高实用价值。
激光陀螺;数字化;集成化;控制电路
0 引言
激光陀螺控制电路实现抖动控制、稳频、稳流和信号检测功能,对激光陀螺的精度、稳定度和可靠性有很大影响。传统陀螺控制电路多采用模拟电路和数字集成电路实现,元器件多、控制算法和参数调整不方便,三个陀螺往往需要多块电路板来控制,不利于激光陀螺捷联惯导的小型化和精度提高。空天导航、水下导航、陆地导航等应用背景对激光惯导的体积和性能的要求日益提高,因此激光陀螺电路的小型化、集成化和数字化问题亟待解决。
有文献实现了四频差动激光陀螺的稳流、稳频及计数等电路的数字一体化[1],有文献对数字抖动控制、陀螺输出信号的采集和滤波、陀螺数字稳频等电路问题进行了阐述[2-6],但是仍然未能解决能实现多个陀螺的抖动、稳流、稳频、计数等全功能的一体化电路设计问题。针对这一需求,本文提出了一种以单块电路板实现对3个机抖激光陀螺进行数字式稳频控制、抖动控制、稳流控制、信号检测及脉冲计数的全功能小型机抖激光陀螺集成控制方案,并以DSP和FPGA为核心,实现了一体化集成多通道陀螺控制电路,对激光陀螺捷联惯导的小型化和精度提高非常有利,具有重要的军事和民用价值。
1 技术方案
机械抖动激光陀螺具有动态范围大、比例因子稳定、启动迅速、抗干扰能力强、可靠性高等优点,是目前捷联式惯性导航系统中应用最为广泛的理想器件[6]。机抖激光陀螺由光学系统和电路系统组成,电路系统主要完成陀螺的抖动控制、腔长控制(稳频)、稳流控制(恒流源)和信号检测等功能,对陀螺的精度、稳定度和可靠性有很大影响,改进陀螺电路可以有效提高激光陀螺性能。
1.1 概述
本文提出一种三通道机抖激光陀螺数字式一体化控制电路,包括恒流源电路、信号检测电路、抖动控制电路和腔长控制电路(稳频电路)4部分,四部分电路相互配合,并行工作。抖动控制电路和腔长控制电路主要由以DSP和FPGA为核心的CPU电路和相关预处理和后处理电路配合实现,恒流源电路以模拟方式实现,信号检测电路以数字和模拟混合的方式实现。本电路可对3个激光陀螺进行控制,输出一定导航周期内的陀螺计数值,可直接提供给导航、制导解算电路,实现系统的小型化和集成化。一体化控制电路组成和功能如图1所示。
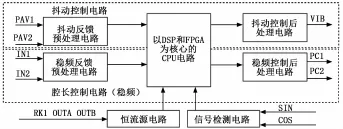
图1 陀螺一体化控制电路框图
其中:DSP采用TI公司的TMS320C6713B浮点处理器,其主频可达200 MHz,浮点运算速度可达1.8 GFLO/S,运算速度快,控制精确且便于进行软件开发,易于更改控制参数,是嵌入式系统设计中的主流处理器。
1.2 抖动控制电路
抖动控制技术是机械抖动激光陀螺最核心的控制技术之一。机抖激光陀螺采用机械抖动偏置来克服激光陀螺敏感信号的闭锁(死区)问题,在陀螺上安装抖动机构,抖动控制电路提供的抖动控制信号激励抖动机构不停摆动。同时在陀螺上还装有角速度传感器,输出敏感摆动的角速度信号,作为抖动控制电路的反馈信号,形成闭环抖动控制。本方案利用抖动机构的频率特性和回路自激振荡的特点,能自动找到抖动机构的频率谐振点,并稳定抖动幅度;同时,在门槛电压不变的情况下,抖动机构所需要的外界能量最小。为减小动态锁区误差,需要为抖动控制信号注入随机噪声,随机噪声信号由软件生成并由DSP控制输出。抖动控制部分信号回路如图2所示。
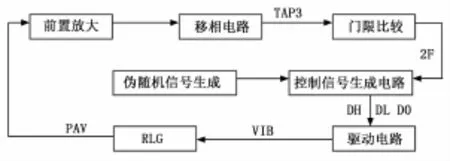
图2 抖动控制信号回路
