基于多智能体的城市道路短时交通流预测与仿真研究
2017-01-06徐建川陈晓利李远哲
朱 湧,徐建川,陈晓利,李远哲
(1.招商局重庆交通科研设计院有限公司, 重庆 400067; 2.重庆市公安局渝北区分局交通巡逻警察支队, 重庆 401120)
基于多智能体的城市道路短时交通流预测与仿真研究
朱 湧1,徐建川2,陈晓利1,李远哲1
(1.招商局重庆交通科研设计院有限公司, 重庆 400067; 2.重庆市公安局渝北区分局交通巡逻警察支队, 重庆 401120)
针对目前短时交通流预测模型中城市道路交叉口群交通流预测结果波动性大的问题,基于多智能体理论,提出一种新的城市道路短时交通流预测方法。该方法包括建模、预测算法和仿真等,首先对城市道路交通要素进行多智能体建模,建立多智能体交通流预测体系结构;然后基于非线性时间序列预测法提出多智能体模型下的改进算法;最后在NETLOGO环境下进行仿真试验。试验结果表明:该方法预测结果较传统方法的预测结果有一定改善,预测误差变化更为平稳。
多智能体;交通流预测;城市交通;智能交通;交通仿真
随着社会经济的发展和汽车保有量的迅速增加,城市道路交通拥堵、交通事故等问题日益严重,交通问题已成为制约城市发展的瓶颈。因此,如何更好地减少交通拥堵,提高交通效率,降低环境污染,便成为目前研究的热点。要想解决城市道路交通问题,一方面需要通过新建道路资源、改造交通设施、优化路网结构等方式来实现;另一方面,需要通过智能化的交通管理与控制手段来提高现有道路交通的运行效率。通常,交通诱导和控制是提高交通运行效率的重要手段之一,而交通流预测则是交通诱导与控制手段中必不可少的条件[1]。
