往复式活塞气体流量标准装置控制器的研究
2017-01-12周柏林徐志鹏谢代梁
周柏林,徐志鹏,谢代梁
(中国计量大学 计量测试工程学院 浙江省流量计量技术研究重点实验室,浙江 杭州 310018)
往复式活塞气体流量标准装置控制器的研究
周柏林,徐志鹏,谢代梁
(中国计量大学 计量测试工程学院 浙江省流量计量技术研究重点实验室,浙江 杭州 310018)
往复式活塞气体流量标准装置能扩展活塞装置的流量范围并延长有效检定时间,在简述该装置的结构和工作原理的基础上,针对原系统PLC控制器灵活性不足及ADC精度较低的缺点,提出了一种基于TMS320F2812的往复式活塞气体流量标准装置控制器.介绍了该控制器的硬件构成和软件框架,研究了ADC的校正措施进而提高了ADC精度,实现了伺服电机基于PWM输出的恒速控制和SPWM输出的变速控制.结果表明该控制器ADC的精度优于0.05%,并且易于实现复杂轨迹的运动控制,从而为往复式活塞装置开展深入研究奠定了基础.
气体流量标准装置;活塞;DSP控制器;模数转换器
流量标准装置的研究和应用是流量计量测试技术发展的重要基础.气体流量标准装置用于对气体流量仪表进行检定和校准,主要类型有钟罩式、pVTt法、标准表法、活塞式、皂膜式和称量法等,其中钟罩式和pVTt法为气体流量原级标准装置[1-2].活塞式气体流量标准装置属于容积法标准的一类气体流量标准装置,其结构简单、精度高、工作压力可调、测量速度快,是目前发展最快的一类新型的气体流量标准装置[1].往复式活塞气体流量标准装置以临界流流量计为被检对象,利用两个活塞交替运行,连续产生标准流量气体,突破了缸体容积的限制,延长了有效检定时间,提高了标准装置可检流量上限[3-4].
往复式活塞装置对温度、压力、活塞位移等测量值的准确度要求非常高;对双活塞的控制有简单的恒速控制也有复杂的正弦波形速度控制、低速控制、双电机协同控制等;以实现活塞装置高要求的精密测量和复杂的运动控制,从而提高活塞装置的准确度和可靠性.该标准装置下位机用PLC控制,上位机用LabVIEW控制.PLC的运算速度和处理能力有限、实时性差、缺乏灵活性,难以胜任高要求的运动控制,比如通过PLC控制伺服电机按正弦波形速度运动就不容易,像低速控制、协同运动控制这些需要结合运动控制算法的复杂控制就更加困难.模拟量输入模块SM 1231的精度为满量程的±0.2%,精度较低,难以满足标准装置高精度的测量要求.因此为该标准装置研究一种运算速度快、处理能力强、ADC精度高、实时性好、灵活性好的控制器对于提高标准装置的准确度和可靠性具有非常重要的意义.
数字信号处理器(digital signal processor),简称DSP,以其高速运算能力和强大的数据处理能力在许多领域内得到广泛的应用[5-6].TMS320C2000系列DSP是TI公司面向数字控制、运动控制领域开发的产品,其中TMS320F2812是使用最广的一款定点芯片,它采用静态CMOS技术,功耗低,高性能32位CPU,拥有丰富的编程资源和外设接口,特殊的IQ-math函式库,可以使用定点数来发展所需的浮点数运算算法,能方便地实现复杂的控制算法.特别是在运动控制领域,它的优势就体现得更加明显.结合TMS320F2812在运动控制方面的独特优势,我们提出一种基于TMS320F2812的往复式活塞气体流量标准装置控制器的研究.
1 往复式活塞气体流量标准装置的工作原理
往复式活塞气体流量标准装置采用负压法原理,用来检定临界流流量计如音速喷嘴等的流出系数.联轴器连结伺服电机和丝杆,活塞杆推动活塞运动,活塞缸内气体以恒定流速流经被检流量计、真空泵,最后进入大气.