如图2,机抖激光陀螺的抖动反馈信号PAV的幅度和陀螺抖动轮的抖动角速度成正比,为正弦波,经前置放大、移相后,得到正弦波TPA3,此信号和陀螺抖动轮的抖动角度成正比。将TPA3经过过零门限比较后得到方波2F,2F信号进入由FPGA和DSP构成的伪随机信号生成和抖动控制信号生成部分后,产生电压开关信号DH、DL和D0,DH和DL分别用于控制抖动控制信号VIB高低电压的通断,D0用于控制VIB信号的回零。
如何产生用于抖动控制的电压开关信号DH、DL和D0以及如何生成伪随机信号以实现噪声注入是问题的关键。本方案采用在FPGA中设计实现的计数器和多路选择器以及DSP的中断(中断源为3个陀螺的抖动反馈经放大、移相后的信号2F)及软件(伪随机信号生成、抖动中断处理)相配合的方法来实现VIB信号能在TPA3过零(PAV信号最大,即抖动角速度最大)的时刻给出抖动激励,2F信号和PAV信号频率相同,从而可以保证VIB能严格跟踪陀螺自身抖动的抖动频率,并能使驱动需要的能量最小。根据DSP产生的伪随机序列,VIB信号宽度能随机调节,从而实现随机噪声的注入。FPGA配合DSP的抖动控制原理框图见图3。
抖动控制电路处于初始状态时,陀螺不抖动,为使陀螺起抖,需要给出一个初始激励。起抖的实现过程如下:计数器3工作,输出400 Hz方波;多路选择器MUX1~MUX3选通计数器3的输出,从而对陀螺进行初始推动,使陀螺开始抖动。
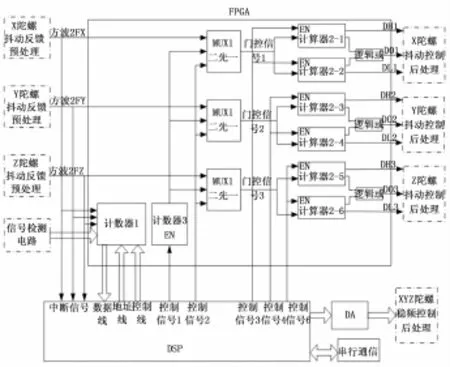
图3 抖动控制原理
陀螺开始抖动后,产生2F信号,DSP响应中断后使计数器3不使能,同时使MUX1~MUX3选通3路2F信号。至此,起抖过程结束。陀螺起抖后,每个2F信号的上升沿会触发一次CPU中断,在中断服务程序中,DSP控制计数器2-1 ~2-6,输出一定宽度的单稳态脉冲信号,控制驱动电路对陀螺进行推动,从而严格跟踪各陀螺的抖动频率,并稳定陀螺抖动幅度。
为克服动态闭锁,需要实现随机噪声的注入,由伪随机信号生成电路实现,这部分由DSP软件控制输出伪随机序列,并根据伪随机序列值控制单稳态脉冲信号的宽度:在伪随机序列为“0”时,输出较窄的脉冲;在伪随机序列为“1”时,输出较宽的脉冲,即随机“大抖——小抖”控制。
随机“大抖——小抖”抖动驱动宽度(即上述较窄脉冲、较宽脉冲的脉冲宽度)的确定方法如下:先给定一定的大抖抖动驱动宽度(比如20μs)激励抖动轮开始抖动,小抖驱动宽度取大抖宽度的1/4或1/8,同时监测PAV信号的幅度;按一定步长(比如10μs)增加大抖驱动宽度,并观测PAV信号的幅度:起初,PAV信号的幅度随着抖动驱动宽度的增加而增加;抖动驱动宽度的增加到一定程度以后,PAV信号的幅度变化不明显,此时的抖动驱动宽度即可作为该陀螺抖动驱动宽度的经验参考值。
对于陀螺的抖动周期,大抖宽度一般不超过占空比的25%。初始大抖宽度、步长以及小抖和大抖的宽度比例可依据实际需要灵活确定。
1.3 腔长控制电路
基于关联规则的智能药柜内药品储位设置研究…………………………………………………… 沈颖燕等(23):3285
腔长控制电路即稳频电路,稳频电路主要依靠A/D转换器、D/A转换器和固化在DSP中的稳频控制单元来实现。陀螺的稳频反馈信号(IN1、IN2)经稳频反馈预处理电路后送CPU电路的A/D输入端,经A/D转换后送稳频控制单元。稳频控制单元根据A/D输入,按照稳频算法,输出稳频控制信号送至D/A转换器,D/A的输出经稳频反馈后处理电路放大后送至激光陀螺,作为稳频控制信号(PC1、PC2)。
稳频算法的控制过程分为模态搜索和正常稳频两个阶段。
1)模态搜索:DSP通过D/A转换器经放大后以一定的步长从0到一定电压(比如300V,视陀螺型号而定)给陀螺的稳频控制端施加线性激励,一定时间后,通过A/D采集陀螺的响应信号。在某些激励条件下,陀螺的反馈信号将出现峰值,此时的激励称为陀螺的“模”。通过一轮搜索,可以确定陀螺的初始模态,这个过程称为“模态搜索”。
