基于复合控制的塔式太阳能跟踪控制装置设计
2017-01-12甘屹曲凤挺郭家忠王子健曾乐才
甘屹+曲凤挺+郭家忠+王子健+曾乐才

摘 要: 针对塔式太阳能热发电站中定日镜跟踪装置的跟踪精度不高、构建成本较大等问题,提出采用将遗传算法的选择机制与吸热塔能量变化的反馈机制相结合的方式对光热电站的太阳能跟踪控制系统进行改进.在光热电站的少数几台定日镜上配备光电检测元件,并以其控制角度为基准控制其他定日镜的角度调整.采用DSP(digital signal processing)为控制核心,完成了跟踪控制器的通讯框架及控制系统的硬件电路设计.实验表明,该方案在保证光热电站整体控制精度的基础上,减少了光电检测元件安装数量和电站构建成本,并保证了视日轨迹跟踪控制时的自动调整能力.
关键词: 塔式太阳能发电; 定日镜; 遗传算法; 控制系统结构; 电路设计
中图分类号: TP 27文献标志码: A
文章编号: 1008-8857(2016)03-0125-06
Abstract: With the problems of low tracking accuracy and high construction cost of the heliostat tracker in the solar thermal power tower,the combination of the selection mechanism of genetic algorithm and the feedback mechanism of energy changes in the heat absorption tower was proposed to improve the tracking controller.Optoelectronic sensors were equipped in a few of heliostats.Based on these heliostat control angles,the angles of the other heliostats were adjusted.The communication framework and the circuit of tracking controller were designed using DSP as the control core.Experimental results showed that the proposed solar tracking controller could reduce the number of optoelectronic sensor and the construction cost of solar thermal power plant without reducing the overall control precision of the solar thermal power tower.At the same time,the control system had the ability of automatic adjustment when its tracking control depended on the trajectory of the sun.
Keywords: solar power tower; heliostat; genetic algorithm; structure of control system; circuit design
在光热发电领域中采用太阳能跟踪控制方式是提高定日镜接收率的最有效途径之一[1].目前采用的太阳能跟踪控制有多种控制方式,如气动式、压差式、电控式等[2].在如何提高单个定日镜跟踪精度方面已取得很多成果[3],但是对于大规模光热电站中数目众多的定日镜的整体控制还没有成熟的方案[4].若仅采用光电检测式跟踪控制,虽然具有较高的精度,但高昂的成本使其离商业化运行还有差距[5];而属于开环控制的视日轨迹跟踪控制虽然有着很好的跟踪稳定性[6],但其缺乏自动调整能力[7],使得其整体跟踪精度不高,导致太阳能的整体利用率较低.
为了不增加定日镜数目并保证光热电站定日镜的整体控制精度,采用遗传算法对太阳能跟踪控制策略进行改进.文献[8-9]基于单片机技术,研究了满足复合控制功能要求的太阳能跟踪控制装置.在此基础上,本文对控制系统的结构进行了优化设计,并完成了高精度控制器的硬件电路设计.在保证光热电站整体发电效率的同时,大大减少了光电检测元件的安装数量,使复合控制与大规模光热电站定日镜跟踪控制能更好地结合.
