基于GPL模型的仿生爬壁机器人路径规划
2017-01-09朱佩华李雪鹏吴士林
朱佩华 王 巍 李雪鹏 吴士林
北京航空航天大学,北京,100191
基于GPL模型的仿生爬壁机器人路径规划
朱佩华 王 巍 李雪鹏 吴士林
北京航空航天大学,北京,100191
为了研究基于GPL模型的仿生爬壁机器人路径规划问题,提出了一种适合GPL模型的路径规划方法。首先对基于GPL模型的爬壁机器人进行了简单介绍,通过对GPL模型进行运动学、静力学分析,研究了该构型攀爬运动时机器人路径对攀爬能力的影响;其次,基于足端力最优得到了GPL模型腰关节的运动曲线,实现了路径规划;最后,采用ADAMS仿真验证了分析结果的正确性。结果表明,该方法可以解决基于GPL模型的爬壁机器人路径规划问题,同时研究结果也揭示了壁虎等生物原型采用摆动爬行而不是直线爬行的运动合理性。
GPL;爬壁机器人;路径规划;静力学分析;奇异线
0 引言
目前为止,爬壁机器人主要分为车轮式爬壁机器人、履带式爬壁机器人和多足仿生爬壁机器人等。在各种机构中,车轮式爬壁机器人移动速度快、控制灵活,但较难维持一定的吸附力;履带式爬壁机器人对壁面的适应性强,接触面积大,吸附力强,但运动灵活性较差;而多足仿生爬壁机器人灵活性较好,容易跨越障碍物,对于未知壁面和未知环境适应能力强。因此仿生爬壁机器人的研究成为了研究热点[1]。
对仿生原型的特征分析是仿生爬壁机器人构型设计和实验分析的参考依据[2],国内外研究者[3-7]对大鲵(娃娃鱼)等爬行动物的脊椎运动进行了研究,发现该类四足爬行脊椎动物的运动过程往往伴随着腰关节的摆动,蜥蜴在地面攀爬,其脊椎沿着侧向弯曲,该现象在大壁虎沿竖直壁面快速爬行时更加明显。
Schmitt等[8]通过对蟑螂等爬行昆虫类生物的仿生研究,提出了侧向驱动的LLS模型(lateral leg-spring model)。同样,Full等[9]受壁虎固定角度的斜向驱动力启发,提出了 F-G(full-goldman)模型。LLS模型是由一个刚性体和两个铰接于刚性体上的轻质直线弹簧组成,通过弹簧压缩或伸长带动刚性体上升,运动过程中弹簧可绕铰接点自由转动,而F-G模型中,这两个弹簧和刚性体之间的夹角是固定的。这两种仿真模型在爬行时本体会随运动而振荡,稳定性较差,且都不能真实反映四足爬行生物的构型和步态特点。Miller等[10]提出了一种四足爬壁机器人SCARAB,该机器人由一个刚性躯体和固定在躯体上的四个伸缩足构成,攀爬时,前足主动伸缩,后足被动运动,灵活性差。
我们基于对大壁虎等生物原型形态和运动规律的研究,结合F-G模型和LLS模型的特点,提出了一种新的仿生模型——GPL模型(gecko inspired mechanism with a pendular waist and linear legs)。该模型有效改善了上述模型存在的稳定性和灵活性差的缺点,能够更真实地反映四足爬行生物的构型和步态特点。
1 模型介绍
Wang等[11-12]对壁虎在垂直壁面上爬行过程中身体与腿部的协同运动关系进行了研究,大壁虎爬行运动步态如图1所示。
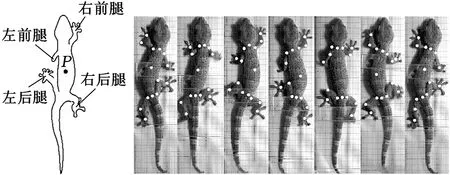
(a)壁虎模型 (b)壁虎爬行步态图图1 大壁虎爬行运动步态图
文献[11-12]的研究表明,壁虎在攀爬过程中身体随着腿部做周期性摆动,其质心随着躯体摆动做对称于中心线的周期性运动。基于以上研究,笔者提出了一种带被动腰关节的四足爬壁机器人GPL模型,并基于模型设计加工样机如图2所示。GPL 模型由四个主动伸缩足、上下两部分身躯和一个被动腰关节组成,上下两部分身躯通过腰关节连接。伸缩足的长度由变量Li(i=1,2,3,4)来表示,伸缩足与上下身固定连接,其固定点到腰关节P的距离表示为di(i=1,2,3,4),伸缩足固定点和腰关节的连线与对应伸缩足的夹角分别为αi(i=1,2,3,4)。