该活塞标准装置的结构如图1,主要由两个完全相同且对称的活塞系统组成.每个活塞系统由伺服电机、联轴器、丝杆、活塞杆、导向轴、活塞、活塞缸、压力传感器、温度传感器、阀等组成.活塞行程425 mm,单缸有效容积30 L,装置有效容积60 L.检定过程中,活塞缸内气体压力与大气压力相同且保持稳定,活塞以一定的速度将缸内气体经被检流量计、真空泵排出,被检流量计下游由真空泵抽真空以保证被检临界流流量计所需的背压比.
图1 往复式双活塞气体流量标准装置结构图Figure 1 Structure diagram of reciprocating double-pistons gas prover
活塞标准装置有单缸、双缸串联、双缸并联三种最基本的检定模式.
单缸检定模式下,活塞的速度曲线如图2.0~a为活塞加速阶段;a~b为缸内气体压力稳定阶段,一般的,当活塞缸内气体压力波动稳定在20 Pa以内认为气体压力达到稳定状态;b~c为检定阶段;c~d为检定完成后压力缓冲阶段;然后活塞减速到0.检定流程结束后使活塞回原点等待下一次检定.检定过程中,阀门状态为,0~b段出气阀和进气阀同时打开;b~c段进气阀关闭,出气阀打开;c点以后进气阀和出气阀都打开.另一个活塞系统的出气阀始终关闭,进气阀始终打开,把两个活塞系统独立开.
图2 单缸检定模式v-t图Figure 2 v-t diagram of the single-piston calibration mode
双缸串联检定模式实际效果等同于加长了活塞缸,使活塞的有效行程变大,延长了检定时间.活塞A、B和等效活塞的速度曲线如图3.单个活塞的速度曲线和单缸检定模式下活塞的速度曲线一致,在d点切换阀门,由原先的活塞缸A提供标准流量气体变成由活塞缸B提供标准流量气体,两个活塞如此交替循环运行,直至检定完成.通过控制进气、出气阀门的逻辑和时序,使每个活塞缸提供标准流量气体都是独立的,相互之间不产生影响.
图3 双缸串联检定模式v-t图Figure 3 v-t diagram of the double-piston tandem linkage mode
双缸并联检定模式实际效果等同于加大了活塞缸的缸径,相同速度相同时间内活塞推出的标准流量气体体积是单缸检定模式下的两倍,从而提高了标准装置可检流量上限.活塞A、B和等效活塞的速度曲线如图4.活塞A、B的速度曲线相同,检定流程和单缸检定模式一致,两个活塞系统的阀门状态严格同步并保持一致.从等效活塞的位移(速度和时间的积分)可以看出,相同时间内等效活塞的位移是单个活塞位移的两倍,也就是相同时间内等效活塞推出的标准流量气体体积是单个活塞的两倍,从而提高了标准装置可检流量上限.

图4 双缸并联检定模式v-t图Figure 4 v-t diagram of the double-pistons parallel mode
2 标准装置控制器的结构及硬件设计
DSP具有适合数字信号处理的软件和硬件资源,运算速度快,处理能力强,实时性好,编程灵活,能方便地实现复杂的控制算法等特性,而这些特性是PLC所欠缺的甚至在某些方面是不具备的.因此,往复式活塞气体流量标准装置控制器选用DSP作为控制器核心,DSP芯片选用TI公司面向数字控制、运动控制领域开发的产品TMS320F2812.它采用高性能CMOS技术,CPU主频高达150 MHz,时钟周期为6.67 ns,低功耗设计;高性能的32位中央处理器,一个周期内能够完成32×32位的乘法累加运算或2个16×16位的乘法累加运算,采用哈佛总线结构模式,具有快速中断响应和中断处理能力,兼容C/C++语言以及汇编语言;活塞标准装置控制器的结构框图如图5.功率驱动电路用于提高TMS320F2812输出口的驱动能力;电平转换电路实现COMS电平和HTL电平之间的转换;I/V转换电路将温度、压力变送器的电流信号转换成电压信号,输入高精度ADC模块进行模拟量转换;人机界面实现人与控制器之间的信息交互.

