履带式推土机电传动系统多能源管理策略研究
2017-01-10涂群章
潘 明,严 骏,涂群章,丁 乔
(1.解放军理工大学 野战工程学院,江苏 南京210007;2. 中国人民解放军63607部队, 甘肃 兰州 732750)
履带式推土机电传动系统多能源管理策略研究
潘 明1,严 骏1,涂群章1,丁 乔2
(1.解放军理工大学 野战工程学院,江苏 南京210007;2. 中国人民解放军63607部队, 甘肃 兰州 732750)
针对包含发动机-发电机组、电池组和超级电容3个能量源的履带式电传动推土机,首先,分析了履带推土机典型作业工况的电能需求;其次,根据3个能量源各自的输出特性,设计了基于小波变换与模糊规则的多能源管理策略;最后,通过MATLAB/Simulink进行了电传动系统建模与仿真分析。仿真结果表明:所设计的多能源管理策略可以快速响应推土作业时的能量需求,能够对电传动推土机的能量分配进行实时有效控制。
履带推土机;电传动;小波变换;模糊控制
0 引言
电传动技术被广泛应用于汽车、工程机械、港口起重机械等领域。作为整车控制的核心内容,相应的能量管理策略也得到了广泛的研究,主要包括:(1)基于规则的逻辑门限值控制策略[1];(2)基于模糊逻辑的控制策略[2];(3)基于局部瞬时优化的控制策略[3];(4)基于静态全局优化的控制策略;(5)分别基于贝尔曼动态规划[4]和最优化方法的控制策略[5]。
电传动技术在推土机上的应用尚处于起步阶段,目前仅有卡特彼勒公司推出了一款电传动推土机—D7E型推土机,相应的能量管理策略也很少有人研究。推土机在行驶工况下的能量管理策略可参考汽车及履带装甲车辆的控制策略,然而在推土工况下,后功率链的功率需求与汽车和装甲车辆存在很大差异,二者的控制策略对推土工况并不适用,因此推土工况下的多能源管理是电传动推土机亟待解决的难题。
本文针对包含发动机-发电机组、电池组和超级电容3个能量源的电传动系统,结合小波变换理论和模糊逻辑控制策略建立了多能源管理策略。在进行能量分配时,不仅满足从功率大小的角度来进行能量分配,而且考虑功率需求的变化频率对发动机-发电机组、电池组和超级电容的影响,发挥超级电容在满足高频暂态功率需求上的优势,使发动机-发电机组稳定工作在燃油高效区,有效减少了电池组充放电电流及充放电频率,有利于提高电池使用寿命。