(a)GPL模型 (b)爬壁机器人样机图2 GPL模型以及基于GPL模型的爬壁机器人样机
样机上下身模块之间通过腰关节连接,腰关节为被动运动;四个伸缩足为主动运动,其长度的变化由舵机通过齿轮齿条传动机构控制。机器人可通过对角伸缩足的主动运动实现攀爬或行走。样机整体结构紧凑扁平,尺寸小,质量轻,稳定性好。
2 GPL模型分析及路径规划
2.1 运动学分析正解腰关节坐标
GPL模型的路径规划是指对于腰关节运动的曲线进行规划,在一整个步态周期中,前半周期和后半周期攀爬可视为两个左右对称的运动过程,从动力学分析的角度来讲,两个运动过程完全相同,因此,我们只需要对半周期进行运动和力的分析,另半个周期可以由此类推得到相同的结果。

图3 运动学分析简图
攀爬阶段,当模型处于对角步态攀爬时,对模型进行机构简化,如图3所示。以右后支撑足为原点,建立直角坐标系Oxy。其中O、O1表示支撑足与地面接触形成的暂时转动副,向量O O1用L表示,其横坐标绝对值和纵坐标绝对值分别为Lx、Ly。
由矢量法易得机构运动学矢量方程为
L1+d1+d2+L2=L
(1)
(2)
当θ1≠θ2时
(3)
进一步有
P=L2+d2
(4)
于是,腰关节位置的正解方程为
(5)

(6)
此时L1、L2不再是θ1、θ2的函数,存在多组解。由于运动的连贯性,虽然正解存在多解性,但是真实运动由于惯性并不会出现奇异性。
对式(1)和式(6)分别求导,即可求得腰关节速度:
(7)
A=(Lx+xP)sinθ1+(Ly-yP)cosθ1
B=(yPcosθ2+xPsinθ2)
2.2 静力学分析得支撑足竖直拉力与腰关节坐标方程组
路径规划的目标是使支撑足竖直拉力尽可能小,考虑模型加速度造成的惯性力对于整体模型影响远小于其他因素的影响,于是依据静力学分析,进行路径规划。将支撑足简化为轻质杆,上身模块重力简化为上身模块质心重力m1g,下身重力简化为下身质心重力m2g,上下身的受力分析简图见图4。

图4 受力分析简图
根据受力分析,上下身分别对腰关节取矩,由x、y方向受力平衡可得
(8)
其中,β1(β2)为上(下)模块的等价质心与d1(d2)夹角,距离腰关节长度为z1(z2)。
于是Fy1大小与角度θ1、θ2的关系为
(9)
Q=d1cos(θ1+α1)+L1cosθ1=Ly-yPW=d2cos(θ2+α2)+L2cosθ2=yPC=d1sin(θ1+α1)+L1sinθ1=Lx+xPD=d2sin(θ2+α2)+L2sinθ2=-xPWC-QD=LyxP+LxyP

2.3 路径规划
2.3.1 GPL模型奇异线确定
奇异位形给机构控制带来很大的不利影响,会造成整体能耗无穷大的情况出现,为了减小或消除奇异性对系统的影响,在控制过程中通过轨迹规划来回避奇异位形点。
在GPL模型中,腰关节P点为机构的末端输出点,雅可比矩阵是分析其奇异线的方法,由式(7)可以看出,GPL模型的雅可比矩阵为
(10)
则行列式

机构的奇异位形出现在雅可比矩阵的行列式为0或趋于∞处,可知LyxP+LxyP=0时,det J=∞。奇异线为LyxP+LxyP=0。本机构的奇异位形出现在腰关节位于支撑足两点的连线上。
2.3.2 腰关节可行域确定
由于机构尺寸受约束,确定机构尺寸后,腰关节路径有一个可行域,即确定腰关节坐标(xP,yP)取值范围。由式(5)可得
xP=-d2sinα2secθ2-yPtanθ2
(11)
结合运动学模型,设定yP为定值,可得对应满足机构约束条件下xP的最小值和最大值。目标函数为minxP,min(-xP)。机构约束条件为实际两伸缩足可以运动长度以及yP与θ1、θ2的等式约束条件。
(12)
其中,Ljmin、Ljmax为两伸缩足可以运动的极限长度,由式(3)可知,L1、L2是关于θ1、θ2的函数。
设定yP为定常值,利用优化算法得到相对应θ1、θ2下使得xP最小和-xP最小的值,画出对应曲线,可得到腰关节可行域。样机参数如表1所示,采用MATLAB模拟得腰关节可行域如图5所示。
表1 模型样机参数

