油缸直驱式钻机模型自动送钻研究
2017-01-06刘振东张彦廷史明滨黄鲁蒙
刘振东,张彦廷,张 伟,史明滨,王 康,黄鲁蒙
(1.中国石油大学(华东) 石油工业训练中心,山东 青岛 266580;2.中国石油大学(华东) 机电工程学院,山东 青岛 266580;3.中石化石油工程地球物理有限公司 华北分公司,郑州 450000)①
·专题研究·
油缸直驱式钻机模型自动送钻研究
刘振东1,张彦廷2,张 伟3,史明滨2,王 康2,黄鲁蒙2
(1.中国石油大学(华东) 石油工业训练中心,山东 青岛 266580;2.中国石油大学(华东) 机电工程学院,山东 青岛 266580;3.中石化石油工程地球物理有限公司 华北分公司,郑州 450000)①
为加快国内油缸直驱式钻机的研发进程,利用三维造型软件按比例设计了一套油缸直驱式钻机模型及其液压系统,并采用模糊PID控制技术对自动送钻控制系统进行了设计和仿真研究,取得了良好的控制效果,可以满足自动送钻的使用要求。
钻机;自动送钻;模型设计;模糊PID
液压技术在石油钻机上得到了广泛应用。挪威MH公司研制的Ram Rig钻机已形成系列并批量生产,其负载能力1 470~9 800 kN,并利用液压控制技术实现了恒钻压自动送钻,钻井效率提高15~20%[1]。国内石油钻机的液压技术与国外相比差距很大,为此,采用三维造型软件按比例设计了一套油缸直驱式钻机模型,并开展了自动送钻控制研究。
1 油缸直驱式钻机模型
1.1 主要技术参数
油缸直驱式钻机的原型及模型(缩放比例为1∶5)技术参数如表1。
1.2 模型钻机结构
