离岸式风力机的变桨LQR控制
2017-01-10谢双义
谢双义,金 鑫,陈 佳
(1.重庆公共运输职业学院,重庆 402247; 2.重庆大学机械传动国家重点实验室,重庆 400030;
●能源与动力工程●
离岸式风力机的变桨LQR控制
谢双义1,金 鑫2,陈 佳3
(1.重庆公共运输职业学院,重庆 402247; 2.重庆大学机械传动国家重点实验室,重庆 400030;
3.重庆市水文水资源勘测局,重庆 401147)
研究了离岸式风力发电机在额定风速以上时的变桨情况,建立了基于变桨控制系统的状态空间模型,并针对传动链主动阻尼过小的问题,采用线性二次型调节技术对模型的闭环极点进行了合理配置。借助美国可再生能源实验室研发的FAST软件和MATLAB/Simulink仿真软件进行了联合仿真,结果表明,当风力机运行于额定风速以上区域时,设计的变桨控制器能很好地稳定电功率输出,同时也降低了风力机传动链的扭转载荷。
LQR;风力发电机;变桨
陆上风力发电已超过十年的历史,技术相对成熟[1],而离岸式风力机则是近年刚刚兴起,研究相对较少。当风力机运行在额定风速以上,为了不使风轮超速造成对风力机的损害,此时就需要对叶片进行变桨控制,使风轮捕获的风能变小。传统的方法是使用经典控制理论,即对应单输入单输出的情况,由于叶轮的一阶摆振模态与传动链的一阶扭转模态是耦合的[2],因此当叶轮转速保持稳定时传动链的扭矩则变得不太理想。而现代控制理论则可以解决这种情形,因为它对应多输入多输出,即同时考虑叶片的变桨和传动链的扭转载荷,控制效果比较理想。所以本文研究了美国可再生能源实验室提供的张力腿式离岸风力发电机的变桨控制,构建了离岸式风力机变桨控制系统的状态空间模型,并结合线性二次型调节技术(Linear Quadratic Regulator, LQR)对变桨控制器进行设计[3-4]。最后,在MATLAB/SIMULINK软件中搭建仿真模型并与FAST软件进行联合仿真,结果表明,在额定风速以上时,变桨控制器不仅能稳定电功率的输出,而且可使风力机的传动链扭转载荷在一定程度上得到降低。
1 离岸式风力机基础结构图
与采用固定式基础结构的陆上风力机不同,离岸式风力机采用漂浮式基础结构[5-6],主要包括三种[7]:驳船式、张力腿式和单柱式。本文以张力腿基础结构作为研究点,其结构如图1所示。

图1 张力腿式漂浮风力机
2 离岸式支撑结构的动力学模型
2.1 离岸式支撑结构力学模型
2.1.1 辐射波
辐射波浪对离岸式基础结构产生的作用力为

2.1.2 绕射波
Pierson-Moskowitz振幅谱和Jonswap振幅谱[8-9]可用来描述波浪的随机运动。本文采用Jonswap振幅谱的单边功率谱密度:
式中:Hs为有效浪高;ω为波浪的频率;λ为波长;Tp为频谱峰值周期;γ为峰形参数;σ为比例因子。
根据IEC 61400—3[10]的设计标准,比例因子以及峰形参数的取值如下:
W(ω)=

2.1.3 水动力学
波浪作用基础结构时,其浮力表达式为:

3 基于线性二次型调节器(LQR)的变桨控制器设计
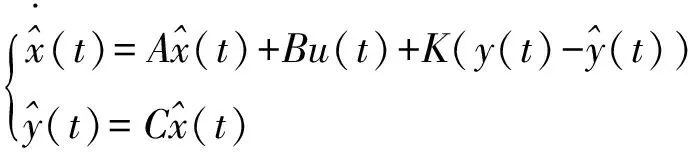
二次型调节器(LQR)理论是以二次型函数的形式给出的一种线性系统,为使此二次型函数取到最小值,矩阵Q和R的选择尤为重要,同时该控制方法在设计时能很容易得到最优的闭环控制结构。但是美中不足的是LQR得到的反馈增益矩阵是基于全状态反馈,而在实际工程操作中这是不现实或者是不必要的,为解决此问题,特引入状态估计观测器[11-13],其数学表达式为:
4 仿真分析
借助仿真软件MATLAB/Simulink,搭建的模型如图2所示。
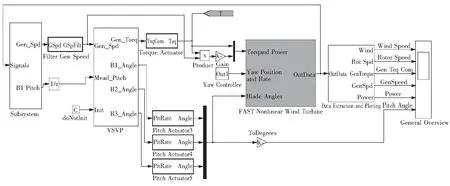
图2 风力机的整体Simulink模型
采用在35 s时的14 m/s每隔4 s阶跃变化到80 s时的24 m/s的阶跃风作为激励,如图3所示,叶轮转速的仿真结果如图4所示。
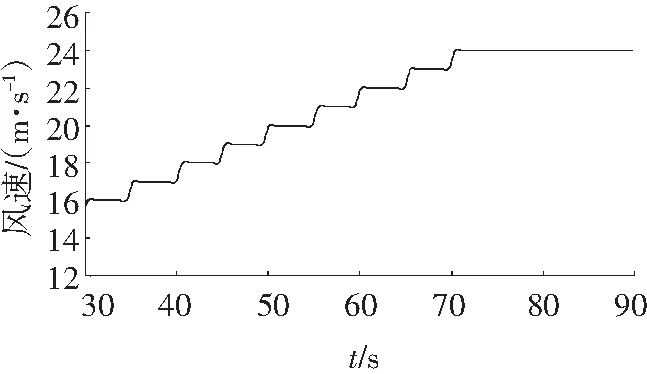
图3 阶跃风

图4 叶轮转速仿真结果
由图4可知,叶轮转速的标准差为0.16,叶轮转速在12.1 r/min额定转速附近趋于稳定,设计的控制器满足实际要求。
为降低风力机传动链的扭转载荷,保护结构不至于损坏,可通过该控制器给传动链增加适当的主动阻尼,仿真激励如图5和图6所示。
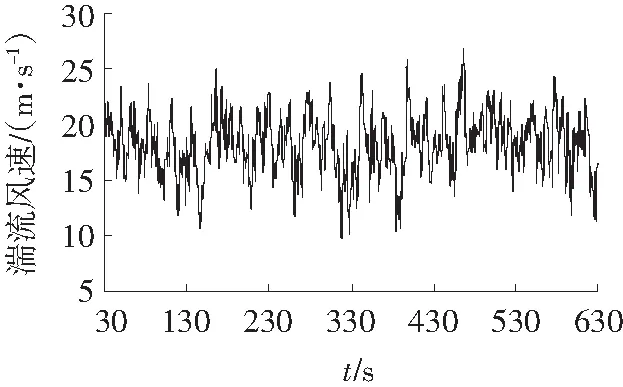
图5 18 m/s的湍流风