图5 控制器结构框图Figure 5 Structure diagram of controller
主要用到了TMS320F2812的通用输入/输出多路复用器GPIO、事件管理器EV、串行通信接口SCI、串行外设接口SPI.通用输入/输出多路复用器GPIO产生通用I/O控制电磁阀通断和接收接近开关信号;事件管理器EV的通用定时器产生高速脉冲控制伺服电机,正交编码脉冲(QEP)电路测量电机转子的转速、旋转方向和旋转位置等信息;串行通信接口SCI实现人机界面与控制器之间的通信;串行外设接口SPI实现高精度ADC模块与控制器之间的数据传输.功率驱动芯片选用74HC245;电平转换通过光耦TLP521实现,TLP521除了起到电平的有效转换以外,还可以将电路前端与负载完全隔离,减小电路之间的干扰.TMS320F2812自带的模数转换器(ADC)精度不高,相对误差有时候最大甚至会超过10%,而标准装置对ADC的精度要求很高,因此选用分辨率为16位、DNL(微分非线性度)和INL(积分非线性度)都为±0.5LSB(0.5倍最低有效位,可以提供17位精度)的AD7606作为标准装置的模数转换器,来实现对温度、压力的高精度地测量.AD7606的典型连接图如图6.配置为内部基准电压下工作,去耦电容滤除高频RF信号,提高AD转换的准确度和可靠性.
图6 AD7606的典型连接图Figure 6 AD7606 typical connection diagram
3 标准装置控制器的软件设计
本文着重研究了控制器ADC校正的软件算法和对伺服电机恒速及正弦波形速度的控制.
根据工程应用经验,AD的采样精度正常都会比理论上少3~4位左右.在实际应用过程中,ADC的精度往往不尽如人意,采样值和实际值之间存在较大的相对误差,给实际应用带来很大困扰.增益误差和偏移误差的存在是ADC采样精度较差的主要原因,要使ADC达到高的采样精度,就必须结合软件算法对ADC进行校正,补偿增益误差和偏移误差.通过两路精准电源,输入到ADC的任意两个通道,读取这两个通道的转换结果,得到AD转换过程中的实际增益和实际偏移量,然后根据被测电压的转换结果就可以得到实际的输入量.采用中值滤波算法对两路精准电源和被测电压的转换结果进行滤波[7-8].ADC校正的程序框图如图7.

图7 ADC校正程序框图Figure 7 Process diagram of ADC correction
伺服电机选择速度控制(模拟量电压指令)方式,以电压为速度指令输入信号.控制器通过事件管理器EV下的定时器产生PWM,程序控制PWM的占空比来控制输出电压的有效值,进而控制伺服电机的转速.对于伺服电机恒定速度控制,只需要保证速度指令输入电压恒定,也就是PWM的占空比恒定不变即可.对于伺服电机正弦波形速度曲线控制,采用SPWM技术[9-10],以正弦波作为调制波,等腰三角形波作为载波,在正弦波与三角波交点处产生控制信号,控制PWM的脉冲宽度,得到一系列等幅且脉冲宽度正比于对应区间正弦波曲线函数值的矩形脉冲,进而控制伺服电机的输出转速按正弦规律变化.恒定速度及正弦波形速度曲线控制的程序框图如图8.

图8 PWM与SPWM程序框图Figure 8 Process diagram of PWM and SPWM
通过DSP集成开发软件CCS5.5完成软件的编写与调试.CCS5.5采用可视化图形接口界面,集成了具有各种调试功能的代码调试工具,可以对TMS320系列DSP进行指令级的仿真和可视化的实时数据分析.此外,CCS5.5还提供了丰富的输入输出库指令和信号处理库函数,为TMS320系列DSP软件的开发提供了极大的方便,是目前最优秀的DSP开发软件之一.
4 实验研究
活塞标准装置对温度、压力的测量误差要求不超过±0.1%,装置上温度、压力变送器的输出信号为4~20 mA的电流信号,通过I/V转换电路变为1~5 V的电压信号,AD7606的8路模拟量输入通道选择±5 V,选取1~5 V之间的5组电压值对控制器的ADC进行实验研究,电压测量值由0.05级的高精度电流电压校验仪ETX-1815输出,分别测得ADC校正前后的采样值如表1.实验结果表明,通过软件算法的配合,可以有效提高ADC的采样精度.校正后的采样值在1~5 V的量程范围内精度优于0.05%,提高了标准装置ADC的精度,满足活塞装置对温度、压力的测量要求.