1 推土机电传动系统结构
本文研究的履带式推土机驱动系统采用串联式双侧电机独立驱动结构,如图1所示。系统主要由综合控制器、发动机-发电机组、整流器、电池组、超级电容、双向DC/DC变换器、驱动电机及其控制器组成。

图1 串联式双侧电机独立驱动系统结构
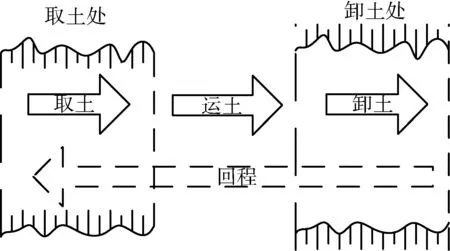
图2 典型推土作业工况
2 多能源管理策略设计
2.1 推土作业工况电能需求分析
图2为推土机典型作业工况之一。设定推土机按照如下方式运行:0~4 s 空载行驶,4~16 s铲土作业,16~30 s运土作业,30~33 s卸土作业,33~35 s停车,35~45 s倒退行驶。
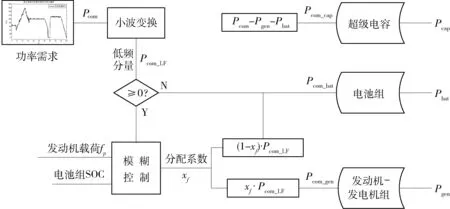
Pcom:总功率需求,Pcap:电容输出功率,Pbat:电池输出功率,Pgen:发动机/发电机组输出功率Pcom_cap:电容目标功率,Pcom_bat:电池目标功率,Pcom_gen:发动机/发电机组目标功率
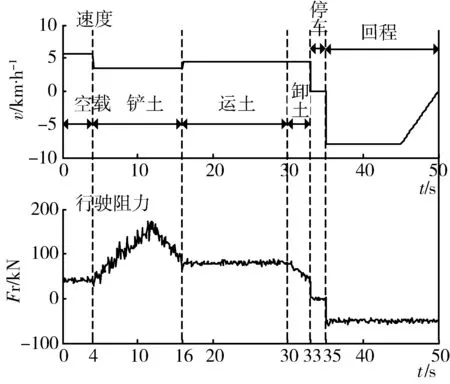
图3 推土机行驶速度与阻力
推土机目标行驶速度和行驶阻力如图3所示,后功率链功率需求如图4所示。从图3可以看出,推土机所受阻力存在一定波动,尤其在铲土阶段,由于切土深度的变化和地面上坚硬障碍物的存在,导致推土铲刀承受较大的冲击载荷,因此推土机后功率链功率需求中存在高频暂态分量。在前功率链的3个能量源中,发动机响应速度较慢,电池组不宜频繁充放电,而且过大的充放电电流会降低电池的使用寿命[6],因此二者均不适于承担高频暂态功率;相反,超级电容的功率密度和充放电循环次数要高得多,能够满足暂态快速功率需求。

图4 后功率链功率需求
根据推土机后功率链功率需求,针对前功率链3个能量源各自的特点,结合小波变换理论和模糊控制理论设计的能量管理策略如图5所示。首先对目标功率需求进行小波变换提取出低频分量,若低频分量为负值,则推土机处于制动状态,将回馈能量用于电池充电;若低频分量为正值,则通过模糊控制规则将能量需求合理分配到发动机-发电机组和电池组。