d1(mm)d2(mm)m1(g)m2(g)α1(°)α2(°)1721332433272845z1(mm)z2(mm)Lx(mm)Ly(mm)β1(°)β2(°)117902704703855L1min(mm)L2min(mm)L1max(mm)L2max(mm)110110160160
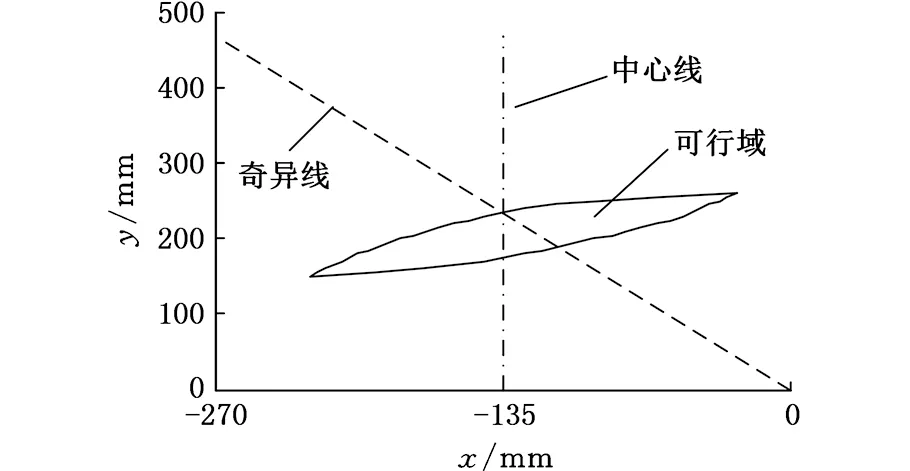
图5 腰关节可行域
2.3.3 利用优化算法得腰关节位置与Fy1大小的规律
轨迹优化的目标就是要使支撑足竖直方向拉力较小,即减小式(9)中Fy1值,这样对应舵机驱动力也可以相应减小,即得到目标函数为min Fy1,约束条件与式(12)一致。
利用优化算法求最优解,可得到对应的θ1、θ2,代入式(11)可得到对应的xP,即可得到一组最优值(xP,yP)。将表1中模型参数代入该最优值方程中,用MATLAB解得对应最优值坐标(xP,yP),如图6所示。在此路径下得到的足端力曲线如图7所示。

图6 优化算法下xP-yP曲线

图7 优化算法下yP-Fy1曲线
结合图5~图7可以看出优化后路径与可行域边界重合,随着xP、yP靠近奇异线,力出现快速增长趋势。可以推出:腰位置越远离奇异线,Fy1越小。
2.3.4 结合GPL模型路径规划特性实现路径规划
为了保证后半个步态初始位置的可控性和后期所有步态的确定性,且最终爬壁机器人是竖直向上爬行的,则腰关节路径需要遵从腰关节半步态的起点和终点关于中心线对称的规则。
本文中的“大学生”是指上大学之前长期生活在农村地区,仅大学期间在城市求学的大专生和本科生群体。本文把“大学生返乡就业创业”定义为大学生大学毕业后或在自己家乡之外某地区工作一段时间后返回原籍(农村地区)寻找就业机会,创立有利于农村地区经济社会发展的事业的过程。所谓“大学生返乡就业创业社会支持要素”,是指在“大众创业、万众创新”背景下,为实现乡村振兴,大学生返乡就业创业,需要政府、高校、家庭等社会主体提供的政策、资金、教育等方面的支持。
因此半步态下腰关节最佳的路径规划满足以下三个条件:①关于模型中心线对称;②在可行域内;③平行于奇异线最远的线段。最终得到半步态下腰关节的规划路径如图8所示。
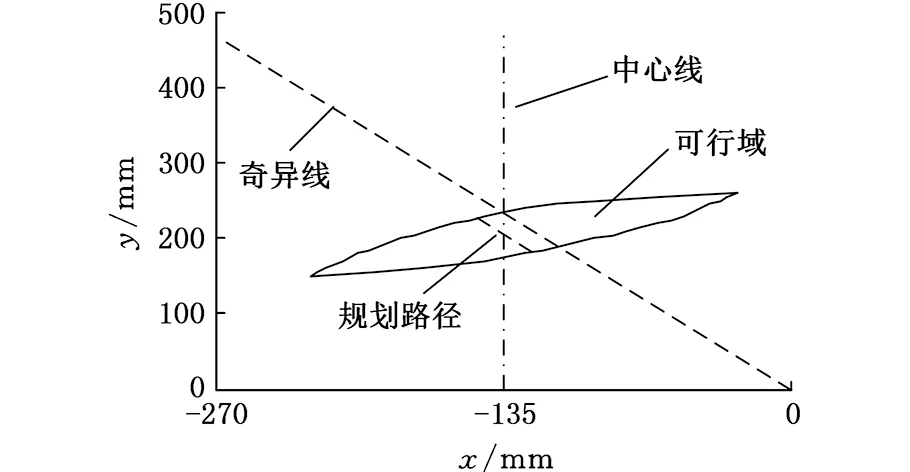
图8 半步态下得到的规划路径
根据上文分析,所得的腰关节规划路径如图9所示。在支撑足位于附着足1时,路径规划如图中实线所示,满足腰关节最佳路径规划的三个条件,具体坐标值参照以上方法由具体样机参数确定;摆动足移动到附着足2处,实现换足支撑,摆动足变支撑足,虚线为换足后的腰关节路径,此路径与实线路径关于模型中心线反对称。此路径规划方法适用于不同的GPL模型的样机参数。