1 控制系统结构设计
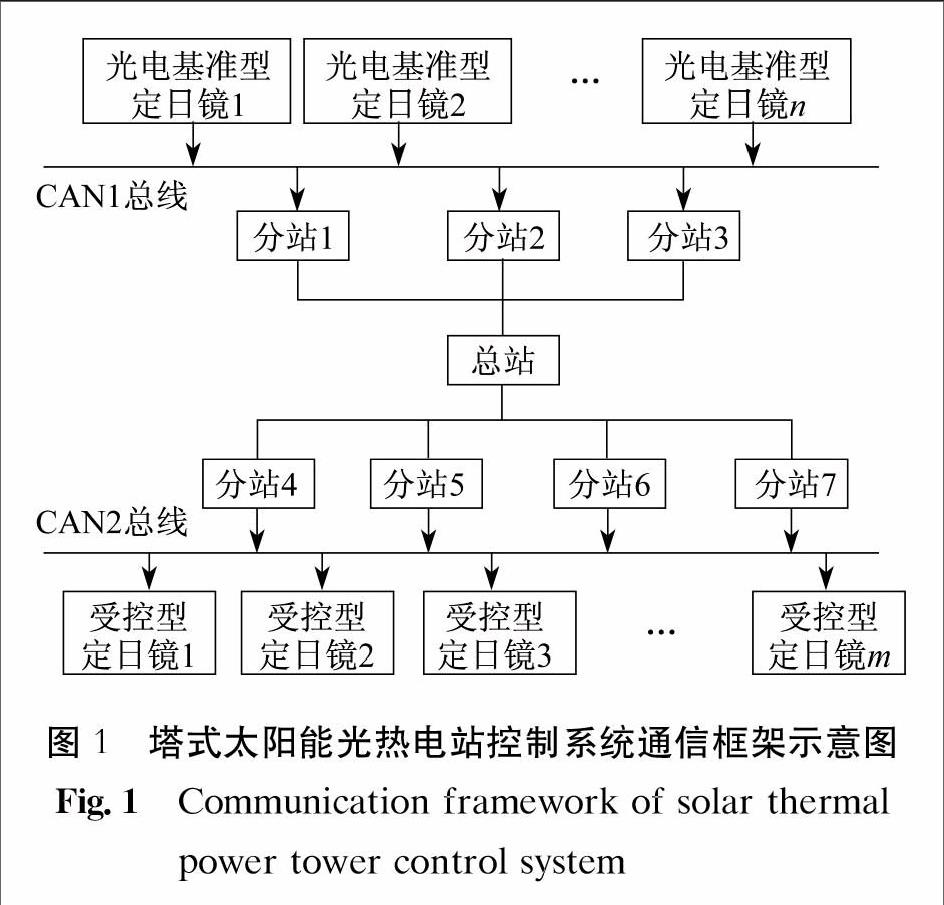
本文采用基于遗传算法改进的复合控制方案[10].光热电站中设置光电基准型和受控型两种类型定日镜.光电基准型定日镜通过光电检测跟踪和视日轨迹跟踪确定定日镜最佳接收角度,受控型定日镜根据光电基准型定日镜的最佳角度形成域值范围,并在此范围内采用遗传算法进行调整.光热电站中光热基准型定日镜数量记为n,受控型定日镜数量记为m.在控制系统的通信框架中,以n台光电基准型定日镜为主站,在分站1、2、3内设置多台PC机从站,光电基准型定日镜与分站通信方式为多主对多从,采用CAN总线的通信模式完成数据交换.分站1、2、3负责将光电基准型定日镜调整的最佳角度实时传递给总站,总站根据光电基准型定日镜最佳角度形成的域值并经遗传算法运算形成随机角度,并将其传递给分站4、5、6、7,分站再将角度分配给每一个受控型定日镜.控制系统的通信框架图如图1所示.
2 光电基准型定日镜控制器电路框架设计
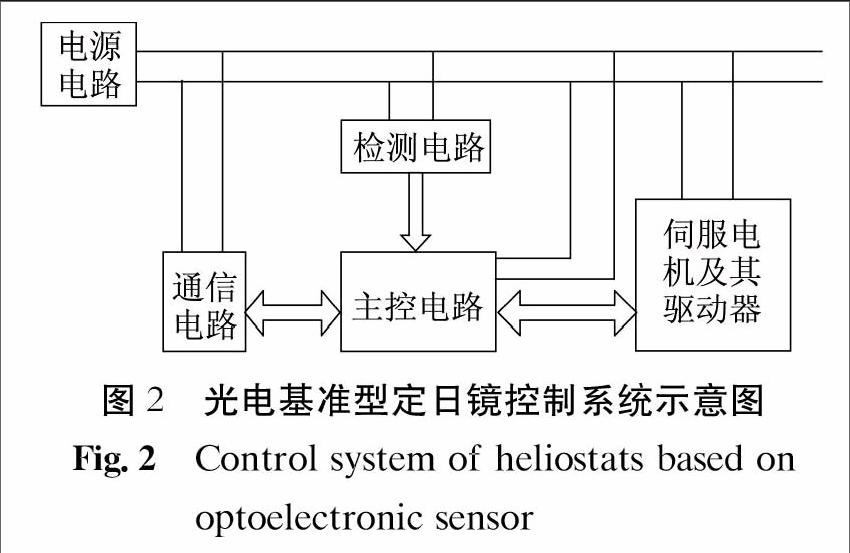
光电基准型定日镜控制系统主要包括5个模块:电源电路、检测电路、主控电路、通信电路、伺服电机及其驱动器.电源电路主要为系统提供稳定的工作电压.检测电路中配备有四象限光电检测装置及信号处理电路,通过四象限光强变化采集太阳方位信息,并将其转化为电信号传递给主控电路.主控电路是整个控制系统的核心模块,负责计算太阳方位、接收采集信息、控制伺服电机运转等重要功能,主要由DSP控制电路、AD采样电路、PWM输出电路、复位电路、JTAG电路、时钟电路、EEPROM构成.通信电路负责PC机与光电检测元件的数据传递,本文采用CAN总线通信电路和RS232串口通信电路.采用直流无刷伺服电机及其配套的直流伺服驱动器.光电基准型定日镜控制系统示意图如图2所示.