2.2 小波变换
由于功率需求是离散信号,因此采用离散小波变换将离散功率需求信号分解到不同的分解层。离散小波变换及其逆变换为[7]:
(1)
(2)
其中,x(t)为原始信号;λ为尺度因子,λ=2j,j∈Z;Φ为母函数;μ为平移因子,μ=k2j,j,k∈Z;W为小波系数。
与其他常见的小波相比,Haar小波的母函数在时域中的滤波跨度最短,且Haar小波变换与其逆变换是相同的,表达式为:
(3)
由于其变换比较容易,因此文中利用基于Haar小波的2通道滤波器组,通过一个低通滤波器H0(z)和一个高通滤波器H1(z),分别将原始信号x(t)分解成基准信号和细节信号,通过重构滤波器[G1(z),G0(z)]T实现信号重构[8]。基于三级Haar小波建立的分解和重构输入信号x(t)模型如图6所示。
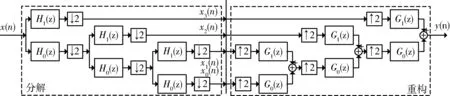
图6 三级Haar小波变换示意图
2.3 模糊控制策略
本文定义了双输入单输出模糊控制策略,模糊控制的基本过程如图7所示。输入为发动机载荷fp和电池组荷电状态(State of Charge,SOC),输出为功率分配系数xf。
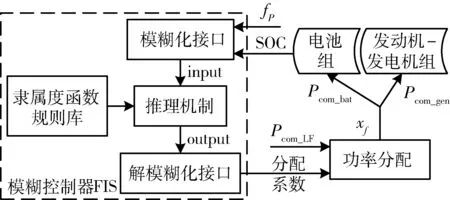
图7 模糊控制策略框图

(4)
其中,Pcom_LF为功率需求中的低频正值部分,Pgen_max为发动机/发电机组的最大输出功率。
发动机/发电机组目标输出功率Pcom_gen和电池组目标输出功率Pcom_bat分别定义为:
Pcom_gen=xf·Pcom_LF
(5)
Pcom_bat=(1-xf)·Pcom_LF
(6)
发动机载荷fp和电池组SOC模糊化后的隶属度函数表达式如图8所示,其中:
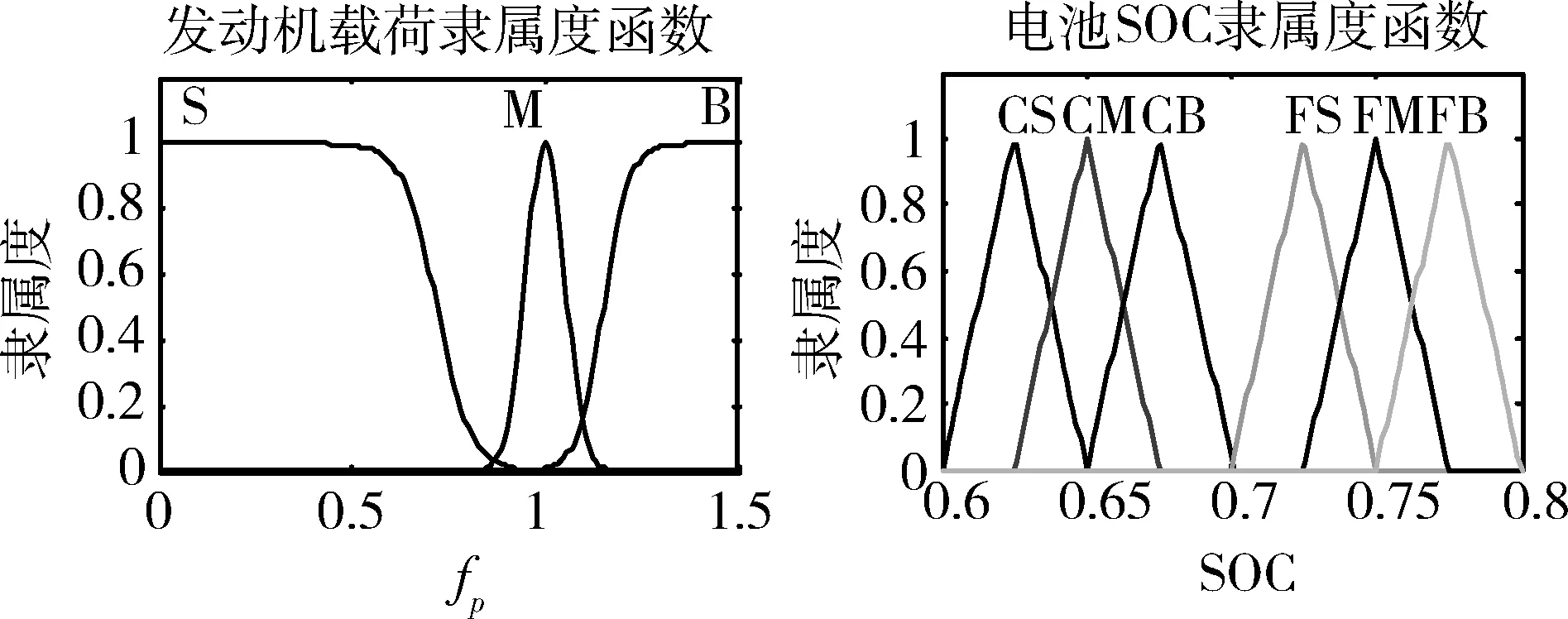
图8 模糊输入隶属度函数
fp:{S,M,B},范围[0~1]代表发动机载荷[0~Pgen_max]。
电池SOC:{CS,CM,CB,FS,FM,FB},范围[0.6~0.8]代表电池组荷电状态变化区间。
