一种高效抗差卡尔曼滤波的导航应用
2017-01-05彭月
彭 月
(四川省测绘地理信息局 西南测绘职工培训中心,四川 成都 610100)
一种高效抗差卡尔曼滤波的导航应用
彭 月
(四川省测绘地理信息局 西南测绘职工培训中心,四川 成都 610100)
针对目标导航定位中传统卡尔曼滤波结果易受运动模型误差影响的问题,提出一种高效抗差卡尔曼滤波方法:以卡尔曼滤波中目标位置参数的预测状态不符值的标准化残差作为抗差判断量,对当前运动模型的准确程度进行自适应判断;进而确定是否利用运动模型的预测信息进行滤波。实验结果表明:在复杂的运动环境中,该方法能够有效抵抗运动模型误差。
抗差卡尔曼滤波;运动模型误差;预测状态不符值;标准化残差
0 引言
卡尔曼滤波方法应用在动态导航中时,需要有准确的运动模型才能保证滤波精度[1-2]。关于目标运动模型,国内外学者分别提出了匀速模型、匀加速模型、时间相关模型、“当前”统计模型等[3-5]。目前,单一的运动模型无法完全准确地描述实际中所有机动情况;当运动模型与目标机动情况差异较大时,使用传统卡尔曼滤波方法将导致定位精度不理想[6]。
卡尔曼滤波方法中,运动模型的准确程度体现于预测状态不符值[7]。为了抑制运动模型误差,本文根据卡尔曼滤波中目标位置参数的预测状态不符值的标准化残差实现自适应抗差滤波。
1 卡尔曼滤波
卡尔曼滤波由状态方程和观测方程组成[1],即:
Xk=φk,k-1Xk-1+Wk;
(1)
Lk=AkXk+ek。
(2)
式中:Xk为tk时刻的状态向量;Xk-1为tk-1时刻状态估计向量;φk,k-1为状态转移矩阵;Wk为状态模型噪声;Lk为观测向量;Ak为观测设计矩阵;ek为观测噪声。

2 抗差卡尔曼滤波
2.1 抗差卡尔曼滤波原理
卡尔曼滤波中,按照不同的求解准则可以得到不同的滤波解[8]。若运动模型较准确,则预测的状态信息可信度较高,应选择传统滤波求解准则为

(3)

(4)

(5)
当运动模型不适合目标的机动情况时,预测状态信息误差较大,如不作抗差处理,其定位精度会急剧降低[9]。针对运动模型误差,业界主要有2种处理方式:一种是调整运动模型[10];另一种是增加状态模型噪声[7]。论文提出一种简单高效的抗差处理方法:当判断量判断出运动模型误差较大时,直接忽略运动模型预测信息。这其实是增加状态模型噪声方法的一种特例,相当于将状态模型噪声增加到无穷大。忽略运动模型预测信息,建立抗差滤波求解的准则为
(6)
2.2 抗差判断量


(7)

(8)
以各历元的标准化残差向量的绝对值均值aver作为为抗差判断量,即

(9)
当aver小于阈值时,说明滤波所使用的运动模型与实际机动情况相符,则选择传统滤波求解准则;否则,选择抗差滤波求解准则。另外,当k=1时选择抗差滤波求解准则。本文实验中,阈值取1。
3 实测与结果分析
车辆在路段复杂的市区内行驶,车载GPS接收机的采样间隔Δt为1 s。采用扩展卡尔曼滤波方法[11-12],利用测距码伪距定位、多普勒频率定速[12-13];以高精度的加权最小二乘伪距定位轨迹作为接收机的参考轨迹。其中加权最小二乘伪距定位是依据卫星高度角调整卫星数据的权值,从而得到高精度定位轨迹[14]。
3.1 观测方程

(10)
式中:ρju为经过误差改正后卫星j到用户u的伪距;Rj为卫星j到用户u近似位置的距离;vj为修正后的伪距误差;(Δxu,Δyu,Δzu)为用户位置改正量;Δbu为钟差改正量。
利用多普勒频率定速,将式(10)对时间求导,得

(11)
综合式(10)和式(11),求出观测方程,形如
V=AX-L。
(12)
3.2 状态方程
卡尔曼滤波所使用的模型为匀加速模型,则其状态方程为

(13)
其中:

(14)