3 电源电路设计概要
硬件电路系统均需电源电路.在光电基准型定日镜跟踪控制系统电路中,各模块所需的额定电压不同,对电压稳定性的要求也不同.因此,需要针对特定的模块设计相应的电源电路.
3.1 开关电源选型220 V24 V
系统采用供电电压为24 V的直流电.考虑到各个模块工作时额定功率、电压、电流等的要求,尤其要保证伺服电机能够正常驱动,本文选择型号为YXW24 V10 A240 W的220 V24 V、AC转DC开关电源,其各项参数满足硬件系统的性能要求.
3.2 24 V电源抗干扰电路
为保证硬件系统正常工作,需要电源电压工作稳定,并具有较强的抗干扰能力.因此,需对电源电压进行滤波、稳压处理,据此在抗干扰电路设计中增加防反接二极管、稳压二极管稳定电压,增加双向共模电感,以消除共模电磁干扰,增加电容起到滤波作用.
3.3 24 V10 V DCDC降压电路设计
本文选择以LM5008A型降压开关稳压芯片为核心处理单元来设计24 V10 V DCDC降压开关稳压器.该方案可确保短路控制,同时提供最低的折返,具有热关断、VCC欠压锁定、栅极驱动欠压锁定、最大占空比限制器和预充电开关等功能.
3.4 5 V、3.3 V、1.8 V电压电路设计
根据不同电路对电压的要求,可在获得10 V电压后经芯片进行转换.TLV70450DBV、TLV70436DBV芯片可以将10 V电压转换为5 V和3.3 V电压,而1.8 V电压可由5 V电压通过TI公司的PS767D301芯片进行转换.
4 检测电路设计
检测电路系统共有5个模块:四象限传感器模块、信号放大电路模块、精密有源绝对值电路模块、比较电路模块、有源滤波电路模块.其工作原理为四象限传感器模块将光信号转化为电信号,再通过信号放大模块将电压信号进行差动放大及去干扰,精密有源绝对值电路负责获取电信号的大小,比较电路模块则用来判断电压方向,最后通过有源滤波电路模块传给主控单元.
4.1 四象限传感器模块
光电检测四象限法中采用的核心元件为四象限光电传感器[11],其原理为利用各象限光照不均产生压差来工作.四象限检测法就是将光电检测区域分为四部分,将四象限传感器安放其中,并根据传感器中的电流大小和方向判断各象限接收到的光照情况,从而做出相应的调整.
当太阳垂直对准定日镜时,太阳入射光斑位于光电检测元件的正中心,这样四个象限内光照一致,不会产生电压差.当太阳入射方向发生偏移时,入射光斑在四个象限中的位置会产生偏移,四象限因光照不均产生电压差形成电流回路,经计算可得出当前定日镜与最佳方位偏离的角度,从而对定日镜的转角位置重新进行调整,使其达到与太阳光照方向垂直的效果.
4.2 信号放大电路设计
四象限光电传感器的电压差是因太阳光在各象限内光强不均产生的,由光强信号改变而引起的电压差不足以为主控芯片提供变化的电压信号,而且微弱的信号易受到外界信号的干扰,需要对其进行放大、抗干扰处理.双端输入、单端输出的差动放大电路具有共模抑制比高、不易受外界信号干扰等优点.信号放大电路的前级采用同向放大电路,通过电路的高阻抗特性放大输入信号的电压差,然后在后级使用差分放大器消除前级同向电路采入信号的共模偏差,增强电路的抗干扰能力.