表1 校正前后电压测量值Table 1 Voltage measurement value before and after correction
对控制器输出恒定占空比的PWM和SPWM进行了实验研究.对于PWM,事件管理器EV下面的通用定时器设置为连续增/减计数模式,输出极性为低电平有效,设定PWM频率为1 kHz,占空比为40%,控制器输出的PWM波形和占空比如图9.从图9(b)可以看出,控制器输出PWM的占空比为40%且恒定不变,即输出电压的有效值不变,电机恒速运行,活塞装置输出恒定流量.
对于SPWM,调制正弦波的频率为1 Hz,载波比设为60,调制度设为0.8;事件管理器EV下面的通用定时器设为连续增/减计数模式,产生三角波作为载波,载波频率60 Hz,输出极性为高电平有效;打开通用定时器的周期中断,在周期中断函数中改变定时器比较寄存器的值(该值决定PWM的占空比),使其按正弦规律变化.控制器输出的SPWM波形和占空比如图10.从图10(b)可以看出,控制器输出SPWM的占空比按正弦规律变化,即输出电压的有效值按正弦规律变化,电机按正弦波形速度运行,活塞装置输出动态流量.
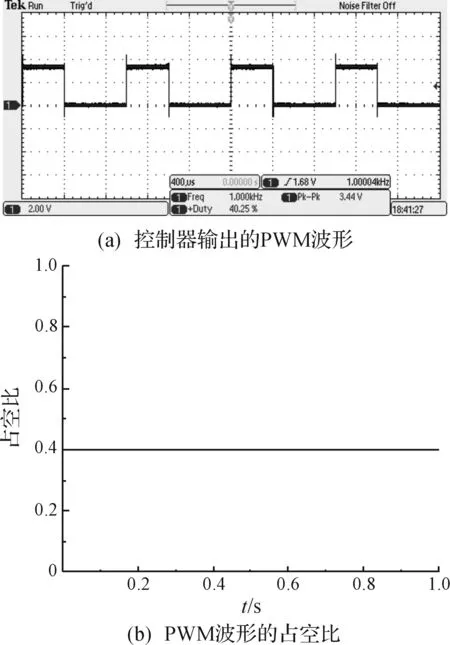
图9 PWM输出波形和占空比Figure 9 Waveform and duty cycle of PWM
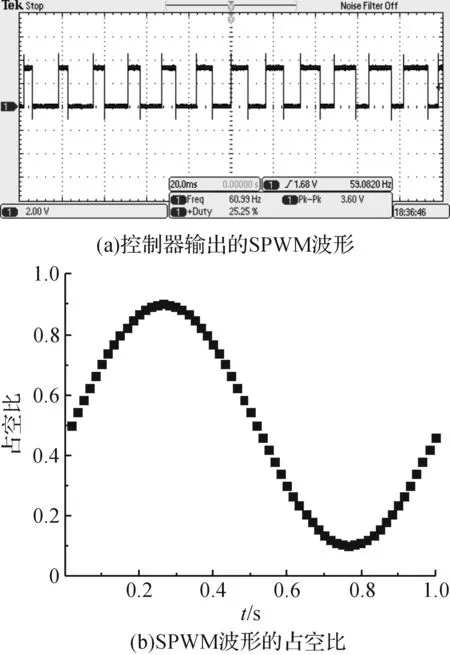
图10 SPWM输出波形和占空比Figure 10 Waveform and duty cycle of SPWM
5 结 语
针对往复式活塞气体流量标准装置原控制系统PLC控制器灵活性不足及ADC精度较低的问题,我们研究了基于TMS320F2812的往复式活塞气体流量标准装置控制器.该控制器具有8路模拟量输入通道,量程在±5 V和±10 V之间可选的高精度ADC,在1~5 V的量程范围内精度优于0.05%;可以编程输出最多16路恒定占空比的PWM或占空比按正弦规律变化的SPWM,分别控制伺服电机恒速运行和正弦波形速度运行,使活塞装置输出恒定流量和动态流量.该控制器编程灵活,容易实现复杂的运动控制,因而具有较好的经济性和应用灵活性.