2)正常稳频:稳频控制单元搜索并记录“模”后,控制D/A经放大电路输出稳频控制信号(一般取多个模中电压值位于中间位置的模)。此后,稳频控制单元定时(定时周期T/8)采集A/D转换器的输出并控制D/A输出稳频控制信号。受外界干扰因素的影响,激光谐振频率将有发生漂移的趋势,从而引起一定的模态漂移,稳频电路的目的则是抑制这种漂移,使得陀螺输出的光强信号稳定在最大值。稳频电路根据A/D采集到的光强反馈信号强度确定输出的三态周期调制电压的幅值,从而达到稳定腔长的目的。
本方案利用小抖动直流稳频原理来实现腔长稳定,过程为:在激光陀螺的压电陶瓷上加一个如图4所示的三态周期调制电压;开启激光陀螺后,激光谐振频率就是初始直流电压所对应的频率;在外围稳频电路的作用下,激光谐振频率将很快达到激光光强峰值所对应的频率处;此后,激光谐振频率受外界干扰因素的影响将有发生漂移的趋势,但稳频电路会抑制这种频率漂移。通过加三态周期调节电压信号,稳频电路能很好的探测出不同位置处(指施加的三态周期调节电压中的施加V0-Vm处和V0+Vm处,其实也就是不同时间点上的)光强偏差信号Vm。稳频电路只要根据此光强偏差信号Vm去修正加到压电陶瓷上的电压,调整激光谐振腔体长度,即可达到稳频的目的。
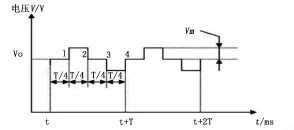
图4 稳频三态调制电压
1.4 恒流源电路
恒流源电路为陀螺提供工作电流,并使陀螺双臂放电电流保持稳定状态。恒流源电路包括电压调节器和稳流电路,功能是给定陀螺阳极工作电流,并且在高压启动后,使陀螺阳极工作电流保持稳定。电压调节器用陀螺输出的基准电压信号(即RK1信号)作基准源进行调节,输出的稳定电压控制稳流电路输出电流的大小。电压调节器由两个分压电阻构成,将陀螺RK1信号分压到原来的1/6左右。稳流电路的原理见图5,每个陀螺需要两路稳流电路。它利用电压来控制电流的变化,主要包括基准电源VREF(即RK1经电压调节器分压后的信号)、输入控制电压Vi(即陀螺稳流反馈信号OUTA或OUTB,分别对应两路的输入)、运算放大器IC、场效应管M1和基准电阻R组成。在稳流电路中,场效应管M1工作在恒流区,能保证输出电流稳定在一定的水平。-1 500 V电源接陀螺阴极,并与稳流电路的电源共地,而陀螺的阳极接到稳流电路输出Io,这样就保证-1 500 V提供陀螺的工作电流是经过稳流电路的稳定电流,而且可调。
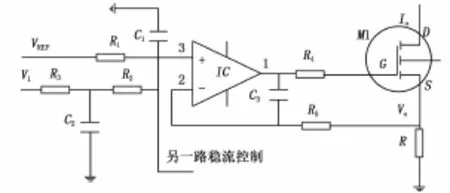
图5 恒流源原理图
1.5 信号检测电路
信号检测电路把陀螺输出的正交信号(sin信号和cos信号)进行整形、鉴相,输出脉冲信号,并实现对脉冲的计数和滤波。信号检测电路包括:整形电路、鉴相电路和输出电路。原理框图见图6。整形电路把正交信号(sin信号和cos信号)经过零比较器后变成方波脉冲。鉴相电路和输出电路用FPGA实现,逻辑功能为:在sin信号方波上升沿且cos信号方波为高电平时正向通道输出脉冲,在sin信号方波下降沿且cos信号方波为低电平时负向通道输出脉冲信号。输出的正负通道脉冲信号经16位循环递减计数器(即图3中的计数器1)计数后可用于导航计算。该计数器1可以用2F信号作为锁存信号,也可以使用DSP内部定时器的输出作为锁存信号,视使用场合而定,硬件上把2F引入。计数器1计数输出的结果送DSP读取。
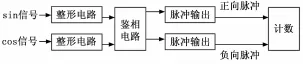
图6 信号检测电图框图
2 试验结果及分析
