旋翼无人机室内自主避障飞行研究
2017-01-11杨淑媛
杨淑媛
(山西工程职业技术学院,山西 太原 030009)
旋翼无人机室内自主避障飞行研究
杨淑媛
(山西工程职业技术学院,山西 太原 030009)
无人机在军事和民用上的广泛应用,使其成为全球范围的研究热点。自主飞行控制及避障能力是保障无人机安全飞行的前提条件。本文在研究国内外旋翼无人机控制及现有避障技术的基础上,针对静态未知的复杂室内环境,设计了一种融合多传感器测距及视觉技术的自主避障方案,并于四旋翼实物平台上进行避障飞行实验,验证了方案的可行性。
旋翼无人机;飞行控制;避障技术;模糊控制
近年来全球自然灾害频发,严重影响人类生命安全,而二次灾难又对营救者带来了极大的风险,这时搜救机器人进入人们的视野,它可以代替营救者搜救被困人群。现代科技的发展,为人们获取危险艰难环境的信息提供了便利,尤其是在高度复杂的城市环境及山区环境,用小型无人飞行器搭载侦测设备,进行航拍及信息提取、人员搜救都更为方便。
随着环境复杂程度的加大,避障范围逐渐减小,如何有效安全地实现旋翼无人机自主飞行成为值得深入研究的问题。高效快速的自主避障能力成为衡量无人机智能化水平的重要指标,无人机感知环境的能力与相应的避障策略也成为避障技术的关键点[1]。基于以上背景,本文的研究对推动与发展旋翼无人机的理论与技术起到一定的作用,同时对加强国家军事建设,推动各关联产业及先进技术的发展,创造经济价值等具有一定的推动作用。
1 避障控制系统设计方案
为了成功实现旋翼无人机自主避障飞行,本系统融合了传感器测距、视觉技术、路径规划、防碰撞等技术[2],使旋翼无人机能够实时采集周围环境信息,确定障碍物的位置及障碍物四周的开阔程度,并且根据预先设定的特征识别并跟踪目标,实现追踪过程中的自动避障功能。避障控制系统方案设计如图1。
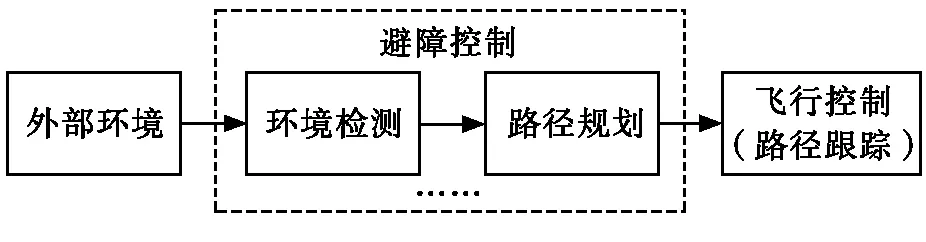
图1 避障控制系统方案
2 环境检测系统
本设计中,环境检测部分运用了红外测距传感器、超声波传感器及CCD摄像机(视觉传感器),旋翼无人机飞行环境信息的获取是基于多传感器数据融合,采用模糊逻辑方法实现的。环境检测系统方案如图2。