[1] 陈慧云,程佳,黄震威,等.一种电驱动双活塞式气体流量标准装置的研制[J].传感器与微系统,2013,32(1):87-90. CHEN Huiyun, CHENG Jia, HUANG Zhenwei, et al. Research of a electrical driving double pistons gas prover[J]. Transducer and Microsystem Technologies,2013,32(1):87-90.
[2] 陈慧云,程佳,李东升,等.电驱动双活塞式气体流量标准装置的仿真研究[J].中国计量学院学报,2013,24(1):25-29. CHEN Huiyun, CHENG Jia, LI Dongsheng, et al. Simulation study of the electrically-driven double-piston gas flow standard device[J]. Journal of China University of Metrology,2013,24(1):25-29.
[3] XU Z P, DAI J Y, CHEN H Y, et al. Development of a reciprocating double-pistons gas prover[J]. Flow Measurement & Instrumentation,2014,38(8):116-120.
[4] 戴佳音.伺服驱动双活塞气体流量标准装置控制特性研究[D].杭州:中国计量学院,2015. DAI Jiayin. Research on the control characteristics of a reciprocating double-pistons gas prover[D]. Hangzhou: China Jiliang University,2015.
[5] 李昆亮,俞子荣,陈黎娟.基于DSP的风力发电机主控制器系统设计[J].计算机与现代化,2015(2):106-109.
LI Kunliang, YU Zirong, CHEN Lijuan. Design of main control system of wind turbine based on DSP processor[J]. Computer and Modernization,2015(2):106-109.
[6] 李娟,鲁宁.基于DSP的并联消弧线圈控制器的设计[J].电子技术与软件工程,2014(6):128-129. LI Juan, LU Ning. Design of parallel arc suppression coil controller based on DSP[J]. Electronic Technology & Softwaer Engineering,2014(6):128-129.
[7] 唐权华,周艳,金炜东.中值滤波算法的研究与改进[J].微计算机信息,2008,24(24):187-189. TANG Quanhua, ZHOU Yan, JIN Weidong. Research and improvement of median filter algorithm[J]. Microcomputer Information,2008,24(24):187-189.
[8] 鲍华,樊瑜波,饶长辉,等.基于均值查找的快速中值滤波算法[J].四川大学学报(工程科学版),2011,43(2):76-79. BAO hua, FAN Yubo, RAO Changhui, et al. Fast median filtering algorithm based on mean searching[J]. Journal of Sichuan University(Engineering Science Edition),2011,43(2):76-79.
[9] 王勇,高宁,罗悦华,等.三相三电平并网逆变器无死区SPWM控制研究[J].中国电机工程学报,2011,31(21):70-75. WANG Yong, GAO Ning, LUO Yuehua, et al. SPWM research for dead-time elimination in three-phase three-level grid-connected inverter[J]. Proceeding of the CSEE,2011,31(21):70-75.
[10] 毛惠丰,陈增禄,任记达,等.SPWM数字化自然采样法的理论及脉冲误差分析[J].中国电机工程学报,2006,26(9):131-136. MAO Huifeng, CHEN Zenglu, REN Jida, et al. Theory and pulse error study of digital natural sampling based SPWM[J]. Proceeding of the CSEE,2006,26(9):131-136.
Research on a reciprocating piston gas prover controller
ZHOU Bolin, XU Zhipeng, XIE Dailiang
(Zhejiang Province Key Lab of Flow Measurement Technology, College of Metrology and Measarement Engineering,China Jiliang University, Hangzhou 310018, China)
The reciprocating piston gas prover can extend the verification flow range and prolong the verification time. A reciprocating piston gas prover controller based on TMS320F2812 was proposed to overcome the shortcomings of less flexibility of PLC controllers and low accuracy of ADC. The hardware structure and the software framework of the controller were introduced. The accuracy of ADC was improved by the correction measure. The output of PWM and SPWM which were controlling servo motor constant speed run and sine wave speed run were realized. The results showed that the error of the ADC was less than 0.05%, and it was easy to realize the complex track control, which laid the foundation for further research of the reciprocating piston gas prover.
gas prover; piston; DSP controller; ADC
2096-2835(2016)04-0394-06
10.3969/j.issn.2096-2835.2016.04.007
2016-10-07 《中国计量大学学报》网址:zgjl.cbpt.cnki.net
国家自然科学基金资助项目(No.51305419).

TB937
A