目前,虽然道路交通数据采集设备不断完善使得交通流状态的快速处理成为可能,但相对于城市规模的迅速扩展、车辆的急剧增多而言,传统交通流预测方法已逐渐难以满足海量数据分析、处理等实际应用需求[2]。随着国内外研究者对多智能体(Multi-agent)技术研究的深入,分布式多智能体的模块性、易于扩展性和灵活性等特点为解决城市道路交通管理与交通流预测问题提供了新的思路[3],如Burmeister[4]基于多智能体研究交通设施间的协作关系,提出了多智能体在交通运输中应用的方法;Roozemond[5]分析了多智能体、神经网络和分布式人工智能在城市交通控制中的应用前景和价值;张晋[6]对城域混合交通仿真系统的体系结构等进行了研究。本文针对目前城市道路交通流预测的问题,研究基于多智能体的城市道路短时交通流预测算法,为城市交通控制与诱导策略提供数据支持。
1 城市道路交通要素多智能体建模
1.1 路网智能体模型
路网模型由2种基本的Agent(智能体)组成,即路口Agent和路段Agent。路口Agent是交通信号控制机、路口交通流检测设备和路口交通流情况的抽象表述;路段Agent是路段交通流检测设备和路段交通流情况的抽象表述。对路口、路段Agent的监控是分析路网交通流量,实施交通诱导与控制的重要途径。
路口Agent具有本路口及其所连接路段的交通信息,各个方向的交通流在此汇聚,并形成车辆分流冲突等交通现象,交通拥挤主要发生在路口。因此,路口Agent是整个城市道路交通控制系统中最基本、最主要的部分,是实现交通控制任务的主要承担者。路口Agent可从检测设备得到实时交通状态信息,其可作为推理决策的数据;也可将本路口的交通信息实时通知给其相邻路口或区域控制中心,并可根据需要完成控制中心下达的控制工作,即通过对本路口的交通信号灯以及来往车辆的属性、行为特性进行路口交通流量的优化控制。路口Agent的特性如表1所示。
路段Agent具有本路段及其所连接路段的交通信息。路段建模目的是为了获得路段交通流的实时信息,并通过控制手段使路段上的流量保持在一定范围内。路段Agent的特性如表2所示。