图2 环境检测系统方案
2.1 传感器测距
2.1.1 红外测距传感器
利用红外信号遇障碍物反射信号强度的不同来判断障碍物距离的远近。当红外线遇障碍物被反射,则由红外接收电路的光敏接收管接收前方物体反射光,据此判断前方是否有障碍物。红外光电管接反射回的红外线信号后将其转化为电信号,电信号的能量大小反映了反射距离信息,旋翼无人机据此来探测机身与障碍物之间的距离,做出避障决策。
本设计选择GP2Y0A710K0F红外测距传感器,其测量距离可达到100~550 cm,符合无人机探测基本要求。
2.1.2 超声波传感器
超声波测距不需要与物体直接接触,且方向性好,强度比较容易控制,是作为高度测量较为优先考虑的手段。但由于发散角大、方向性较激光宽,超声探测具有一定的固有角度误差,在本设计中仅将超声波传感器作为定高传感器,得到的是传感器和地面之间的距离信息,由此来确定及稳定旋翼无人机的飞行高度。
本设计中采用美国高精度超声波传感器MaxSoanr-EZ,这款超声波传感器分辨率可达到1 cm,有效测量距离5 m,测量信息可以脉宽或电压两种方式传输,适用于旋翼飞行器的定高测距。
2.2 视觉技术
2.2.1 图像获取
图像获取单元主要由镜头、彩色CCD摄像机和图像采集卡组成。CCD摄像机装配在无人机机身正前方,跟随无人机同步运动实时捕获图像[3]。本设计选用亚安S17一体化相机。图像采集卡通过视频电缆的传送获取摄像机拍摄的模拟视频信号,并将该信号转换成数字视频信号,交给图形工作站处理。本设计采用凌华PCIe-RTV24实时图像采集卡,它是一款CompactPCI规格的图像采集卡,专为安保和视频监控应用而设计,是PC-based多通道数字视频监控的理想选择。
2.2.2 图像处理
从视觉传感器获取的图像易受到噪声干扰或是背景环境的影响,需进行图像预处理,包括图像的去燥、灰度化、边缘检测等。
实验中原始输入图像是摄像头采集768*576像素的RGB格式图像,最大帧数25帧/s。先将彩色图像转换为灰度图像,再将图像的大小依据最近邻域插值法原理进行缩小以节约后续计算时间[3]。此外,本设计中采用canny算子进行边缘检测,检测效果良好。
3 避障路径规划
3.1 避障流程
无人机避障问题是在无人机实现自主飞行的基础上进一步展开的。在飞行过程中,无人机通过所安装的测距传感器、定高传感器及视觉传感器获取障碍物与目标相对于无人机的距离及角度信息。无人机根据障碍物信息判断避障的紧急程度,连同紧急程度及目标信息通过避障路径规划算法确定下一避障导航点,然后按照backstepping飞行控制实现点到点的飞行来完成自主避障飞行,直至到达目标点为止,避障流程如图3所示。
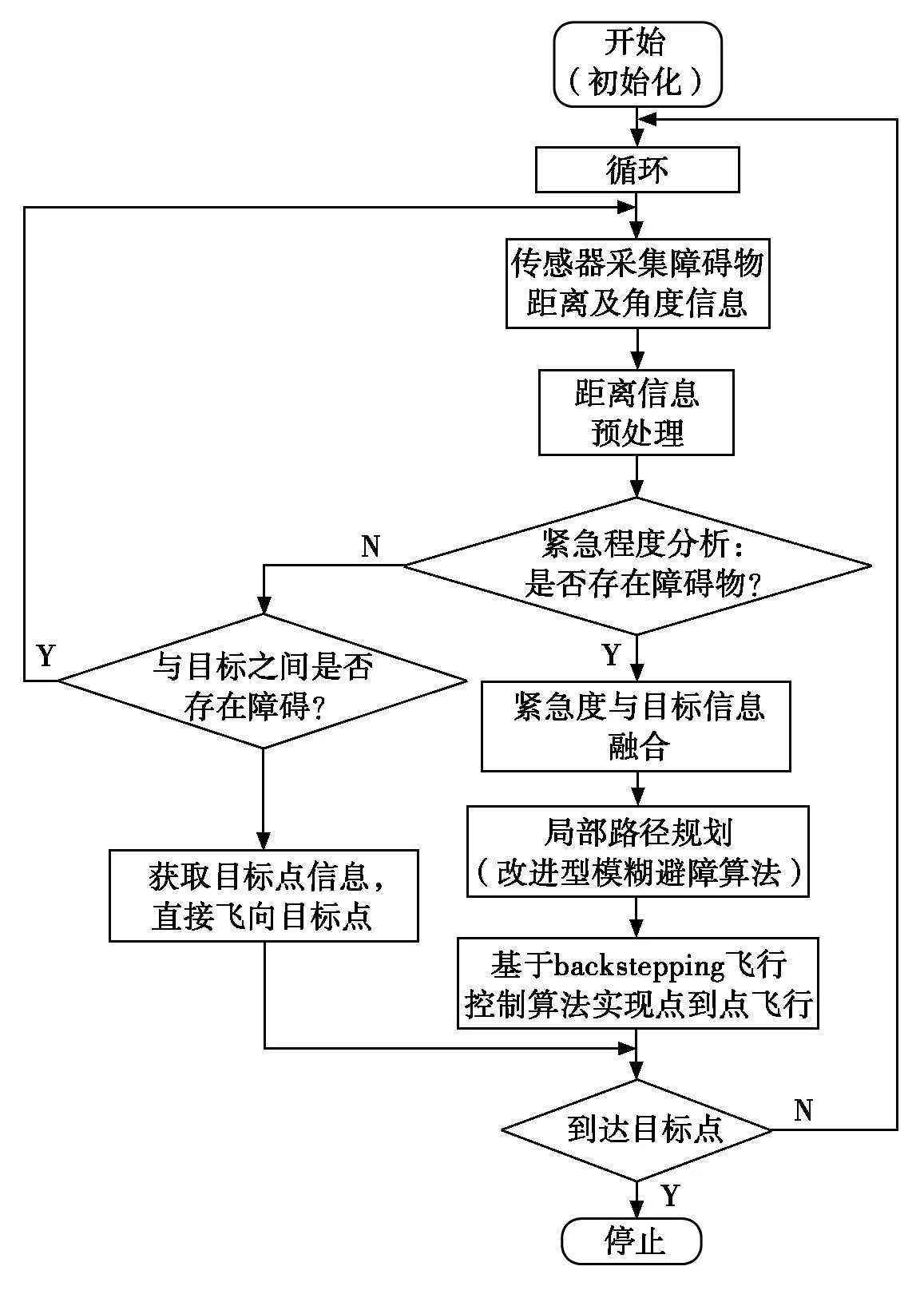
图3 避障流程图
3.2 避障控制器
本设计中,5个红外测距传感器安装在无人机上,相互间隔45°,底部安装定高超声传感器,正前方安装摄像机。传感器数据信息主要有来自摄像机的4个障碍物边界坐标信息,5个红外传感器信息,1个超声波定高信息,共10个信息。由于传感器信息较多,而模糊规则的数量是随着模糊输入的增多呈指数般增长的,规则数量异常庞大,将导致控制器响应速度很慢。为满足实时控制需求,采用一种模糊规则的数量呈线性增长的分层模糊控制器来实时控制无人机进行避障。模糊控制系统包含用来处理测距传感器数据的紧急度模糊控制器(EFC)、速度模糊控制器(VFC)和偏航角模糊控制器(AFC)。
4 飞行试验
经过软硬件综合调试、地面仿真系统测试,对自动驾驶仪控制参数进行初步调整。飞行机架采用塑料材质的Y450,如图4。基本参数如表1。