分配系数xf定义如表1所示。采用Mamdani作为解模糊化算法[9],设计出18条模糊规则,如表2所示。

表1 分配系数xf隶属度函数
3 电传动系统建模
基于Simulink建立的电传动系统仿真平台如图9所示,主要包括发动机-发电机组模型、电池组模型、超级电容模型。
3.1 发动机/发电机组模型
根据发动机与发电机转速之间的耦合关系,将发动机与发电机作为一个整体进行建模,永磁同步电机加整流桥的等效电路如图10所示,忽略发电机内阻压降和转矩损失,则直流母线电压和发电机电磁转矩可表示为:
(7)
其中,Keωg为发电机感应电动势,Kxωg为等效阻抗,IDC为直流母线电流。
3.2 电池组模型
电池的建模采用等效内阻模型,将电池等效为一个理想电压源与内阻串联,其等效电路如图11所示。因此有:
Ubat=Vbat-IbatRs
(8)
其中,Vbat为电路开路电压,Rs为等效内阻,Ibat电池组输出电流,Ubat电池组端电压。
开路电压Vbat和等效内阻Rs都是与SOC和温度有关的变量,建模时忽略温度变化的影响,Vbat和Rs通过输入SOC值查表获得,电池组SOC通过安时计数法进行计算:
(9)
其中,SOC(t)为当前时刻电池组的SOC;Q0为电池组的初始容量;i(τ)为电池组放电电流,符号规定放电为正,充电为负;Qmax为电池组的最大容量。
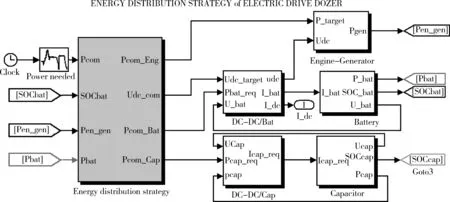
图9 电传动系统仿真平台
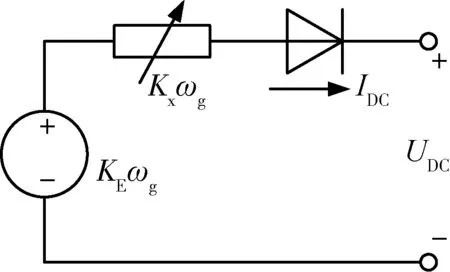
图10 发动机-发电机组等效

图11 电池组等效电路模型
3.3 超级电容模型
电容建模采用等效RC模型,如图12所示。

I0:理想电容的输出电流,Icap:实际输出
根据等效电路模型,有:
(10)
超级电容SOC计算方程如式(11)所示:
(11)
其中,Vmin为电容最小开路电压,Vmax为电容最大开路电压。
4 仿真结果分析