由多个路口Agent、路段Agent构成了路网Agent,其模型如图1所示。
1.2 车辆智能体模型
为了便于分析研究,本文将车辆Agent视为车辆和驾驶员实体的统一模型。作为反映城市道路系统的主要交通元素,机动车辆是交通系统中活动频繁且最重要的,是高度自治的主体。它可自动获取外界环境的信息,拥有自己的知识和复杂的决策判断能力,并可根据周围的交通情况实时调整车辆Agent自身的驾驶行为。车辆Agent的特性如表3所示。

表1 路口Agent特性

表2 路段Agent特性
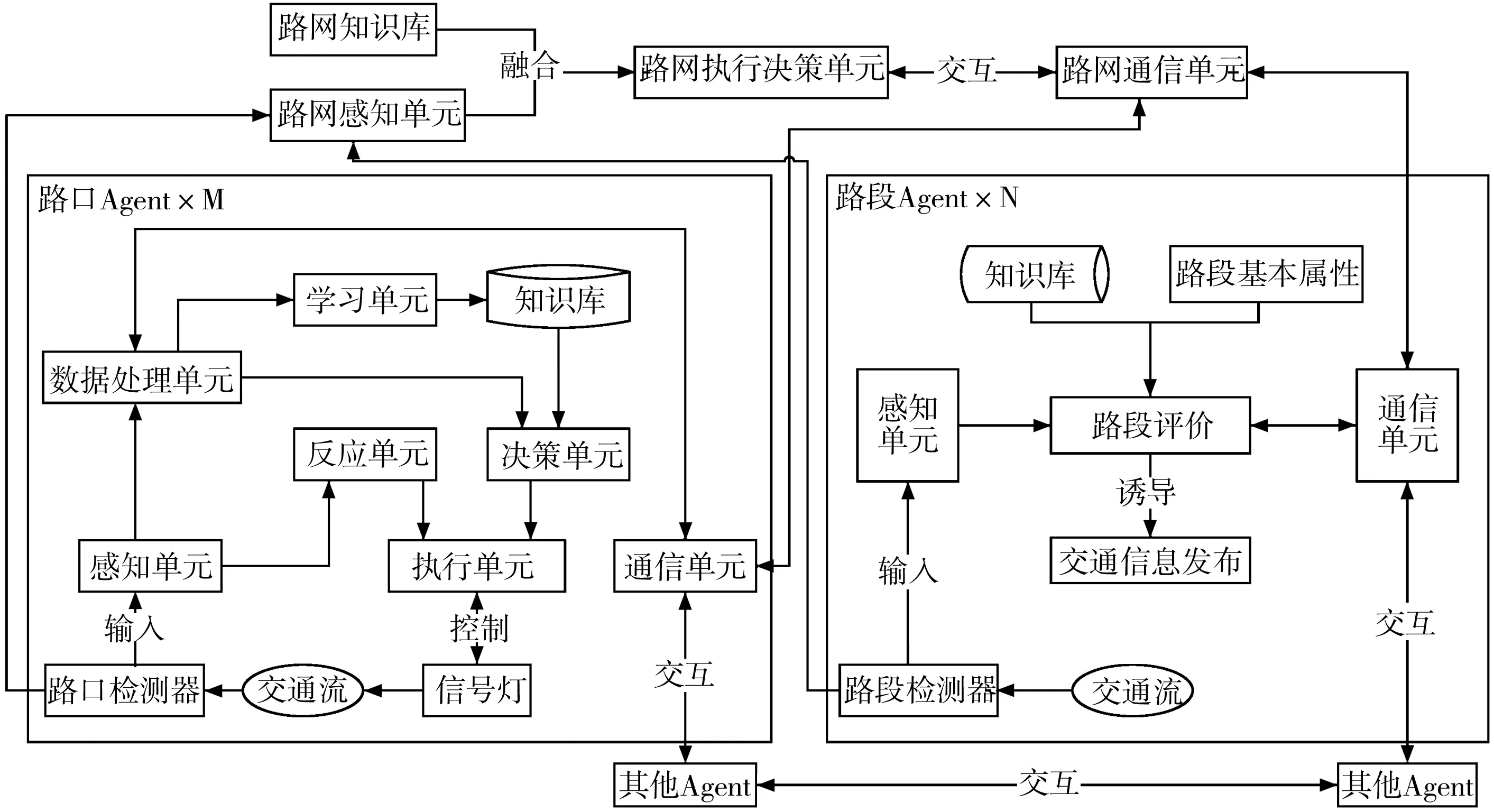
图1 路网Agent结构模型
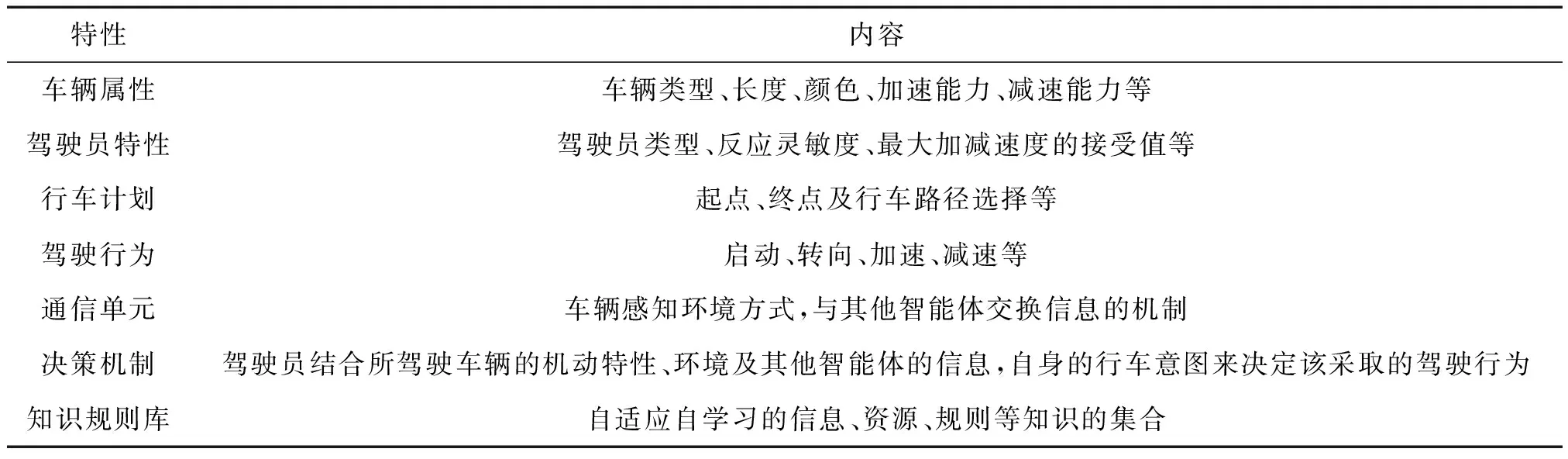
表3 车辆Agent特性
为了合理反映表3中车辆Agent的特点,本文基于理性智能体的BDI模型[7]来构建车辆智能体模型,其结构如图2所示。用信念(Belief)、愿望(Desire)、意向(Intention)这3个心智状态(BDI)分别表示车辆Agent的信息特性、动机特性和决策特性。信息特性反映Agent属性、当前的状态。动机特性指Agent受外部、内部的激发而想要达到的状态,分为当前期望状态和长远期望状态,当前期望状态包括超车、换道等,长远期望状态包括行车计划等。决策特性指Agent根据自己的意图以及从外界获得的信息智能地决策下一步的行动,决策过程即驾驶员的决策机制,决策结果即驾驶行为。通信机制确保Agent能感知环境及其他智能体的状态,并把自身对环境和其他智能体的影响传达给环境和相应的Agent,是车辆Agent必不可少的组成部分。
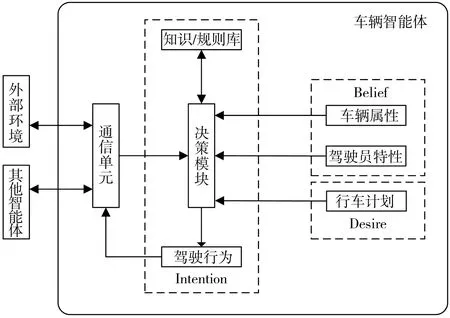