将电路板插入某型捷联式激光陀螺惯导机箱中,连接3个90型机械抖动激光陀螺(编号分别为15001、15002、15003)进行了综合性能测试。3个陀螺部分出厂标称指标如表1所示。
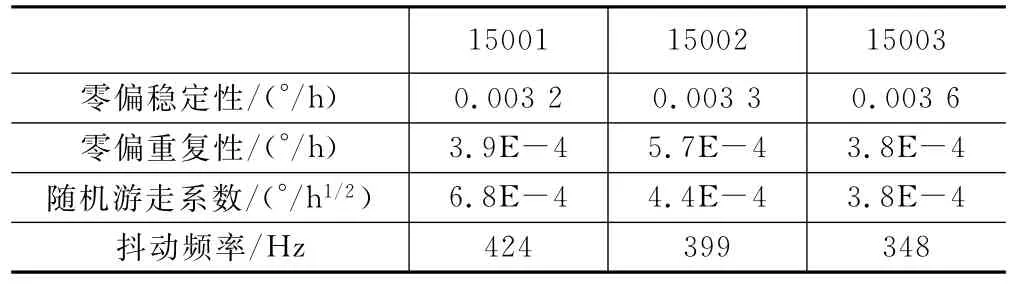
表1 陀螺出厂指标(部分)
将装有三通道机抖激光陀螺数字式一体化控制电路的捷联惯导置于三轴转台上,按照GJB2427-95(激光陀螺仪测试方法)[7]静态测试1小时,每0.1 s记录一次陀螺脉冲数据,重复试验6次,每次试验之间间隔不小于4小时。同样按照GJB2427-95对测试数据进行计算,结果如表2。其中,每次试验的零偏稳定性、随机游走系数先按军标公式计算,然后取6次试验的均值;零偏重复性为直接按照军标计算的值。
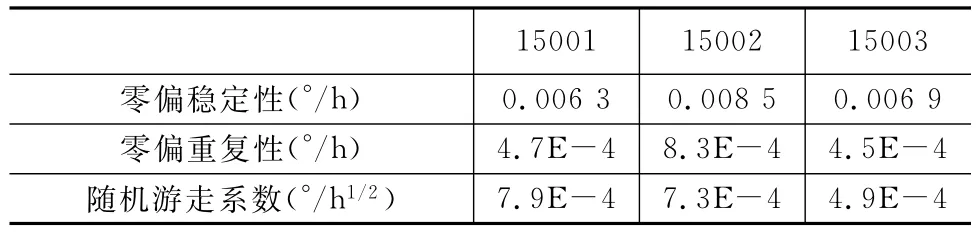
表2 陀螺实测指标
从试验结果看,用三通道机抖激光陀螺数字式一体化控制电路对陀螺测试的结果比陀螺出厂指标要差一些,但是接近于出厂指标,这是由于3个方向的陀螺抖动交联影响造成的。
为了验证这一点,将15002、15003陀螺与电路断开(但不从本体上拆下),只对15001陀螺进行测试,测试条件保持一致,测得零偏稳定性为0.004 1°/h,零偏重复性为4.9E-4°/h,随机游走系数为8.5°/h1/2,均与出厂指标基本一致。由此可以看出,陀螺装入惯导系统以后,由于3个方向的交联耦合影响,陀螺单表的测试性能要差一些。但采用三通道机抖激光陀螺数字式一体化控制电路以后,对相同陀螺测试的精度比以往采用模拟电路要提高1倍以上。
当然,数字式稳频的稳频参数和抖动控制参数对测试结果也有非常大的影响。以15001陀螺单独测试为例,采用稳频周期T=8 ms、随机“大抖——小抖”噪声注入模式、大抖时间100μs、小抖时间50μs时,零偏稳定性为0.004 1°/h;如果采用稳频周期为16 ms、随机“大抖——小抖”噪声注入模式、大抖时间200μs、小抖时间100μs时,那么零偏稳定性则为0.008 9°/h,差异非常大。因此,选用合适的控制参数很重要。在工程应用中,要为陀螺设定合适的控制参数。
3 结论
在空天导航、水下导航、陆地导航等应用中,捷联式激光陀螺惯导的应用日益广泛,随之而来的小型化、高精度需求也日益凸显。本文提出的以单块电路板实现对3个机械抖动激光陀螺进行数字式稳频控制、抖动控制、稳流控制、信号检测及脉冲计数的全功能小型机抖激光陀螺集成控制电路,参数调整灵活方便,控制精确稳定,很好地解决了陀螺控制电路小型化、集成化、高精度的问题,为捷联激光惯导的小型化高精度创造了条件,具有较高实用价值。
[1]王国臣.陀螺电路的数字一体化及其实现[J].中国惯性技术学报,2009,17(3):370-373.
[2]杨 阳,李锦明,程 龙,等.激光陀螺抖动控制电路高精度数字化设计[J].计算机测量与控制,2015,23(1):237-239.
[3]周 琪.一种激光陀螺惯导仪表信号采集电路设计[J].电光与控制,2015,22(3):72-76.
[4]刘小虎.激光陀螺自适应腔长控制系统[D].长沙:国防科学技术大学,2012.
[5]张永瑞,李锦明,苏树清.基于FPGA和DSP的激光陀螺信号处理电路设计[J].中国测试,2014,40(2):110-113.
[6]温 锋,李锦明,杨 阳,等.一种新型高效的激光陀螺抖动信号剥除技术研究与实现[J].计算机测量与控制,2014,20(1):207-209.
[7]GJB 2427-95.激光陀螺仪测试方法 [S].国防科学技术工业委员会,1995.