模型钻机主要包括井架、底座、主油缸、顶驱、铁钻工和管子操作系统等,如图1所示。其中主油缸为钻机的核心执行单元。
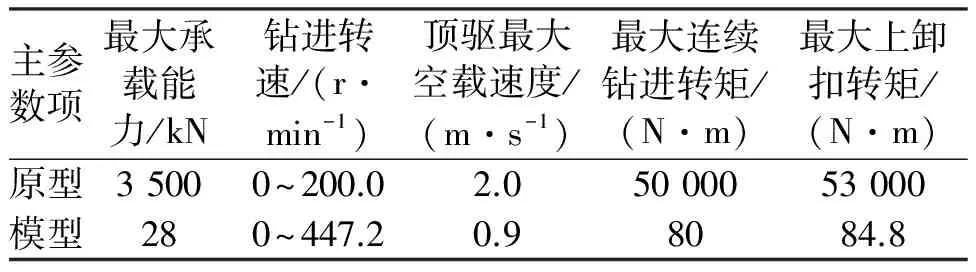
表1 油缸直驱式钻机技术参数
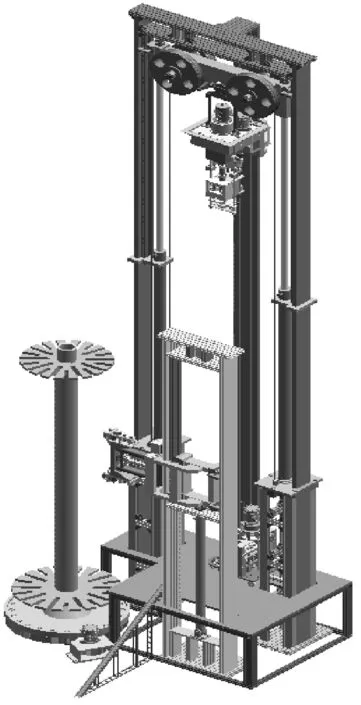
图1 油缸直驱式钻机模型
1.3 主油缸液压系统
主油缸的液压系统原理如图2所示。选用EP型变量柱塞泵,可以通过实时调整泵的输出流量和压力,达到降低能耗的效果;选用2个比例调速阀来控制主油缸,以满足主油缸在不同工况下速度相差大的要求,并达到良好的控制精度。
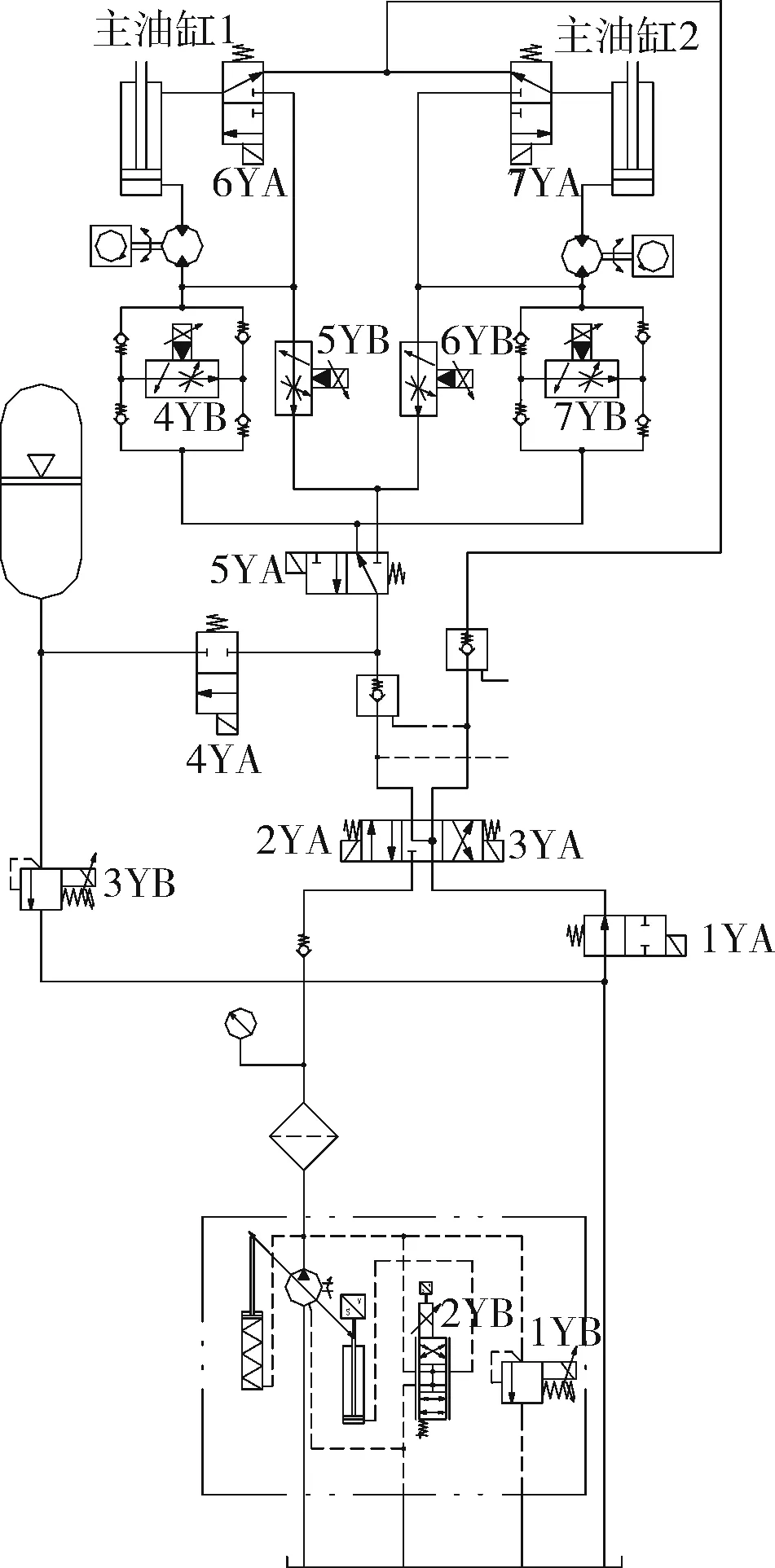
图2 主油缸液压系统原理
2 自动送钻控制原理及方法
2.1 控制原理
自动送钻采用恒钻压方式,控制原理如图3所示。自动送钻时,电磁铁1YA、3YA、4YA和5YA通电,PLC根据主油缸1无杆腔工作压力控制比例电磁铁5YB的阀口开度,实现对主油缸1的速度控制,从而实现实际钻压与目标钻压保持基本相等。
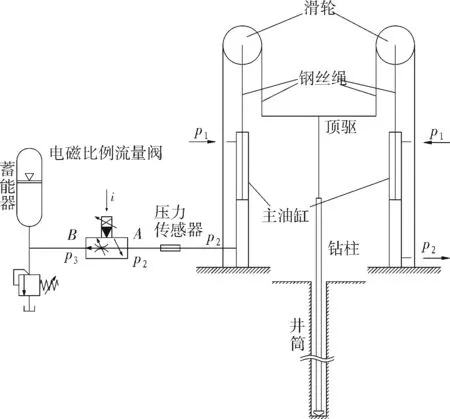
图3 自动送钻控制原理
2.2 控制方法
井底钻压与主油缸无杆腔压力、有杆腔压力和钻具重力的关系为
WZ=(m1+m2)g+p1A1-p2A2
(1)
式中:WZ为井底对钻头的作用力,N;m1为主油缸活动部件的质量,kg;m2为钻具质量,kg;A1和A2分别为主油缸有杆腔、无杆腔工作面积,m2;g为重力加速度,9.8 m/s2;p1和p2分别为主油缸有杆腔、无杆腔工作压力,Pa。