图2 车辆Agent结构模型
2 多智能体交通流预测体系结构
根据交通流预测和判别系统的特点,建立了多智能体交通流预测体系结构,如图3所示。该结构包含支持层、应用层和接口层的层次结构。其中,支持层主要包含各类信息资源,如自然资源、人工信息、流量信息以及专家知识等。应用层包括各个路段Agent和交通区域预测Agent,在交通流预测系统中路段Agent的相关功能被分解为信息Agent、分析Agent和集成Agent,交通区域预测Agent包含交通流预测Agent、管理Agent以及交互Agent,相关的预测与判别信息经过交互Agent供车辆Agent查询和学习使用,以辅助实现对车辆的诱导功能。接口层在系统中充当人机交互界面的角色,应用层是整个系统的核心,支持层为整个系统提供信息来源。
基于多智能体的交通流预测系统是一个典型的分层递阶控制系统,同一区域的各路段Agent在组织形式上是相互平等的,且受交通区域预测Agent的统一管理;各交通区域预测Agent在整个系统结构中的作用也是平等的,同时受交通流预测系统全局规划Agent的管理,且不同区域预测的数据结构与组织形式可以接受全局规划Agent的不同交通流预测策略,即实现分布式预测,从而可使整个系统结构具有集中式与分布式的协调效果。
3 基于多参数时间序列的短时交通流预测改进算法
根据交通流预测原理的不同,短时交通流预测方法研究主要可分为基于统计的方法、神经网络法、非线性系统时间序列法、动态交通分配以及组合预测法等[8-12]。在基于多智能体的城市交通系统研究中,为使路网智能体具备短时交通流预测功能,根据交通系统功能Agent的划分,应使相关交通区域中路段预测Agent对相关路段交通流量具备短时预测功能,同时,由交通流预测Agent得到的交通流量预测信息可供本路段以及其他路网Agent和车辆Agent使用,以便及时合理地进行交通状态判别。为了兼顾系统的实时性及有效性,本文基于时间序列预测模型,提出多参数时间序列指数平滑改进方法,其用于预测下一时刻目标区域路段交通流量。本文预测时间间隔为5 min。
