激光验潮仪的研制及数据算法
2017-01-12杨习成边志刚肖鸿飞
杨习成,边志刚,肖鸿飞
(天津海事测绘中心,天津 300222)
激光验潮仪的研制及数据算法
杨习成,边志刚,肖鸿飞
(天津海事测绘中心,天津 300222)
基于单片机技术,通过解释、分析液位传感器的工作原理和激光传感器的测距原理,通过自主设计的激光传感器和相关设计软件,实现对所采集数据的精确计算,提出合理的硬件设计结构和软件编写,研制一种新型的验潮仪。
激光测距传感器;数字滤波技术;海水潮位
引 言
目前,潮位数据的采集主要是依托分布在沿海各主要港口和岛礁上的验潮站所配置验潮仪实现的,将采集数据定时按要求通过通讯网络回传到后方监控中心的数据存储服务器,登录水文管理软件即可对接收到的数据实施整合、管理、开发和利用。寻找一种新型的传感器配合研发的采集设备组成的验潮仪,对采集的数据定义新的算法,从而得到精确潮位。设计的传感器便于收放,潮位数据采集稳定、精确度高,是该验潮仪研发的主要特点。
1 常规液位传感器
当下被广为使用的的液位传感器主要有压力式、浮子式、超声波式和雷达式。
1.1 压力传感器
其原理是将传感器置于液体中,通过传感器测得液体涨落变化所产生的压力变化得到液位的数值变化,此种传感器安装较简单,缺点是传感器的金属压力感应片会因长时间使用产生“疲劳”造成采集精度下降。
1.2 浮子传感器
传感器的浮子漂浮在液面上,通过钢丝连接到转盘,浮子随液面的上下变化带动转盘的转动角度对应变化,从而得到液位变化状态,浮子传感器安装较复杂,长期使用会因钢丝与转盘产生细小滑动导致测量精度下降。
1.3 超声波传感器
通过安装在液面上方的传感器发射超声波,该波投射到液面反射后被接收,得到传感器与液面之间的距离,超声波是20 K以上的超声频率(通常是40 K),它的测距公式是S=VT/2(S是传感器到液面的距离、V是声速:340 m/s、T为时间)。由于超声波在空气中传播衰减较大,测距受限通常在3 m左右,不太满足海水潮差的变化,海水潮位检测基本不适用。
1.4 雷达测距传感器
其采集数据的数学公式是S=CT/2(C为光速,即电磁波的传播速度),雷达波发射时有一定发射角度,通常为3°,缺点是监测较长距离时精度会有所下降,优点是传感器的安装较为便捷。
2 激光传感器工作原理