信号放大电路如图3所示,其中R1=R3,R4=R5,R6=R7;U1为输入电压;U2为输出电压;输入信号的放大倍数Ud可由式(1)得出,即
4.3 精密有源绝对值电路设计
为方便DSP(digital signal processing)的信号处理,在AD采样电路中加入可将负电压转化为正电压,并保持外界电压信号大小的精密有源绝对值电路.其工作原理为:当输入电压U3>0时,运算放大器oc1的输入小于0,运算放大器oc2的输入大于0,二极管D2导通,D1两端施加了方向电压而被强制关断,oc2则为电压跟随器,输出电压U4=U3;当U3<0时,运算放大器oc1的输出大于0,运算放大器oc2的输出小于0,二极管D1导通,D2两端施加了反向电压而被关断,oc2作为反向电路,使得U4=-U3.精密有源绝对值电路原理图如图4所示.
4.4 比较电路设计
精密有源放大电路只能传递信号的大小,需经比较电路判断输入信号的方向.传感器信号经过差动放大电路后从比较电路的3脚输入.若输入信号大于0,则3脚电压低于2脚接地电压0 V,6脚输出高电平3.3 V;若输入信号小于0,3脚电压高于2脚接地电压0 V,6脚输出电压为低电平0 V.通过比较电路可知四象限传感器产生的电流方向,从而得出光信号更强的传感器象限的相关信息,进而推断出太阳方位的变化.比较电路原理图如图5所示.
4.5 有源滤波电路设计
滤波电路的设计就是求解出通带放大系数Aup、截止频率fp和过渡带的斜率.有缘滤波器与无源滤波器相比,无源滤波器是由电阻、电容组成的滤波器,其截止频率受负载的变化而变化,较不稳定.而有源滤波器是在无源滤波器后接电压跟随器,由于电压跟随器的输入电压无穷大,即可以将负载与无源滤波器隔离,使负载对滤波器截止频率无影响.有源滤波器只适用于信号的处理,不适合高电压、大电流负载.而无源滤波器常用于整流后的滤波,高电压、大电流的滤波常采用LC电路.本文中传感器的传递频率为10~15 Hz,属于低频,所以设计为低通滤波器(LPF).
5 主控电路设计
主控电路以DSP为核心处理芯片,设置相关外设组成核心电路板,主要由DSP控制芯片、AD采样电路、PWM输出电路、复位电路、JTAG程序下载电路、时钟电路、EEPROM电路模块组成.以DSP为控制核心的跟踪系统具有可靠性强、跟踪反应速度快、稳定性好等特点,为装置实时准确地跟踪太阳光提供了平台[12].
5.1 DSP选型
为满足硬件系统对数据快速、高效的处理要求,本文选择TMS320F2812型DSP作为主控电路的核心处理芯片[13].其最高时钟频率达150 MHz,运行速度快,且本身自带SRAM、flash等储存空间,可方便地进行在线仿真.此外,本型号DSP还配备诸多外设,包含3路SCI、1路SPI、2套EV时间处理器、2路8位的ADC、1路eCAN总线通道,功能齐全.
5.2 AD采样电路
TMS320F2812型DSP的A/D端口是GPIO多路复用的形式,共有16路12位的A/D转换器.A/D端口的输入电压控制在0~3.3 V.为保证实际输入电压在输入信号范围内,在A/D采样端口处必须设置保护电路[14].
5.3 PWM输出电路及程序下载接口电路
DSP采用PWM输出波形控制伺服电机的转动方向和速率.TMS320F2812型DSP有12路PWM脉冲输出端口.为保证输出波形的真实性,采用74HC245型锁存器进行PWM输出波形的保持,以防止传递出的PWM波形衰减[15].
DSP进行程序调试时,需经JTAG程序下载接口将仿真器与DSP连接,并将PC机上的程序下载到DSP中才能让DSP运行.
5.4 时钟电路设计及EEPROM电路模块
对定日镜进行时钟控制时,要保证时钟不受系统失效的影响,采取单独时钟芯片构成时钟模块最为安全.本文采用Intersil公司生产的ISL1208型时钟芯片.该时钟芯片具有低功耗、高精度等优点,在系统电源失效时,可以通过后备电源供电,提供可靠的时钟信息.
为防止在主控电路发生故障突然掉电时数据丢失,添加EEPROM电路模块.
6 通信电路
定日镜需要与分站进行通信,以完成数据交换.定日镜与分站进行数据交换时属于多主多从模式.本文用eCAN总线通信模式完成定日镜与分站的数据交换.在硬件电路系统设计中,采用两种通信方式:eCAN总线通信方式和RS232串口通信方式.eCAN总线通信方式主要用于定日镜与分站的数据交换;RS232串口通信方式用于调试时主控模块与PC机的数据交换.