前功率链功率分配如图13所示,从图中可以看出发动机-发电机组作为主要动力源承担大部分功率需求,电池组作为辅助能量源在发动机-发电机组功率输出不足时提供电能,在制动时回收能量,起到削峰填谷的作用。由于提取出了大部分高频暂态分量,发动机-发电机组和电池组功率需求相对平稳,有利于提高发动机组的工作效率和延长电池组的使用寿命。超级电容主要承担功率需求中的高频暂态分量,其快速充放电特性可以满足瞬时功率需求。
发动机-发电机组的目标功率和实际输出功率曲线如图14所示,从图中可以看出发动机组具有良好的功率跟随特性,但是在功率突变处存在一定偏差,主要是由于发动机切换工作状态时需要一定的响应时间。
电池组和超级电容SOC变化曲线如图15所示,电池SOC波动较小,基本保持在0.7左右,超级电容SOC变化较大,在0.45~0.75之间,充分利用了其快速放电和深度优势。电池组和超级电容充放电电压电流分别如图16和图17所示,通过比较,电池组充放电电流在-100~+250 A之间波动,相对平稳,超级电容电流在-200~+400 A之间波动,变化较快。

图13 前功率链功率分配
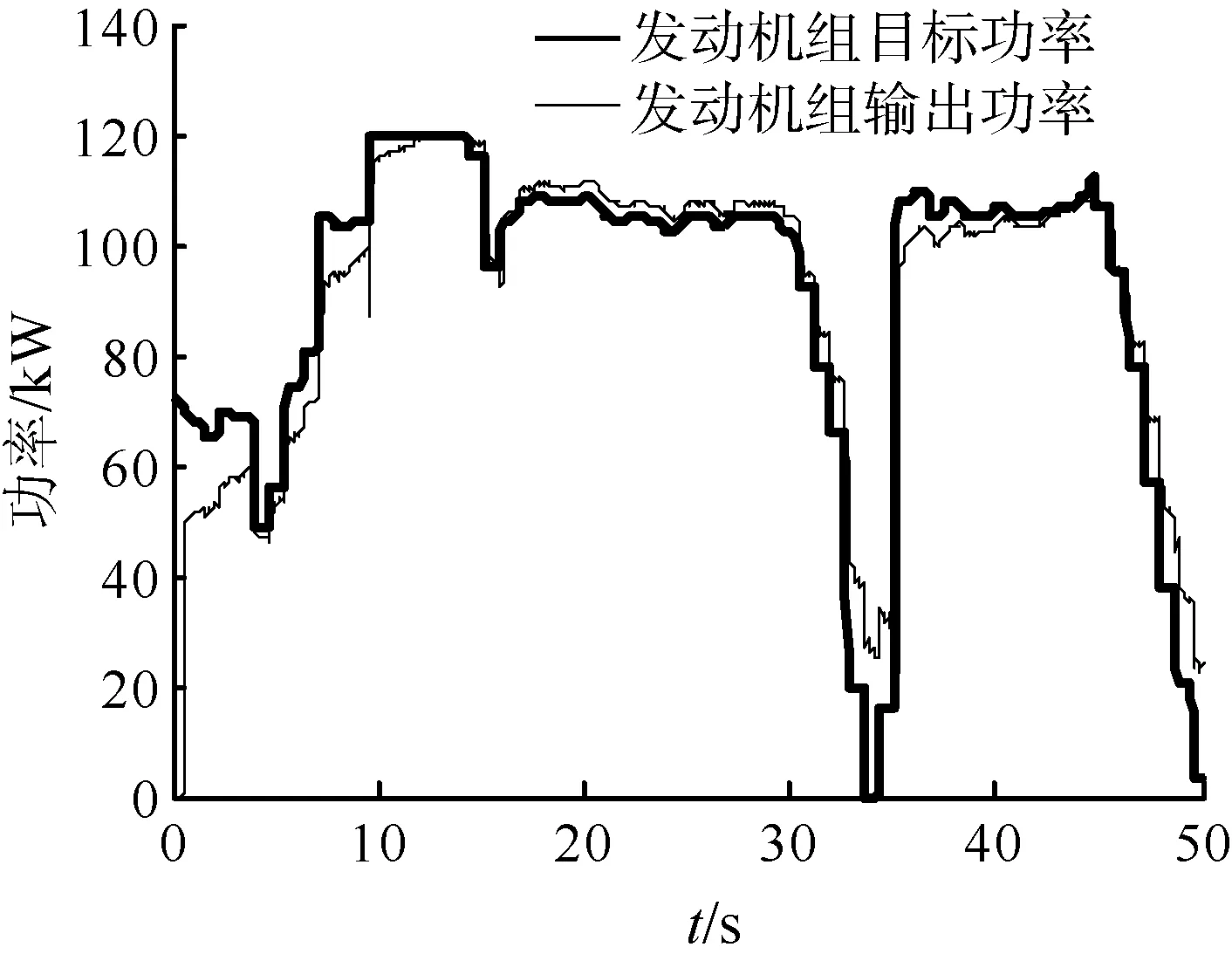
图14 发动机功率跟随曲线

图15 电池和电容SOC变化曲线

图16 电池组充放电电压电流
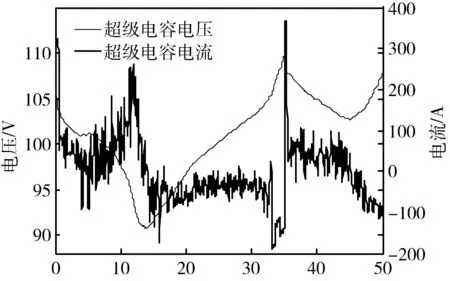
图17 超级电容充放电电压电流
5 结论
本文以履带推土机电传动系统多能源管理策略为研究对象,首先以某型履带推土机典型推土作业工况的能量需求为依据,综合运用小波技术与模糊控制技术设计了前功率链3个能量源的分配策略,之后建立了履带推土机电传动系统仿真平台。仿真结果表明,所设计的多能源管理策略在满足功率需求的前提下,综合考虑3个能量源各自的特点,能够对电传动推土机推土工况下的功率分配进行
实时有效控制。
[1] BANVAIT H, ANWAR S, Chen Yaobin. A rule-based energy management strategy for plug in hybrid electric vehicle[C]. Proceedings of the American Control Conference, 2009:3938-3943.