为提高系统控制精度,将钻压控制系统分解为三环控制系统[2],如图4所示。
由内到外,分别为流量、速度和钻压控制回路。为简化算法,采用单元反馈。
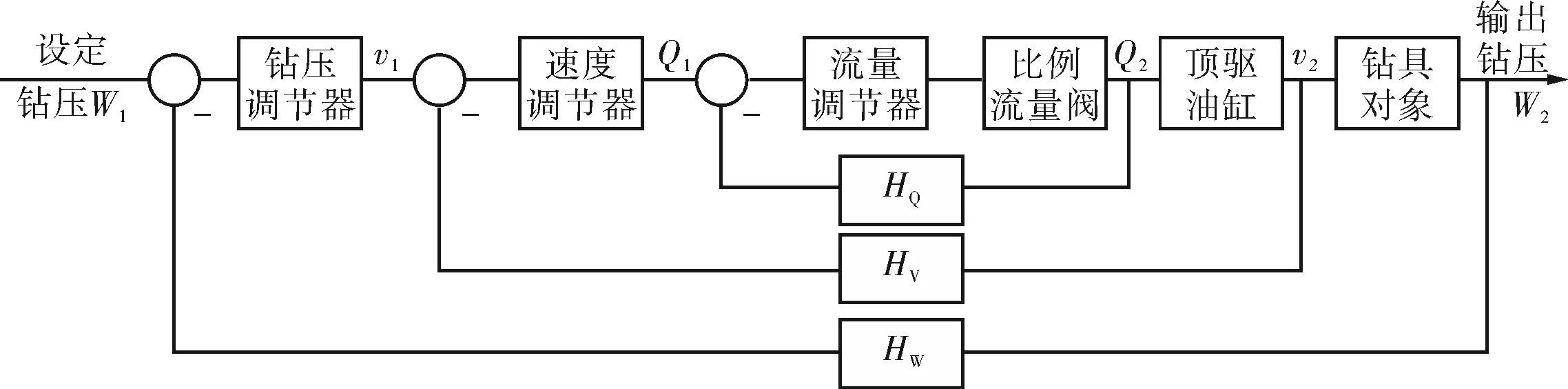
图4 自动送钻控制框图
3 流量控制环设计
比例调速阀原理如图5所示[3]。
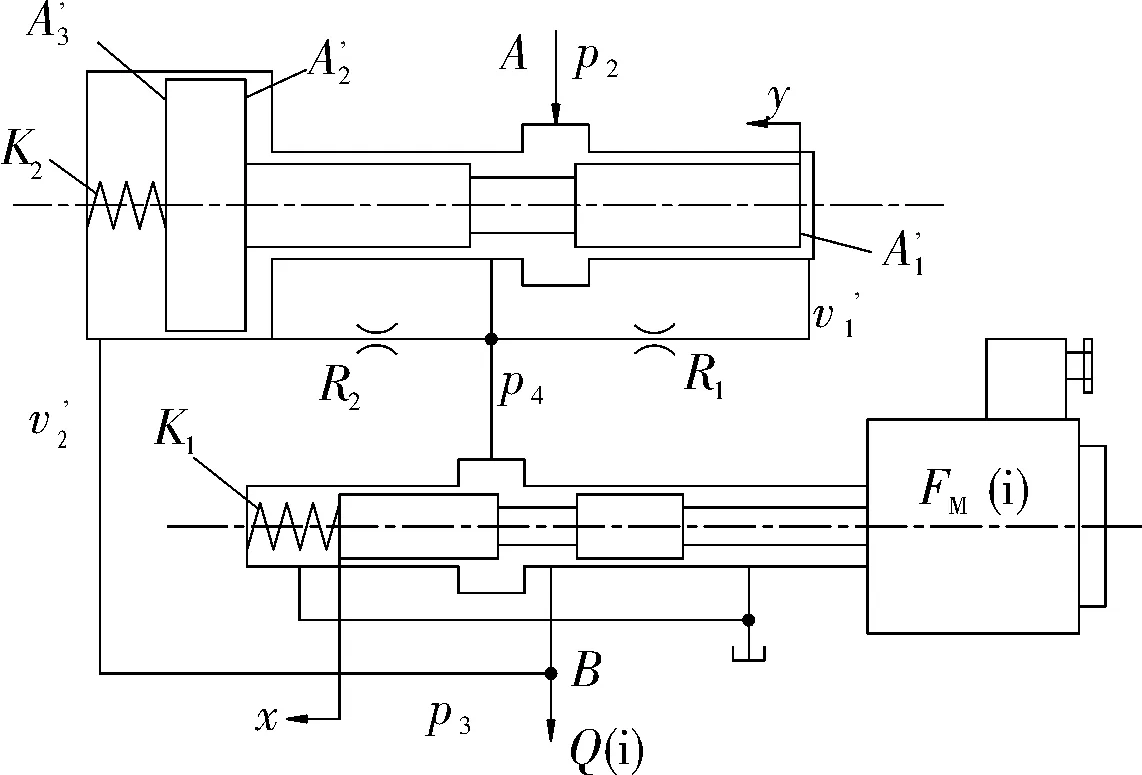
图5 比例调速阀原理
流量控制框图如图6所示。图6中Ka为流量-电流比例系数,I为电流,D(s)为比例电磁铁传递函数,x为阀芯位移,L(s)为从x到调速阀流量的传递函数。

图6 流量环控制框图
3.1 比例电磁铁传递函数
比例电磁铁的输出力动态特性为
(2)
式中:KFi为电流力增益,N/A;fM为电磁滞回力,N;τd为纯延迟时间,s;Fr为库仑摩擦力,N。
比例电磁铁的位移动态特性为
(3)
式中:m、Ks、c分别为等效质量、弹簧刚度和阻尼系数。
对式(2)、(3)进行拉氏变换,并取Fr=0,fM=0,τd=0,得:
(4)
取KFi=175 N/A,m=0.5 kg,Ks=800 N/m,c=500 N·s/m,则比例电磁铁传递函数为
(5)
3.2 位移-流量传递函数
(6)
3.3 流量环传递函数
由式(5)、(6)可得流量控制的开环传递函数为
(7)
流量环闭环采用PID控制方法。
4 速度控制环设计
4.1 油液连续性方程
主油缸无杆腔液压油的连续性方程[4]为
(8)