A Miniaturized Integrated Three-channel Control Circuit for Mechanically Dithered Laser Gyros
Liu Xiujuan1,2,Wang Hao1,2,Zhong Ying1,2,Qi Jianyu1,2
(1.State Key Laboratory of Science and Technology on Aerospace Intelligence Control,Beijing 100854,China;2.Beijing Aerospace Automatic Control Institute,Beijing 100854,China)
The problem of miniaturization,integration and high accuracy of the laser gyro strapdown inertial navigation system is badly to be solved in military and civil engineering.Aiming at solving this problem,a miniaturized integrated control scheme for three mechanically dithered laser gyros is presented to achieve the function of dither control,cavity length control,stable current control,signal detection and pulse counting with one single circuit board,which is designed and implemented based on DSP and FPGA.Experimental results show that the proposed miniaturized integrated control circuit board can accomplish the automatic concurrent control of three gyros both precisely and stably with the advantage of flexible and convenient parameter adjustment.The proposed miniaturized integrated control circuit can improve the precision of the gyros,which lays the foundation for the high precision and miniaturization of the laser gyro strapdown inertial navigation system.It has been applied in many projects and has high practical value.
laser gyro;digitization;integration;control curcuit
1671-4598(2016)08-0086-04
10.16526/j.cnki.11-4762/tp.2016.08.023
:TP311
:A
2016-02-21;
:2016-03-08。
刘秀娟(1980-),女,河南郑州人,硕士,高级工程师,主要从事惯性导航、组合导航方向的研究。