(15)
3.3 实验结果
分别对接收机观测数据进行传统卡尔曼滤波和本文提出的抗差卡尔曼滤波,并将滤波定位轨迹分别与参考轨迹比较,其x、y方向的对比结果见图1、图2,定位偏差见图3、图4;坐标分量方向上各历元定位偏差的均值和标准差见图5和图6。
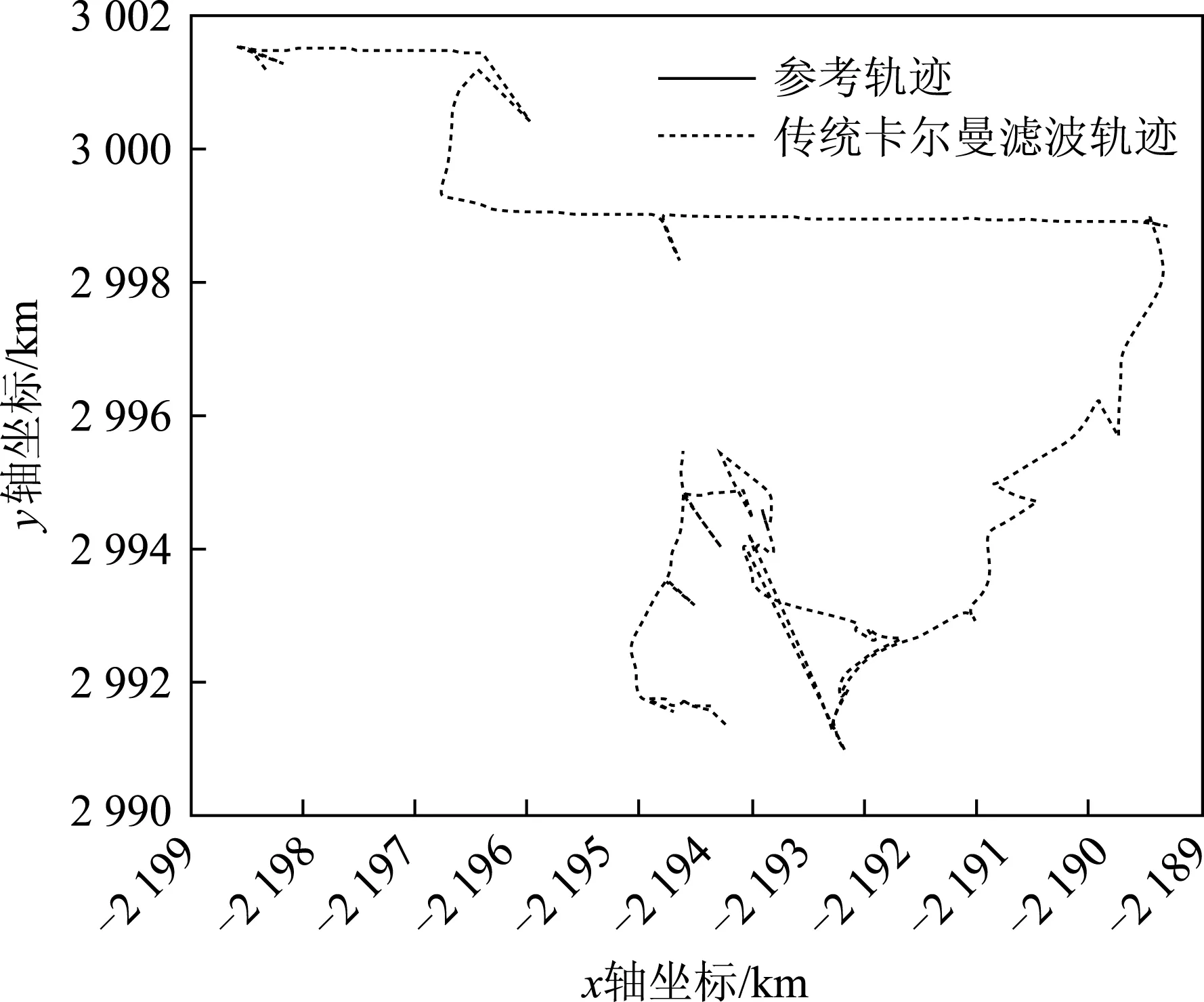
图1 传统卡尔曼滤波轨迹

图2 抗差卡尔曼滤波轨迹
3.4 结果分析
对比分析图1~图4可知:抗差卡尔曼滤波方法的定位精度比传统卡尔曼滤波要高,其跟踪轨迹基本吻合参考轨迹;而传统卡尔曼滤波方法在滤波过程中出现多次滤波发散的现象,定位偏差较大。分析图5和图6可知:抗差卡尔曼滤波轨迹与参考轨迹的定位偏差的均值在m级,标准差的差在10 m内;而传统卡尔曼滤波轨迹的定位偏差均值达到了3 m以上,标准差达到80 m。因此相比于传统卡尔曼滤波,抗差卡尔曼滤波具有良好的抗差效果,鲁棒性较强。