式中:v为主油缸活塞速度,m/s;q为无杆腔流量,m3/s;βe为液压油体积弹性模量,Pa;Vc为无杆腔容积,m3;Cip为主油缸内部泄露系数,m5/(N·s)。
4.2 活塞动力平衡方程
主油缸活塞运动的力平衡方程[5]为
(m1+m2)g+p1A1-p2A2-WZ-f=
(9)
式中:WZ为钻压设定值,N;f为钻柱所受到的浮力和摩擦力,N;k1和k2分别为油液、钻柱弹簧刚度,N/m;B1和B2分别为主油缸活塞和井筒中钻柱的黏性阻尼系数,kg/s;y为主油缸活塞位移,m。
对式(8)、(9)进行拉氏变换,得:
(10)
4.3 流量-速度传递函数
在自动送钻过程中,难以准确测得F(s)的变化规律,所以取F(s)=0;当送钻速度与钻进速度相近时,钻具变形很小,取k1=k2=0;由于钻进加速度很小,顶驱和钻具的加速度对其影响很小,流量-速度传递函数为
(11)

(12)
4.4 速度环传递函数
速度环控制框图如图7所示。图7中为Kb速度-流量系数,Gv(s)为流量-速度传递函数。

图7 速度环控制方框图
5 钻压控制环设计
目前广泛采用的钻压与钻进速度之间的表达式为修正杨格模式[6]。
(13)
式中:v为钻进速度;K1为岩石可钻性系数;M为门限钻压;Cp为压差影响系数;CH为水力参数影响系数;C2为钻头牙齿磨损系数;n为钻柱转速;h为钻头牙齿磨损量。

v(s)=KWZ(s)-KM(s)
(14)
由于钻井过程中,在各种扰动因素影响下很多参数难以测量,系数不断变化;同时M(s)也在不断变化,无法得到确切的状态方程,为此采用模糊控制。
钻压环控制框图如图8所示。模糊控制器采用单变量二维模糊控制器。

图8 钻压环控制框图