图9 腰关节运动路径
2.4 动力学分析为轨迹规划作准备

图10 动力学模型机构简图
实现路径规划以后,只得到了腰关节运动的一条路径,并不能得到最优的运动速度。同一条路径可以有不同的运动速度形式即不同的运动轨迹,因此需要在动力学分析的基础上进行轨迹规划。当模型处于对足步态攀爬时,动力学模型机构简图见图10。下面将质心等价于腰关节进行讨论。
如图10所示,以后支撑足作为原点建立笛卡儿固定坐标系,腰关节P点坐标为(Px,Py),给定惯性坐标系中的P点坐标(Px,Py)T,映射到广义坐标向量qL=(L1,L2)T,前后足沿移动副向上的方向为正,爬行步态中杆长变量用L1、L2表示,躯体质量为m,躯体绕质心的惯性系数为I,系统总动能为
(13)
重力势能即总势能为
EP=mgPy
(14)
由拉格朗日方程可以得到
(15)
(16)
其中,τ=(FL1,FL2)T为沿移动副方向上的作用力。
动力学模型分析为后期进一步优化轨迹的理论基础。在此较佳路径下,后续分析动力学模型从而得到最优轨迹。
3 ADAMS仿真验证
利用ADAMS对模型进行动力学仿真,验证上述路径规划分析的正确性。对攀爬阶段进行分析,当模型处于对足步态攀爬时,选取三条典型路径进行说明,图11所示为三条典型运动路径,路径均关于中心线对称,腰关节分别从保持一致的运动高度位置、运动频率、纵向运动速度形式等变量,设计不同路径为变量。