图6 波浪高度随时间变化的情形
风力机的传动链在较低阻尼和较高阻尼下,其轴扭矩和电功率的对比如图7和图8所示。

图7 高速轴扭矩

图8 电功率
由图7可知,没有施加主动阻尼时,其高速轴扭矩最大值为51 400 N;当施加主动阻尼时其最大值为50 050 N,相比前者降低2.63%。
由图8可知,当施加主动阻尼时,电功率输出的标准差为128,而没有施加主动阻尼时,其电功率输出标准差为145。
由此可知当增加传动链的主动阻尼时,不仅风力机电功率输出更加稳定,而且风力机传动链的扭转载荷也有所降低。
5 结 语
为了在一定程度上降低离岸式风力机传动链的扭转载荷,采用LQR技术,借助MATLAB/Simulink软件搭建和设计了风力机的变桨控制器并与FAST软件进行联合仿真,结果表明,所设计搭建的LQR变桨控制器,可以使阶跃风激励下的叶轮转速很好地稳定在额定转速附近(标准差为0.16),也可以使湍流风激励下的电功率输出标准差由改进之前的145降低为128,从而使电功率的输出更加稳定,而且还能让风力机传动链的扭转载荷在一定程度上得到降低,相比改进之前降低了约为2.63%。
[1] WATSON G, et al. A framework for offshore wind energy development in the united states[R]. Massachusetts Technology Collaborative (MTC), URL: http://www.mtpc.org/offshore/final-09-20.pdf, [cited 17 November 2005].
[2] WRIGHT A D, FINGERSH L J. Advanced control design for wind turbines part I: control design, implementation, and initial tests[R]. NREL Report No. TP-500-42437, National Renewable Energy Laboratory, March 2008.
[3] 薛定宇. 反馈控制系统设计与分析[M]. 北京: 清华大学出版社, 2000. XUE Dingyu. Design and analysis of feedback control system[M]. Beijing: Tsinghua University Press, 2000.
[4] 陈清. 基于RBF-ARX模型的LQR控制器在四旋翼飞行器系统中的应用[D]. 长沙: 中南大学, 2011. CHEN Qing. Application of RBF-ARX model-based LQR control on quad-rotor helicopter simulator[D]. Changsha: Central South University, 2011.
[5] NIELSEN F G, HANSON T D, SKAARE B. Integrated dynamic analysis of floating offshore wind turbines[C]. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, 4-9 June 2006, pp. 671-679.
[6] MUSIAL W, BUTTERFIELD S, RAM B. Energy from offshore wind[C]. in Offshore Technology Conference, Houston, Texas, USA, 1-4 May 2006, pp. 1888-1898.
[7] BUTTERFIELD Sandy, MUSIAL Walt, JONKMAN Jason, etal. Engineering challenges for floating offshore wind turbines[A]. Copenhagen Offshore Wind 2005 Conference and Expedition Proceedings[C]. Copenhagen, 2005.
[8] ELIZABETH WAYMAN.Couple dynamics and economic analysis of floating wind turbine systems[D].Civil and environmental engineering Massachusetts Institute of Technology,2004.
[9] FALTINSEN O M.Sea loads on ships and offshore structures[M].UK:Cambrige University Press,1999.
[10] EC 61400-3, Wind Turbines-Part 3: Design requirements for offshore wind turbines[S]. International Electrotechnical Commission (IEC), 2006.
[11] KWAKERNAAK H,SIVAN R. Linear optimal control systems[M]. Wiley Interscience, New York, NY.
[12] STOL K, RIGNEY B,BALAS M J. 2000, Disturbance accommodating control of a variable-speed turbine using a symbolic dynamics structural model[C]. Proceeding of the 2000 ASMEWind Energy Symposium, Reno, Nevada, pp. 84-90.
[13] STOL K,BALAS M J. 2002, Periodic fisturbance sccommodating vontrol for dpeed regulation of wind turbines[C].Proceeding of the 2002 ASME Wind Energy Symposium, Reno, Nevada, pp. 310-320.
(责任编辑 郭金光,王莹莹)
Pitch control for offshore wind turbine based on LQR
XIE Shuangyi1, JIN Xin2, CHEN Jia3
(1.Chongqing Vocational College of Public Transportation, Chongqing 402247, China; 2.State Key Laboratory of Mechanical Transmission,Chongqing University,Chongqing 400030, China; 3.Chongqing Hydrology and Water Resources Investigation Bureau, Chongqing 401147, China)
This paper studied the pitch condition of the offshore wind turbine running with the rated wind speed, established the state space model based on pitch control system, and configurated the closed-loop poles of the state space model by LQR so as to overcome small active damping. A co-simulation was made through MATLAB/SIMULINK software with FAST software developed by National Renewable Energy Laboratory (NREL). The simulation results show that the designed pitch controller could not only make a more stable electrical power output with rated speed, but could reduce the drive train torsion load as well.
LQR; wind turbine; pitch
2015-09-06。
重庆市基础与前沿研究计划一般项目CQCSTC(cstc2013jcyja900118)
谢双义(1986—),男,讲师,主要从事风力发电机控制系统建模与仿真。
TM614
A
2095-6843(2016)02-0174-04