5.1 模糊控制器设计
取钻压误差e的基本论域为[-4,+4]N;ec的基本论域为[-16,+16]N/s。在自动送钻过程中只能实现单向的加速和减速,所以u的论域是非对称的。取主油缸的速度变化范围为[0,0.002 25]m/s,为便于计算,采用增量式,取值[-0.000 4,+0.000 4] m/s。
将e和ec的模糊论域量化为13档,u的模糊论域量化为15档。为提高控制精度,设定e的隶属度函数在零值附近比较集中;解模糊方法采用最大隶属度法,模糊控制规则如表2所示。
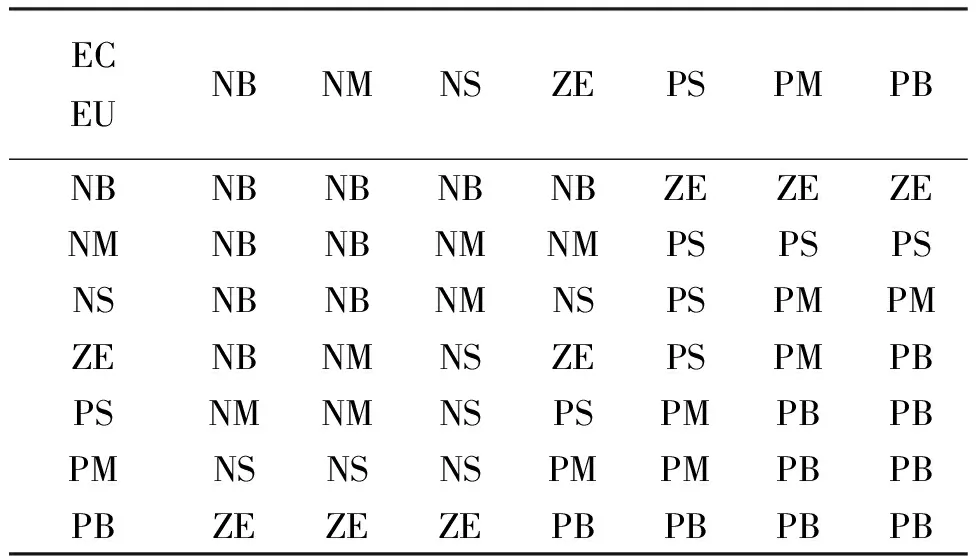
表2 模糊控制规则[2]
5.2 模糊控制系统仿真
控制系统仿真框图如图9所示。
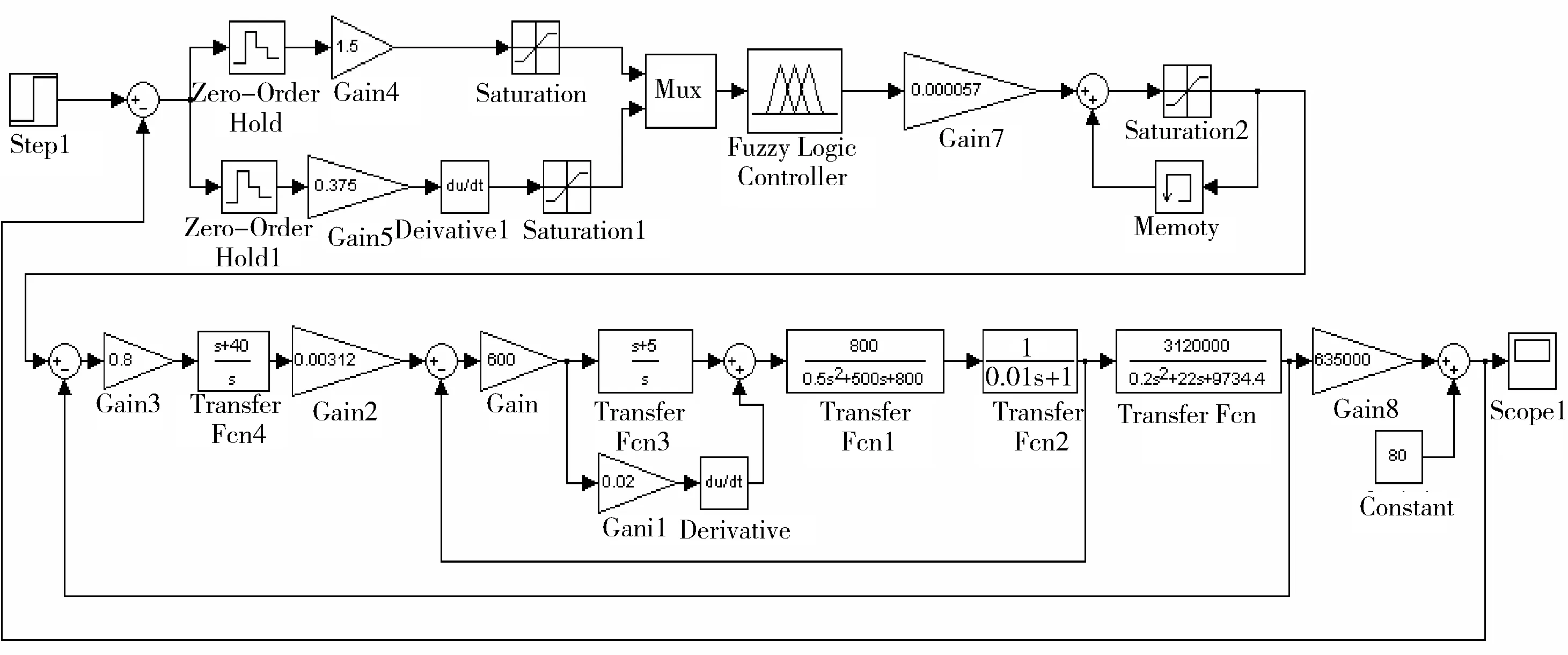
图9 系统仿真框图
流量环取Kp=600,tI=0.2,tD=0.02;速度环取Kp=0.8,Ki=0.025;压力环1/K为6.35×105N·s/m,M为85 N,WZ为1 650 N。系统阶跃响应曲线如图10所示。
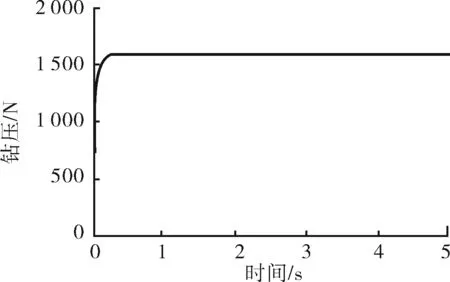
图10 系统阶跃响应曲线
由图10可见:系统未出现超调现象,稳态误差为0.31%,调整时间为0.32 s,能够快速达到稳定状态并保持,满足自动送钻控制要求。
6 结论
1) 利用三维造型软件按比例设计了一套油缸直驱式石油钻机模型,并完成了液压系统设计。