图11 三条典型轨迹
通过ADAMS仿真得到对应上支撑足竖直拉力Fy1与时间的曲线,如图12所示。
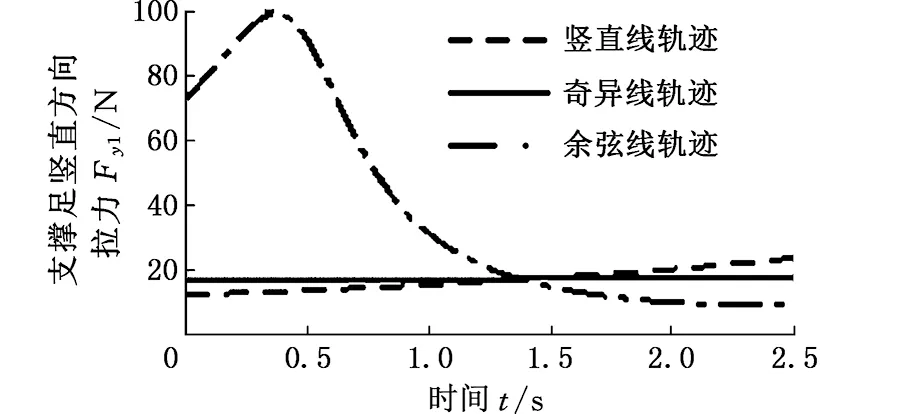
图12 对应轨迹下Fy1曲线
由ADAMS动力学分析结果(图11、图12)对比可得,动力学模型下,路径越靠近奇异线,力越大,依旧可以得到理想轨迹为沿着奇异线轨迹。同时可以看出,沿着奇异线运动,支撑足竖直拉力Fy1曲线比竖直爬行时的曲线更为平缓,验证了壁虎摆动爬行的合理性。
4 结论
(1)结合生物原型运动时腰关节摆动的特点,GPL模型引入了腰关节,更加充分模拟了壁虎的运动形态。
(2)通过对GPL模型的理论分析,推导出了腰关节运动路径与支撑足竖直足端力的关系,得到了腰位置越远离奇异线,足端力越小的规律,并通过仿真验证了这个规律的正确性。
(3)本文提出的方法解决了基于GPL模型的仿生爬壁机器人路径规划问题,并且适用于不同的模型样机参数。
(4)研究结果表明GPL模型攀爬运动时,腰关节摆动爬行比竖直爬行的足端力更小,此结果揭示了壁虎采用摆动爬行而不是竖直爬行的合理性,从仿生出发最终验证了生物运动的合理性。
[1] 肖立,佟仕忠,丁启敏,等.爬壁机器人的现状与发展[J]. 自动化博览, 2005,11(1):407-412. Xiao Li, Tong Shizhong, Ding Qimin, et al. The Present Situation and the Development of Climbing Robot[J]. Automation Panorama, 2005, 11(1):407-412.
[2] Schmitt J, Holmes P. Mechanical Models for Insect Locomotion: Dynamics and Stability in the Horizontal Plane Theory[J]. Biological Cybernetics, 2000, 83: 501-515.
[3] Zheng Y, Wu Y, Tang H. Force Measurements of Flexible Tandem Wings in Hovering and Forward Flights[J]. Bioinspiration & Biomimetics, 2015, 10(1):16-21.
[4] Wang Z, Cai L, Li W, et al. Effect of Slope Degree on the Lateral Bending in Geckos[J]. Bionic Eng., 2015, 12(2):238-249.
[5] Clark J, Koditschek D. A Spring Assisted One Degree of Freedom Climbing Model[J]. Biomechanics and Robotics, 2006,340: 43-64.
[6] Provancher W R, Jensen-Segal S I, Fehlberg M A. Rock: An Energy-efficient Dynamic Wall-climbing Robot[J]. Mechatronics, IEEE/ASME Transactions, 2011, 16: 897-906.
[7] Lynch G A, Clark J E, Lin P C, et al. A Bioinspired Dynamical Vertical Climbing Robot[J]. International Journal of Robotics Research, 2012, 31: 974-996.
[8] Schmitt J, Garcia M, Razo R, et al. Dynamics and Stability of Legged Locomotion in the Horizontal Plane: a Test Case Using Insects[J]. Biological Cybernetics, 2002, 86(5):343-353.
[9] Full R, Koehl M. Drag and Lift on Running Insects[J]. Journal of Experimental Biology, 1993, 176(1):89-101.
[10] Miller B D, Rivera P R, Dickson J D, et al. Running up a Wall: the Role and Challenges of Dynamic Climbing in Enhancing Multi-modal Legged Systems[J]. Bioinspiration & Biomimetics, 2015, 10(2):25-35.
[11] Wang Z, Dai Z, Ji A, et al. Biomechanics of Gecko Locomotion: the Patterns of Reaction Forces on Inverted, Vertical and Horizontal Substrates[J]. Bioinspiration & Biomimetics, 2015, 10(1):16-19.
[12] Wang W, Wang K, Zhang H. Crawling Gait Realization of the Mini-modular Climbing Caterpillar Robot [J].Progress in Natural Science, 2009, 19(12):1821-1829.
(编辑 王艳丽)
A Path Planning for Bionic Climbing Robot Based on GPL Model
Zhu Peihua Wang Wei Li Xuepeng Wu Shilin
Beihang University,Beijing,100191
In order to investigate the path planning problems for bionic climbing robot based on GPL model, a path planning method was proposed. Firstly, the bionic climbing robot based on the GPL model was introduced. And then, the effects of the robot’s path on climbing ability were studied by the kinematics and statics analyses of GPL model. The path planning was realized by minimizing the foot force. Finally, the results were validated by ADAMS simulation. The results show that the method may solve the path planning problems for bionic climbing robot based on GPL model, and explain the rationality of movement model for the gecko adopting swing crawling rather than rectilinear creeping.
gecko inspired mechanism with a pendular waist and linear legs(GPL); climbing robot; path planning; statics analysis; singularity path
2016-02-26
国家自然科学基金资助项目(51475018);北京市自然科学基金资助项目(3162018)
TP242
10.3969/j.issn.1004-132X.2016.24.002
朱佩华,女,1992年生。北京航空航天大学机械工程及自动化学院硕士研究生。研究方向为机器人机构学、机械设计、智能控制。发表论文4篇。王 巍,男,1971年生。北京航空航天大学机械工程及自动化学院教授、博士研究生导师。李雪鹏,男,1988年生。北京航空航天大学机械工程及自动化学院博士研究生。吴士林,男,1988年生。北京航空航天大学机械工程及自动化学院博士。