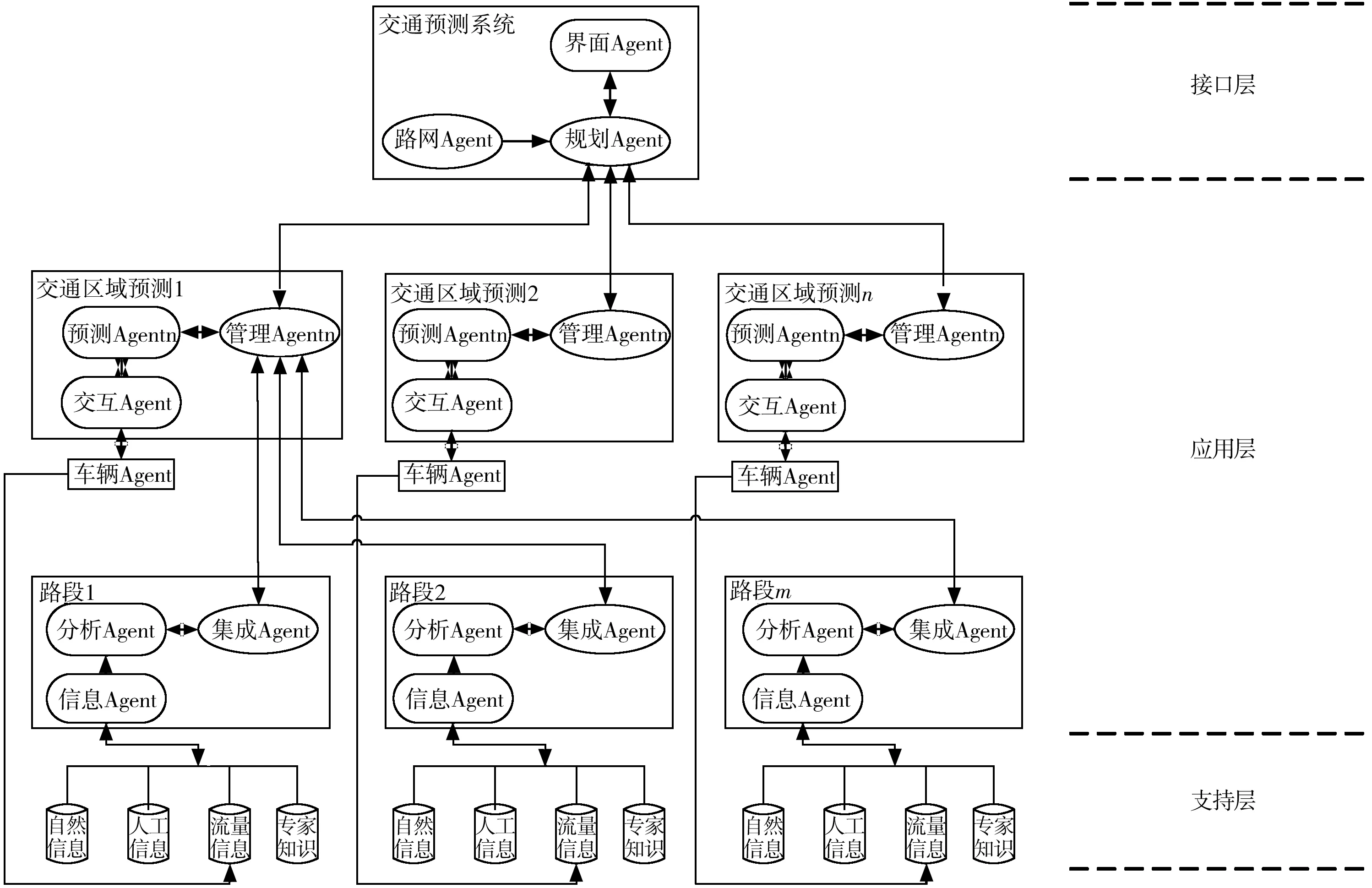
图3 多智能体交通流预测体系结构
设路段Agent测得的历史交通流数据序列由x1,x2…,xt…,xn组成,3次指数改进平滑法公式为:
(1)
(2)

(3)
故预测Agent的多参数时间序列改进模型可以描述为:
(4)
在NETLOGO平台下,利用各交通智能体的交互行为对改进模型进行预测,其仿真步骤如下:
步骤1:初始化1、2和3次指数平滑法的平滑系数以及平滑初始值;
步骤2:路段Agent与车辆Agent交互获取当前时刻道路上的车辆编号、位置和行驶方向信息;
步骤3:路段Agent统计车辆信息并获取当前时刻道路的交通流量xt;



步骤7:更新时间,重复步骤2进行下次时刻的交通流预测。
4 仿真试验
交通系统是一种开放性、随机性和自适应性的复杂动态系统,而多智能体模型是一种研究社会、生态等复杂系统的动态研究方法,因此,通过多智能体仿真能够有效推演出整体交通系统的一些复杂行为[13]。本文在NETLOGO环境下,利用Traffic Grid模块编写了基于多智能体的城市道路交通流预测仿真平台,并以此为基础建立了一个典型多交叉口城市交通路网进行仿真试验。试验时,数据输入为现实环境交通流调查数据,仿真假设车辆到达服从泊松分布,交叉口为四相位控制,短时预测时间间隔设定为5 min。为便于分析不同预测算法模型的交通流预测效果,仿真系统提供了数据观察分析窗口以用于综合比较一个路段智能体在不同预测算法下的预测水平。本文试验比较了神经网络预测法、移动平均法、指数平滑法和本文算法的交通流预测效果。仿真环境中某一节点不同预测算法的预测结果如图4所示,不同预测方法的误差分析对比如表4所示。