图3 传统卡尔曼滤波xy方向误差

图4 抗差卡尔曼滤波xy方向误差

图5 2种滤波方法的定位偏差均值

图6 2种滤波方法的定位偏差标准差
另外,由图4发现,抗差卡尔曼滤波在个别观测历元也出现了几十米的定位偏差,这是由于观测误差引起的。车辆在市区的行驶轨迹极为复杂,多路径误差较严重,且易出现接收机信号失锁的情况;这些都会导致出现较大的观测误差。卡尔曼滤波同时受到运动模型误差和观测误差的影响[15]。本文所提出的抗差滤波方法能有效抵抗运动模型误差,但对观测误差的作用不明显;因此在观测误差较大时,该抗差滤波也会出现较大定位偏差。
4 结束语
本文提出的抗差卡尔曼滤波利用位置状态参数预测状态不符值的标准化残差自适应抗差;相比于传统卡尔曼滤波,该方法能简单有效地抵抗运动模型误差,具有鲁棒性较强、算法简单有效的特点,适用于复杂的运动场景。需要指出的是,该抗差卡尔曼滤波方法的缺点是抵抗观测误差的效果不理想。如何同时有效地抑制运动模型误差和观测误差对滤波结果的影响,是下一步需要研究的问题。
[1] 杨元喜,任夏,许艳.自适应抗差滤波理论及应用的主要进展[J].导航定位学报,2013,1(1):9-15.
[2] 杨元喜.自适应动态导航定位[M].北京:测绘出版社,2006:69-70.
[3] 王宏强,黎湘,刘丹,等.非线性系统中的机动目标跟踪算法[J].国防科学技术大学学报,2002,24(4):57-60.
[4] ZHOU Hongren,KUMAR K.A “current” statistical model and adaptive algorithm for estimating maneuvering targets[J].AIAA Journal,Guidance,Control and Dynamics,1984,7(5):1102-1106.
[5] LI Rong,VESSELIN P.Survey of maneuvering target tracking.Part I:Dynamic Models[J].IEEE Transactions on Aerospace and Electronic Systems:2003,39(4):1333-1362.
[6] 吴富梅,杨元喜.一种两步自适应抗差Kalman滤波在GPS/INS组合导航中的应用[J].测绘学报,2010,39(5):522-523.
[7] 吴富梅,杨元喜,崔先强.利用部分状态不符值构造的自适应因子在GPS/INS紧组合导航中的应用[J].武汉大学学报·信息科学版,2010,35(2):156-157.
[8] KAY S M.统计信号处理基础-估计与检测理论(卷I、卷II合集)[M].罗鹏飞,张文明,刘忠,等译.北京:电子工业出版社,2014:289-311.
[9] 杨元喜,吴富梅.临界值可变的抗差估计等价权函数[J].测绘科学技术学报,2006,23(5):317-320.
[10]罗笑冰.强机动目标跟踪技术研究[D].长沙:国防科学技术大学,2007:15-23.
[11]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:152-153.
[12]何海波,杨元喜,孙中苗.GPS多普勒频移测量速度模型与误差分析[J].测绘学院学报,2003,20(2):79-82.
[13]袁爱裕,秦红磊.UKF在GPS/INS伪距、伪距率组合导航中的应用[J].雷达科学与技术,2009,7(1):59-64.
[14]李春华,蔡成林,梁愈高,等.一种高精度的北斗伪距单点定位加权算法[J].测绘科学,2015,40(9):33-38.
[15]YANG Yuanxi,GAO Weiguang.Comparison of two fading filters and adaptively robust filter[J].Geo-spatial Information Science,2007,10(3):200-203.
Application of an efficient robust Kalman filtering in navigation
PENG Yue
(Southwest Employee Training Center of Surveying and Mapping,Sichuan Bureau of Surveying Mapping and Geoinformation,Chengdu,Sichuan 610100,China)
Aiming at the problem that the traditional Kalman filter is easily affected by the error of motion models,the paper proposed a robust method of Kalman filter which can resist the motion model error efficiently.It used the standardized residuals of the predictive position state errors as judgment for anti-error of the motion model,whose accuracy was judged then,so as to determine whether use of the predictive information to filter.Experimental results showed that this robust method could effectively weaken the influence of motion model error in complex movement environment.
robust Kalman filtering;motion model error;predictive position errors;standardized residuals
2016-02-18
彭月(1989—),女(土家族),四川成都人,讲师,研究方向为测绘、导航等应用。
彭月.一种高效抗差卡尔曼滤波的导航应用[J].导航定位学报,2016,4(4):104-107.(PENG Yue.Application of an efficient robust Kalman filtering in navigation[J].Journal of Navigation and Positioning,2016,4(4):104-107.)
10.16547/j.cnki.10-1096.20160420.
P228
A
2095-4999(2016)04-0104-04
