基于MATLAB的电液力伺服控制系统的研究
2017-01-11曹旭妍
智能制造 2016年7期
曹旭妍


本文根据电液力伺服控制系统的工作原理,建立其数学模型,利用MATLAB软件为其构建仿真模型,并获得反映系统性能的仿真曲线,完成系统的静、动态分析。基于Simulink工具箱设计出PID控制器,有效解决了系统本身非线性所造成的控制效果不佳的问题,仿真结果表明,该控制器满足控制系统要求,控制效果良好。
一、引言
电液力伺服控制系统普遍具有精度高、响应快以及结构简单等特点,广泛应用于工业控制等领域。但是液压伺服控制系统是非线性复杂系统,在控制精度和稳定性上不能满足要求,有时需要附加合适的控制器才能取得比较理想的控制效果。在电液力伺服系统的设计过程中,基于Matlab软件,能快速准确地完成系统的静、动态分析,提高了设计效率,并根据分析结果,采用Simulink工具箱,设计出PID控制器,该控制算法解决了电液力伺服系统的非线性,使系统的快速性、稳定性等都能满足要求,具有良好的控制效果。
二、系统组成及数学模型的建立
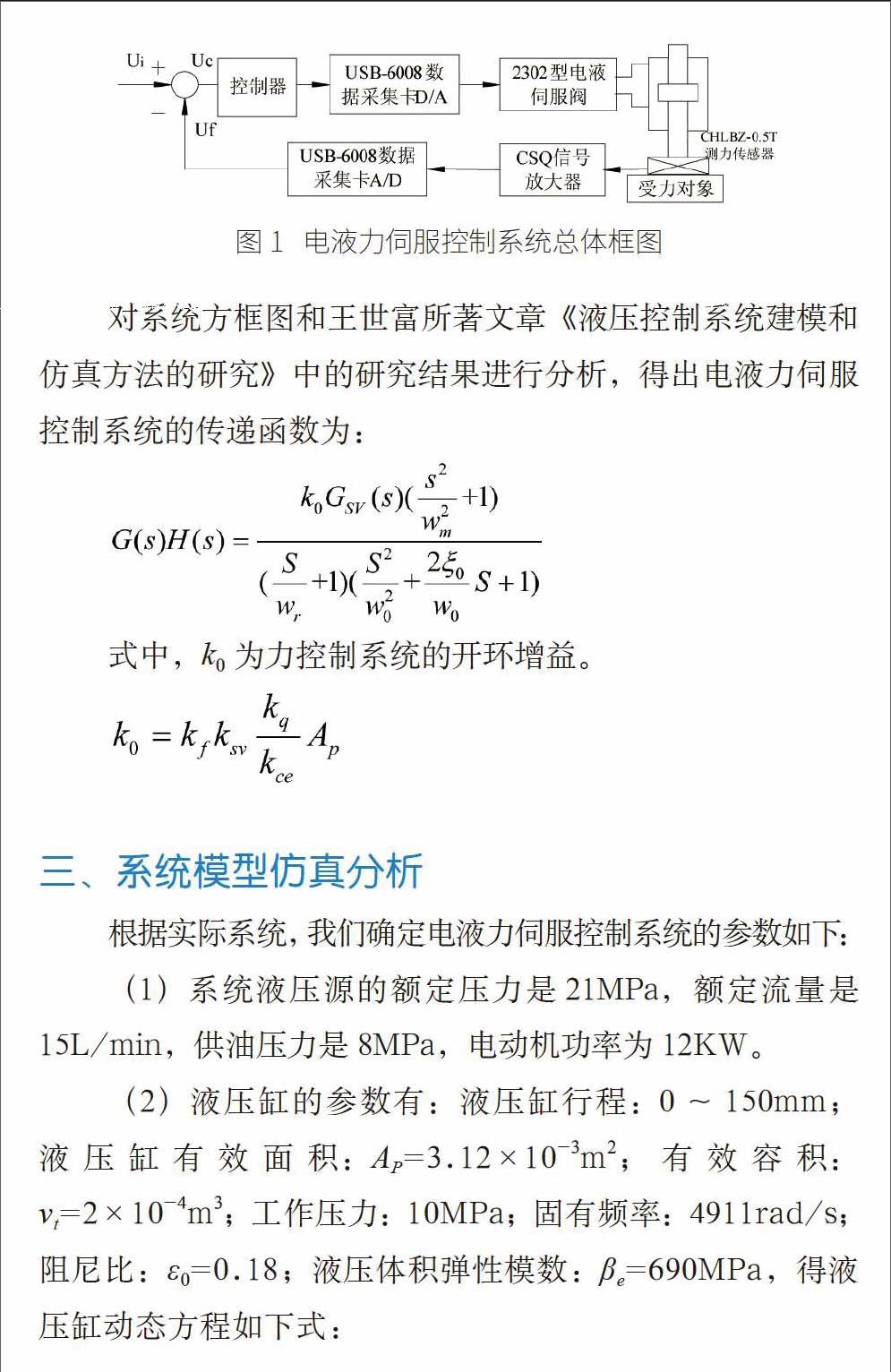
本文设计的电液力伺服系统实验平台主要由个人计算机、伺服阀、液压缸、测力传感器、受力对象、传感器信号单路放大器和数据采集卡所组成。给系统输入负载力后便开始工作,使液压缸活塞杆输出负载力。该力由测力传感器检测,转换为电压信号,由数据采集卡进行A/D转换后反馈到计算机中,与指令电压信号进行比较,计算机根据电压偏差来计算当前电压控制量,进行D/A转换后来驱动电液伺服阀,以伺服阀开口方向和大小来控制进入液压缸的液压油的多少及方向,并作用在活塞杆上,从而使输出力达到期望值。图1为电液力伺服控制系统的总体框图。