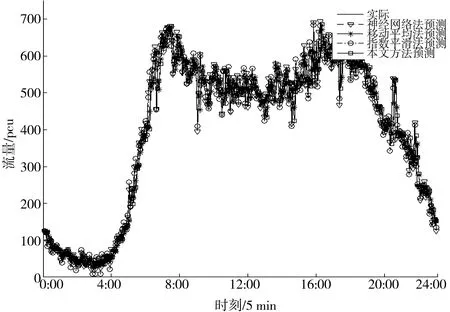
图4 仿真环境中某一节点24 h的短时交通流预测结果(5 min)
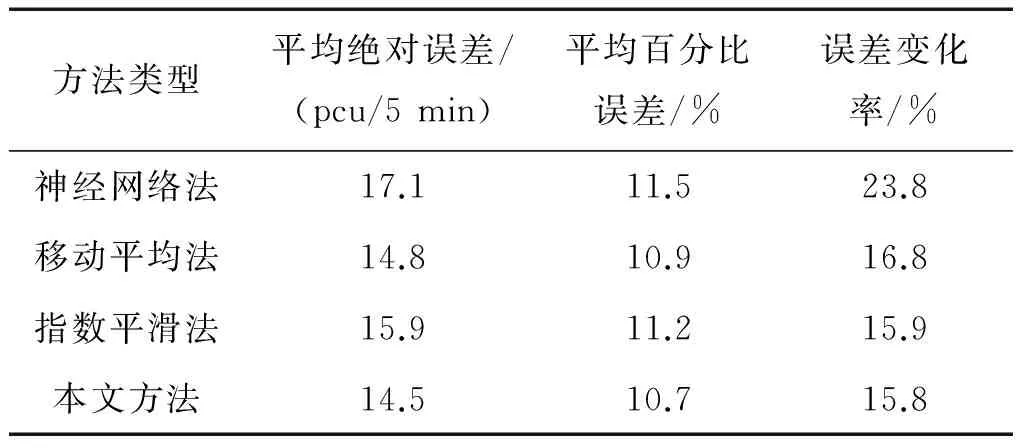
方法类型平均绝对误差/(pcu/5min)平均百分比误差/%误差变化率/%神经网络法17.111.523.8移动平均法14.810.916.8指数平滑法15.911.215.9本文方法14.510.715.8
从图4和表4可以看出,神经网络基本能够预测交通流状态的变化,但由于神经网络预测规律是基于数据驱动的黑箱模型,故其预测效果水平跳跃性较大,预测误差较其他方法有时相对较大,预测不够平稳;移动平均预测方法预测的滞后性相对较大,在交通流量平稳变化时预测效果较好;指数平滑法效果介于神经网络法和移动平均法之间;而相较于移动平均法,本文算法预测误差变化相对平稳,预测滞后性有所改善,预测变化曲线响应实时交通流的效果相对较好。
5 结束语
智能交通管理与控制系统目前已成为应对城市道路交通问题的有效手段,城市道路交通流的短时精确预测是城市交通控制与诱导的关键。本文研究了多智能体与交通要素间的关系,针对交通系统中的重要组成部分(路段、路口、车辆等)建立了智能体模型,构建了多智能体交通流预测体系结构,提出了基于多参数时间序列的多智能体交通流预测算法,并通过仿真试验验证了算法的有效性。
由于交通系统存在时滞性、非线性、随机性、离散型等复杂性的特点,交通流数据采集难免会出现各种偏差或缺失,故对原始交通数据预处理方法还有待进一步研究,以提高交通流预测的准确性。
[1]陆海亭,张 宁,黄 卫,等.短时交通流预测方法研究进展[J].交通运输工程与信息学报,2009(4):84-91.