[2] SCHOUTEN N J, SALMAN M A, KHEIR N A. Energy management strategies for parallel hybrid vehicles using fuzzy logic[J]. Control Engineering Practice, 2003,11(2):171-177.
[3] Wu Jian, Zhang Chenghui, Cui Naxin. Real-time energy management of parallel hybrid electric vehicle based on BP neural network[J]. Electric Machines and Control, 2008,12(5):610-614.
[4] Gu Yanchun, Yin Chengliang, Zhang Jianwu. Optimal torque control strategy for parallel hybrid electric vehicle with automatic mechanical transmission[J]. Chinese Journal of Mechanical Engineering (English Edition), 2007,20(1):16-20.
[5] PEREZ L V, BOSSIO G R, MOITRE D,et al. Optimization of power management in an hybrid electric vehicle using dynamic programming[J]. Mathematics and Computers in Simulation, 2006,73(1):244-254.
[6] JOSSEN A. Fundamentals of battery dynamics[J]. Journal of Power Sources, 2006,154(2):530-538.
[7] FALKOWSKI B J. Forward and inverse transformations between haar wavelet and arithmetic functions[J]. Electronics Letters, 1998, 34(2):1084-1085.
[8] Wang Xin. Moving window-based double haar wavelet transform for image processing[J]. IEEE Transactions on Image Processing, 2006,15(9):2771-2779.
[9] MAMDANI E H, ASSILIAN S. An experiment in linguistic synthesis with a fuzzy logic controller[J]. International Journal of Man-Machine Studies, 1975, 7(1):1-13.
Research on multi-energy management strategy of the electric drive system of a tracked bulldozer
Pan Ming1, Yan Jun1, Tu Qunzhang1, Ding Qiao2
(1. College of Field Engineering, PLA University of Science and Technology, Nanjing 210007, China;2.Troops 63607 of PLA, Lanzhou 732750, China)
The multi-energy management strategy of electric drive system of tracked bulldozer was researched. Firstly, the power requirement in typical working condition of a tracked bulldozer was analyzed. Secondly, the power distribution strategy for three energy sources in the front power chain was proposed by using wavelet theory and fuzzy control theory. At last, model of the electric drive system was built in MATLAB/Simulink and the simulation was carried out. The simulation result shows that back power chain’s power output can meet the front power chain’s power requirement, and the designed multi-energy management strategy can be used in real-time control of the electric drive bulldozer.
tracked bulldozer; electric drive; wavelet transform; fuzzy control
TP391.9;TH39
A
1674-7720(2016)04-0012-05
潘明,严骏,涂群章,等.履带式推土机电传动系统多能源管理策略研究[J] .微型机与应用,2016,35(4):12-16.
2015-10-30)
潘明(1987-),男,博士研究生,主要研究方向:电传动系统能量管理与整车控制。
严骏(1962-),男,博士,教授,主要研究方向:军事装备试验与论证。
涂群章(1969-),通信作者,男,博士,教授,主要研究方向:机械装备机电一体化。 E-mail:tqzlhnj@126.com。