6.1 eCAN总线通信电路
选用SN65HVD232芯片作为eCAN总线通信电路的设计芯片.该芯片的应用扩展性好,功能强大,若要增加节点个数,只需在CAN总线上挂载有CAN模块的控制器即可[16].
6.2 RS232串口通信电路
在进行DSP主控板的通信程序调试时,采用PC机与主控板串口调试方式更为方便.由于DSP采用的是TTL电平,与PC机的电平不一致,所以需要借助Max232完成TTL电平与PC机电平之间的转换.
7 伺服电机及其驱动器选择
为满足定日镜调整特性,采用直流无刷伺服电机作为驱动电机,通过模糊PID控制对电机系统进行闭环控制调整,减小其误差,使其能达到定日镜转角精度的要求.主控电路根据所要调整的位置及伺服电机反馈情况向控制器提供相应PWM脉冲来调整定日镜转动.
因为定日镜需要根据太阳方位的变化进行实时调整,所以要求所采用的电机具有频繁启动、快速响应等特性.根据定日镜支架结构、重量、所需驱动转矩等实际情况,选择雷赛公司的DCM 50205型永磁直流无刷电机作为定日镜转动的驱动电机.根据DCM50205型直流电机特性,选择DCS810数字直流电机控制器作为该系统的伺服电机驱动器.
8 结 论
本文提出了基于遗传算法改进的复合控制方案,设计了太阳能光热电站控制系统的总体结构,采用以CAN总线协议为基础通讯协议的总站、分站相结合的结构模式.这种模式既减轻了总站控制多台定日镜的负担,又方便每台定日镜各项参数的实时采集和存储.设计完成了光电基准型定日镜跟踪控制装置的硬件电路,包括电源电路、检测电路、主控电路、通信电路和伺服电机及其驱动器模块.本方案在保证光热电站整体控制精度的基础上,减少了光电检测元件的安装数量,降低了电站的构建成本.本研究将促进太阳能光热发电的发展.
参考文献:
[1] 高林,谭伟.基于遗传算法的最大功率点跟踪[J].控制工程,2012,19(4):570-573.
[2] CAMACHO E F,RUBIO F R,BERENGUEL M,et al.A survey on control schemes for distributed solar collector fields.Part I:Modeling and basic control approaches [J].Solar Energy,2007,81(10):1240-1251.
[3] 郭铁铮,刘德有,钱艳平,等.基于DSP的定日镜跟踪控制系统研究[J].太阳能学报,2010,31(1):5-11.
[4] MILLS D.Advances in solar thermal electricity technology [J].Solar Energy,2004(76):19-31.
[5] DORATOP,KNUDSEN H K.Periodic optimization with applications to solar energy control[J].Automatica,1979,15(6):673-676.
[6] 王孝红,刘化果.塔式太阳能定日镜控制系统综述[J].济南大学学报:自然科学报,2010,24(3):302-307.
[7] 李敏强,徐博艺,寇纪淞.遗传算法与神经网络的结合[J].系统工程理论与实践,1999,19(2):65-69.
[8] 甘屹,王子健,曾乐才,等.基于89C51单片机的太阳能跟踪控制装置设计[J].能源研究与信息,2013,29(3):173-178.
[9] 甘屹,郭家忠,王子健,等.基于遗传算法改进的太阳能跟踪控制[J].控制工程,2015,22(1):157-163.
[10] 韩宇龙,於正强,赵安璞,等.基于垂直双轴结构太阳能光电跟踪系统研究[J].半导体技术,2010,35(11):1122-1125.
[11] 郭铁铮,刘德有,钱艳平,等.塔式太阳能热发电站中的定日镜跟踪装置研制[J].中国电机工程学报,2008,28(35):114-119.
[12] SCK J P,ROEB M,SATTLER C,et al.Development of a system model for a hydrogen production process on a solar tower[J].Solar Energy,2012,86(1):99-111.
[13] 王晓远,宋鹏,田亮,等.基于DSP的盘式无铁心永磁同步电动机调速系统[J].中国电机工程学报,2006,26(17):138-142.
[14] 胡庆波,吕征宇.一种新颖的基于空间矢量PWM的死区补偿方法[J].中国电机工程学报,2005,25(3):13-17.
[15] 黄钉劲,费韩,吕宏.基于CAN总线的太阳能控制器设计[J].电子测量技术,2010,33(7):92-95.