图4 试验用四旋翼飞行器

相邻电机轴距450mm起飞重量1.8kg(含电池)控制半径1km最大滚转俯仰角30度航向姿态控制范围360度有效载荷1kg续航时间20min(电动)
当传感器探测到无人机假定的安全范围内不存在障碍物,那么无人机执行趋向目标行为。如图5所示,三个画面分别是探测到障碍物,绕过障碍物,趋于目标点的三个状态,分别将障碍物用红色矩形框,目标用蓝色矩形框标记,便于对比分析。从实验结果可以看到无人机很好地绕开了障碍物,飞向目标。

图5 一般避障行为
当无人机在运动时,距离前方动态障碍物体非常近,避障危险度非常大时将触发紧急避障行为,此时,无人机紧急减速,然后触发横向飞行,即偏航角为零时的运动,直至探测到前方无障碍物时再继续前行,如图6所示。

图6 紧急避障行为
当障碍物上方的开阔程度大于左右的开阔程度时,实行区别于地面机器人的三维运动——飞跃障碍行为,如图7所示。

图7 飞跃避障行为
5 结束语
本文以旋翼无人机为研究对象,以测距传感及视觉技术为硬件基础,以模糊控制系统作为避障控制器实现了旋翼无人机室内自主飞行避障控制,并成功应用于实物平台实现真实环境避障稳定飞行。
[1] 倪磊,曾庆化.依靠自身传感器的室内无人机自主导航引导技术综述[J].计算机应用与软件,2012,29(8):160-163.
[2] 钟佳朋.四旋翼无人机的导航与控制[D].哈尔滨:哈尔滨工程大学,2010.
[3] 范艳锋.室内服务机器人视觉处理与导航方法研究[D].北京:北京工业大学,2010.
Research on Indoor Obstacle Avoidance of Quad-Rotor UAV’s
Yang Shuyuan
(ShanxiEngineeringVocationalCollege,TaiyuanShanxi030009,China)
Widely applied in both civil and military domain, UAV’s (unmanned aerial vehicle) become the world-wide research focus in recent years. The abilities of autonomous flight and obstacle avoidance are prerequisites to ensure the safety of UAV’s flight. This paper designs a scheme that intergrades sensors range finding and vision technology for autonomous obstacle avoidance in view of the unknown static complex indoor environment based on the domestic and overseas study actuality. After transplanting the algorithm to quadrotor UAV’s physical platform, it makes series flight experiments of different behavior in indoor environment. The results show the feasibility of the configuration.
quadrotor UAVs; flight control; obstacle avoidance technology; fuzzy control
2016-10-31
杨淑媛(1989- ),女,山西介休人,助教,硕士研究生,研究方向:工业机器人控制。
1674- 4578(2016)06- 0086- 03
V249;V279
A