[2]吴 波,徐志广,王 峰,等.基于传感器网络的智能交通系统架构及关键技术[J].公路交通技术,2014(3):126-130.
[3]俞 峥,李建勇.多智能体在交通控制系统中的应用[J].交通运输工程学报,2001(1):55-57.
[4]张 晋,李 平,王 慧.基于多智能体的城域混合交通仿真系统的体系结构[J].复杂系统与复杂性科学,2004(3):82-88.
[5]BURMEISTER B,HADDADI A,MATYLIS G. Application of multi-agent systems in traffic and transportation[J]. IEE Proceedings - Software Engineering,1997,144(1):51-60.
[6]DA ROOZEMOND,P VEER.Usability of intelligent agent systems in urban traffic control[J].Application of Artificial Intelligence in Engineering,1998 (4):15-18.
[7]AS RAO,MP GEORGEFF.Modeling Rational Agents within a BDI-Architecture[J]. International Journal of Environmental Studies,1970,59(1):171-172.
[8]张 扬.城市路网交通预测模型研究及应用[D].上海:上海交通大学,2009.
[9]HONGFEI J,MING T,ZHONGXIANG H,et al.An improved method of short-term traffic Prediction[C]//11th Intemational Conference on Urban Transport and the Environrnent in the 21st Century. Algarve:WIT Press,2005:649-658.
[10]ABDULHAI B,PORWAL H,REEKER. Short-term traffic flow prediction using neural gnetic Algorithrns[J].ITS Joumal,2002,7(1):3-41.
[11]韩 超.基于时间序列分析的短时交通流量实时自适应预测[D].北京:北京工业大学,2004.
[12]宫晓燕,汤淑明.基于非参数回归的短时交通流量预测与事件检测综合算法[J].中国公路学报,2003,16(l):52-56.
[13]尹全军,杜湘瑜,张 琦,等.基于HLA的智能Agent仿真环境研究[J].系统仿真学报,2005(4):875-878.
Study on Short-Term Traffic Flow Forecast and Simulation of Urban Road Based on Multi-Agent Theory
ZHU Yong1,XU Jianchuan2,CHEN Xiaoli1,LI Yuanzhe1
Due to large fluctuation of urban road cross traffic flow forecast in short term traffic flow forecast model,a new short-term traffic flow forecasting method for urban road is proposed in this paper based on multi-agent theory. This method includes modeling,forecast algorithm and simulation,etc. Firstly,this paper carries out multi-agent modeling for urban road traffic factors,so to set up a multi-agent traffic flow forecasting system; Then,an improved algorithm upon multi-agent model is proposed based on nonlinear time series forecasting method. Finally,the simulation is carried out in NETLOGO environment. The results show that the forecast results of this method are better than those of the traditional method,and the forecast error variation is more stable.
multi-agent; traffic flow forecast; urban communications; intelligent traffic; traffic simulation
10.13607/j.cnki.gljt.2016.06.029
科技部转制科研院所创新能力专项(2014EG124042);重庆市社会事业与民生保障科技创新专项(cstc2015shms-ztzx30014)
2016-08-26
朱 湧(1989-),男,江西省赣州市人,硕士,工程师。
1009-6477(2016)06-0135-06
U491.1+12
A