激光发射频率高于雷达的发射频率,其传播基本没有散射,如若应用到海水潮位监测,所需的验潮井直径可以做到非常小,这对海水的涌浪干扰又极好滤除作用。激光测距传感器原理是由一组激光发射和接收头组成,由发射头发射一组已编码调制的激光束,投射到被测物反射后由接收头接收,译码处理后得到被测物的距离,从而完成整个测距过程。它具有设备小巧,安装方便,采集精度高,稳定性强,长期使用维护工作少等优点。
3 激光验潮仪特点
激光验潮仪是取激光测距传感器的优点而研制的一种新型的验潮设备,它通过编辑数据算法对所采数据处理,得到准确的潮位数据。其结构是将所有的硬件电路安装在一密封的机箱内,通过密封的航空插头连接到验潮井上端的激光传感器上。这样既克服了盐雾腐蚀,又提高了设备的可靠性。
4 硬件组成和工作原理
4.1 硬件组成
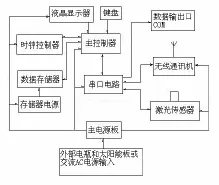
图1 设备总体
4.2 主控制器
主控制器CPU采用STC89C52RC完成,它是51系列单片机的改进型,具有工作稳定可靠,有很强抗电磁干扰性,通过串口实现软件下载,便于软件更新,内置看门狗电路(Watch Dog)便于CPU的管理。
4.3 时钟控制器
时钟控制器采用DS12C887芯片,它是美国达拉斯芯片公司近期专为8位CPU接口设计的产品,有内置电池,在断电的情况下,内置时钟继续行走,再次通电无需进行时钟设置,十二和二十四小时制式任意转换,该片另有113字节片内RAM可供CPU使用,增大了设备随机存储器的空间。
4.4 数据存储器
数据存储器是用来存放过去五十天内的潮位数据,由于设备常在无人值守状态下工作,一旦因数据传输网络不稳或通讯机(DTU)故障,所采集的潮位数据无法正常回传到监控中心,则管理人员有充足时间到现场进行数据下载。通常潮位站水域的最大潮差一般不超过20 m(19.999 m)情形,将该数据压缩用HEX(十六进制)表示是0X1E1F,即两字节 HEX即可表示一次潮位数据,这样每5 min采集一次潮位,一天需要采集288(24×60/5)次,50天共需要28 800字节(288×2×50)的存储空间,选用32 K的RAM即可满足要求,存储的是当今向前50天的潮位数据。