2) 针对该钻机油缸直驱式的特点,建立了自动送钻控制系统的数学模型;采用模糊PID控制技术对流量环、速度环和压力环通过Simulink进行了仿真,取得了理想的控制效果,为油缸直驱式钻机的研制及其自动送钻控制提供了一定的技术参考。
[1] 张连山.国外液压驱动石油钻机的新进展[J].石油机械,2000,28(2):52-54.
[2] 高岩.石油钻机自动送钻智能控制系统[D].西安:西安建筑科技大学,2004.
[3] 吴根茂,邱敏秀,王庆丰.实用电液比例技术[M].杭州:浙江大学出版社,1993.
[4] 李永堂,雷步芳,高雨茁.液压系统建模与仿真[M].北京:冶金工业出版社,2003.
[5] 李延龙.液压驱动柱塞泵比例控制若干问题的研究[D].东营:中国石油大学(华东),2006.
[6] 郭学增.最优化钻井理论基础与计算[M].北京:石油工业出版,1987.
Automatic Drill Research of Hydro-cylinder Direct-drive Rig Model
LIU Zhendong1,ZHANG Yanting2,ZHANG Wei3,SHI Mingbin2,WANG Kang2,HUANG Lumeng2
(1.Petroleum Industry Training Center,China University of Petroleum,Qingdao 266580,China;2.CollegeofMechanicalandElectricalEngineering,ChinaUniversityofPetroleum,Qingdao266580,China;3.HuabeiBranch,SinopecGeophysicalCorporation,Zhengzhou450000,China)
In order to speed up the research process of hydro-cylinder direct-drive rig in domestic,a 3D modeling software is used to design a set of hydro-cylinder direct-drive rig model,to design the hydraulic system,and fuzzy PID control technology is used to design automatic drilling control system,the simulation shows the result is good,and can satisfy the requirement of automatic drilling.
rig;automatic drilling;model design;fuzzy PID
1001-3482(2016)12-0001-05
2016-06-06
中国博士后科学基金资助项目(2016M592269);青岛市博士后资助项目(2015253)
刘振东(1982-),男,山东单县人,工程师,博士研究生,主要从事陆地和海洋石油钻井装备的研发工作,E-mail:liuzd28@upc.edu.cn。
TE928
A
10.3969/j.issn.1001-3482.2016.12.001