当前的RAM芯片主要有动态和静态数据存储器两种,两种RAM与CPU的连接基本相同,静态RAM在断电时数据不会丢失但芯片读写次数受限,验潮仪的一年的数据采集次数要10多万次(288×365),即10多万次的芯片读写,如果采用静态RAM作数据存储器,不到一年就得更换RAM芯片,动态RAM芯片优势在于没有读写次数限制,但需要配备存储电源以保持动态RAM的数据断电时不丢失,一个3 V纽扣电池和一个隔离二极管即可实现。
4.5 串口电路
串口电路由 CH440和 MAX232芯片组成,CH440实际是一个可控制多路电子开关芯片,CPU控制它完成两路的串口输入输出,一路串口连接激光传感器,另一路连接DTU用于数据的传输。另外还并联一路串口可用于管理人员到现场完成数据的下载,MAX232芯片完成串口电瓶转换,即将CPU的TTL串口电瓶转换成232串口电瓶。
4.6 主电源板
主电源板是为整个设备提供所需稳定的直流电压,它由桥电路和保护二极管SA24CA以及开关稳压芯片 K7805-2000和相应电容组成,桥电路的作用是防止直流电接入时正负极接反造成设备的损坏,保护二极管是防止电源干扰。由于设备常在无人值守状态下运行,能耗是关键,采用开关电源芯片K7805是为了提高电源的利用效率。同时考虑到采用电瓶供电,这里加装了电源电压检测电路,由LM311芯片完成,当电瓶电压低于10.8 V时向CPU报警。
4.7 键盘和显示器
用于实现人机对话和数据显示,键盘主要用于对时钟进行设置,显示器显示时钟和潮位数据。
5 数据算法
5.1 数字滤波技术
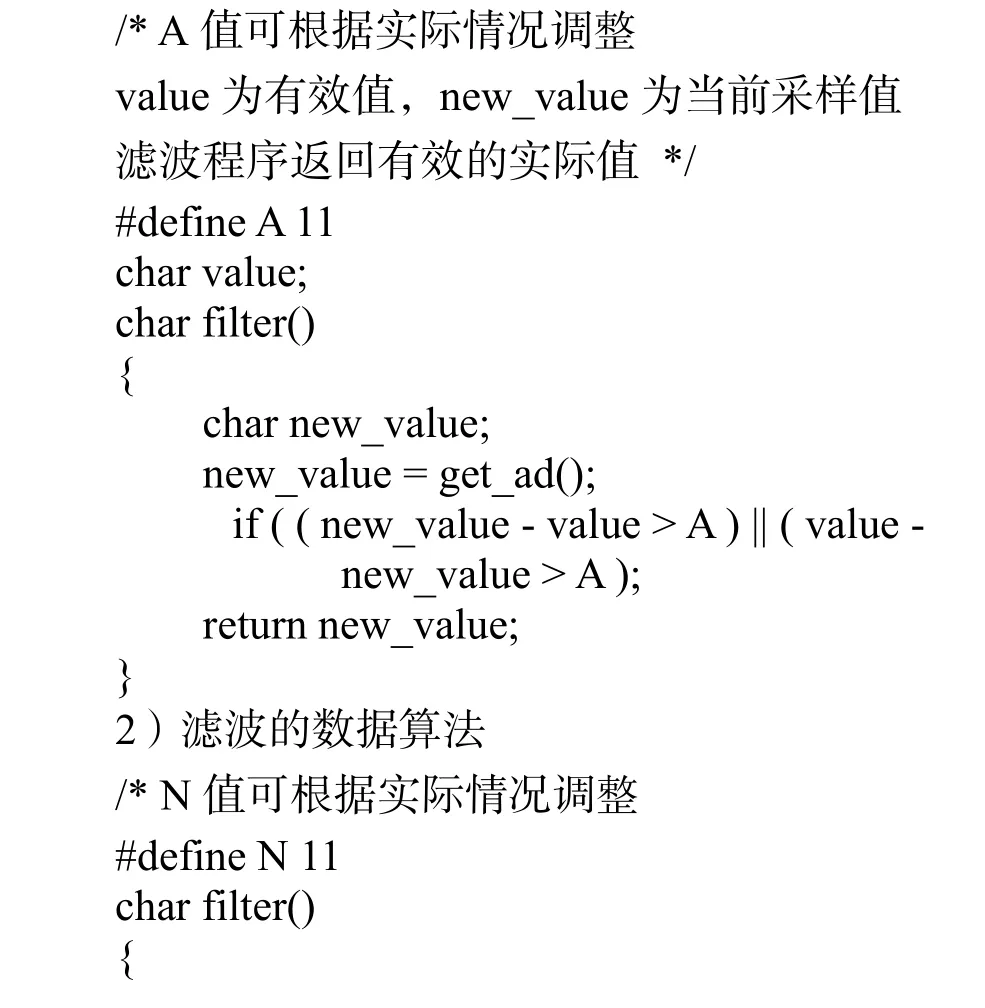
1)程序判断滤波法
方法是通常根据经验确定两次采样允许的最大偏差值△X,若先后两次采样的数据相减值大于△X,表明是干扰数据,舍去,将上次采样数据作为本次采样数据,若小于或等于△X,则确定是本次采集的数据。
2)中值滤波法
中值滤波法是连续采集3个数据,从中选择一个中间值作为正确的采集数据。
3)滑动平均值滤波法
该滤波方法是将采集数据进行循环排队,每次数据采集时先去掉队首的一个数据,再将新采的数据放到队尾,再计算它们的平均值。
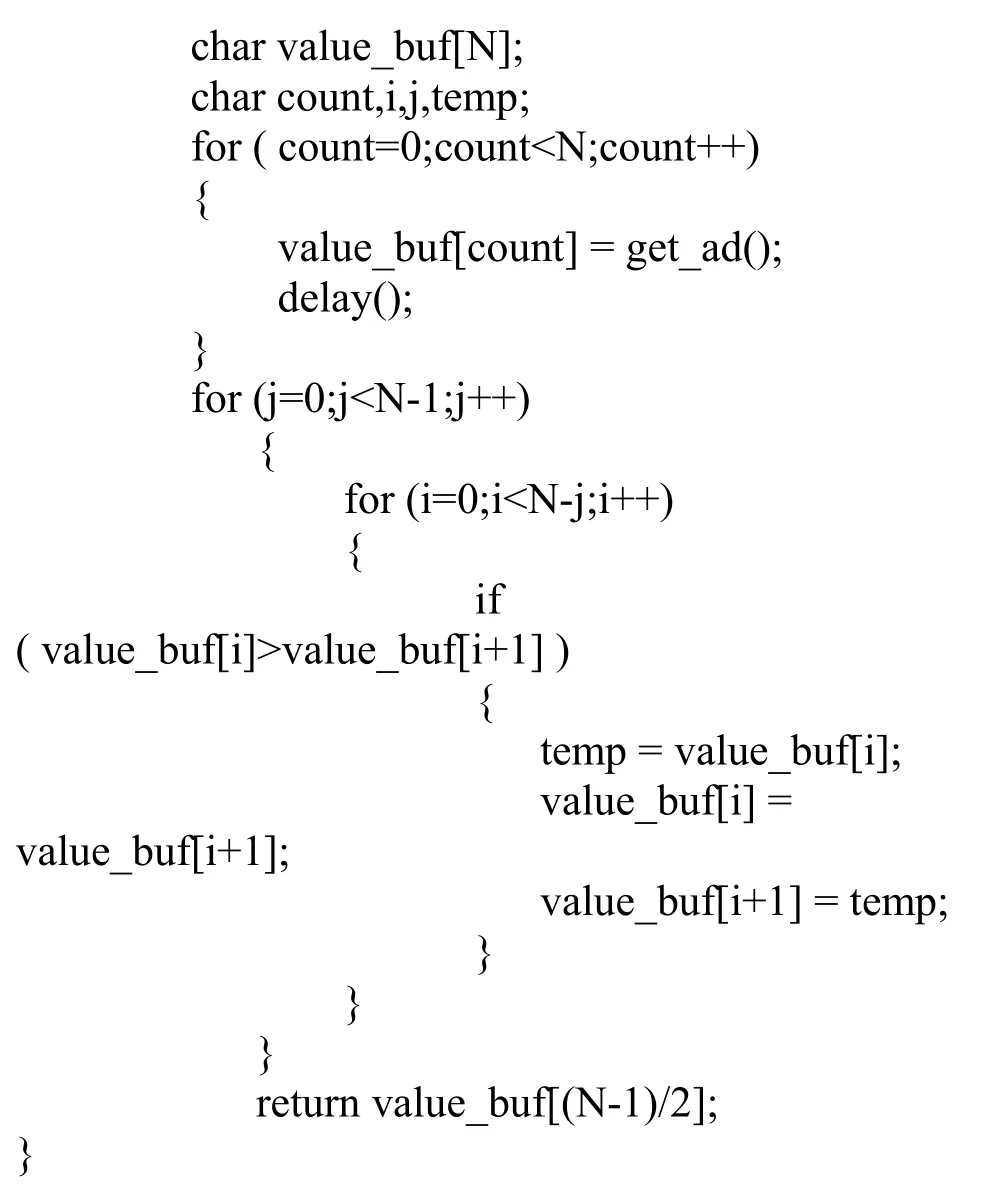
4)防脉冲干扰平均值滤波法
此种滤波法是一次采集N组数据,去掉数据中最大的和最小的数据,然后对其余N-2个数据作平均值处理。
5.2 潮位数据采集
海面是一个动态变化的曲面,对海水海浪、涌浪有效滤除方式是决定潮位数据采集准确与否的关键,多数验潮站的验潮井筒都有对海浪的有效虑除作用,但对涌浪的干扰消除不明显,涌浪通常是较快的上下起伏变化,这对潮位的数据采集准确性影响较大,对此引入了数据算法技术用于抗涌浪的干扰,这样可大大提高潮位数据采集的精确性,研发的激光验潮仪的数据算法就是基于涌浪干扰的实际特征,经反复测试最终选用防脉冲干扰平均值滤波技术有效提升数据采集精度。
5.3 潮位数据采集流程
潮位数据采集流程如图2。
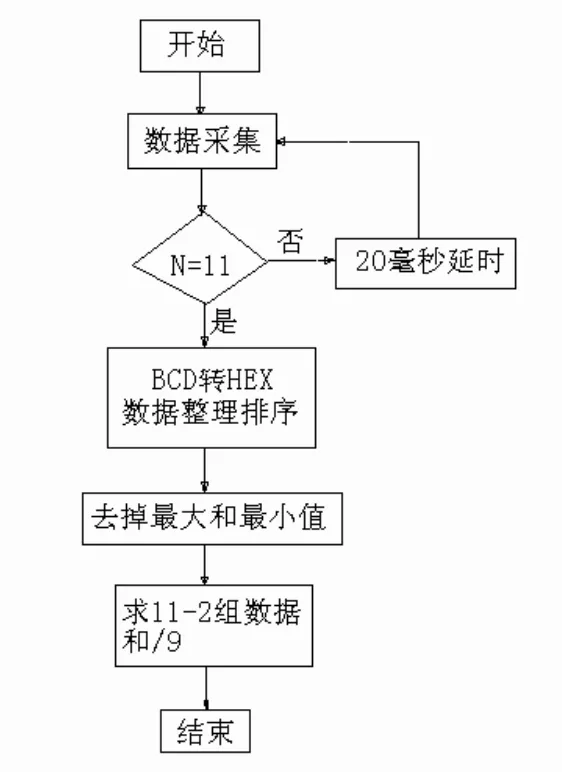
图2 数据采集软件流程
5.4 数字滤波器的部分C语言片段
1)数据采集
6 软件流程图
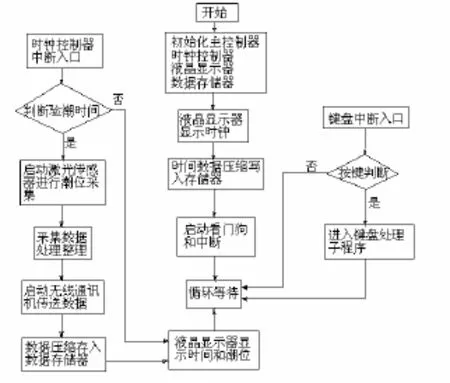
图3 软件流程
从流程图可以看出整个程序包括3部分,即主程序、时钟中断子程序和键盘中断子程序。时钟控制器每一秒钟申请一次中断。
7 数据传输格式

第一行是ID码和PC机当时的时间,下一行的Data是验潮仪回传的数据,两组数据时间上稍有不同是因为PC机的时间和验潮仪的时钟稍有不同造成的。
AA开头码06140855表示6月14日8时55分,0006050001表示当前潮位是06.501 m,CC结束码而且电瓶电压正常,如果电压低于 10.8V,CC为33。
为评估该激光验潮仪采集潮位数据的可靠性,在某标准水文站安装一套激光验潮仪和浮子式验潮仪。该型浮子式验潮仪测量范围0~1 000cm,准确度±1cm,分辨率1 mm,满足水运工程测量规范(JTS 131-2012)中关于水位观测的相关要求。故在测试激光验潮仪采集数据质量时,以浮子式验潮仪采集的数据作为参照标准。将上述两种设备采集的数据进行差值比对,比对结果如表1所示。

表1 激光验潮仪与浮子式验潮仪采集数据比对
由比对结果看,误差符合正态分布,说明该套激光验潮仪的稳定性较高,采集的潮位数据稳定。
8 结 语
激光验潮仪的最大特点是,通过寻找出一种新的潮位采集器即激光传感器,根据激光传感器的工作特点和海面特性,确定合适的数据算法以获得准确的潮位数据,具有设备安装简便,操作简单。该验潮仪2015年3月已获由国家知识产权局颁发的实用新型证书(专利号:ZL 2014 2 0544239.0),其验潮方法2016年7月已获由国家知识产权局颁发的发明证书(专利号:ZL 2014 1 0484927.7)。通过测试,该设备潮位数据采集准确,数据回传到监控中心迅速,完全满足验潮站的潮位采集要求。
[1]黄志伟.STM32F32位 ARM 微控器应用设计与实践[M].
[2]赵效敏.开关电源的设计与应用[M].
[3]王鸿钰.实用电源技术手册[M].
[4]林国荣.电磁干扰及控制[M].
[5]沈德金.MCS-51系列单片机接口电路与应用程序实例[M].
[6]黄继昌.传感器工作原理及应用实例[M].
[7]王幸之.单片机应用系统抗干扰技术[M].
[8]沙占友.新型特种集成电源及应用[M].
Development and Data Algorithm of Laser Tide Gauge
Yang Xicheng,Bian Zhigang,Xiao Hongfei
(Tianjin Hydrographic Center,Tianjin 300222,China)
Based on single-chip technique,by analyzing the operational principle of liquid level sensor and the ranging principle of laser sensor,the self-designed laser sensor and design software are used to achieve the accurate calculation of the collected data,put forward reasonable hardware structures and software programs,and develop a new type of tide gauge.
laser range sensor; digit-filtering technique; tidal level
P716+.23
:A
:1004-9592(2016)06-0107-04
10.16403/j.cnki.ggjs20160627
2016-08-12
杨习成(1959-),男,高级工程师,主要从事电子设备研发工作。