一种智能餐厅的设计
2017-01-04龚天祥鱼小涛蒋潇轩鲁晓东芦立娟张继军
任 微,龚天祥,鱼小涛,蒋潇轩,鲁晓东,芦立娟,张继军
(浙江海洋大学东海科学技术学院,浙江 舟山 316000)
一种智能餐厅的设计
任 微,龚天祥,鱼小涛,蒋潇轩,鲁晓东,芦立娟*,张继军
(浙江海洋大学东海科学技术学院,浙江 舟山 316000)
利用3Dmax仿真设计了一种智能机器人餐厅,并利用单片机等进行实物制作,来实现控制直流电机正反转实现载盘的升降和其它功能的智能餐厅。
3Dmax 智能机器人餐厅 单片机 实物制作 智能餐厅
近年来,中国普通劳动力的工资呈现了上涨趋势,尤其是从事第三产业的人均工资的增长速度高于全国水平,面对劳动力成本的增加,市场上许多从事第三产业的行业,如餐厅等,因目前大多的是非智能化服务,需要大量的人力,就使经济效益相对减少。故设计了一种由机器人部分的代替人工服务的智能餐厅以减少人力需求,降低餐厅的成本,增加经济效益,具体设计如下:
1 餐厅流程
如图1所示:顾客进门后只需找到空餐桌坐下,根据显示屏上的提示进行点餐(点餐结束后显示屏上显示消费金额),被选中的菜肴菜单显示在厨房总显示系统的显示屏上,厨师根据厨房内显示屏上的提示准备菜肴将菜肴放入在载盘内,盖上防尘盖扣上卡扣,按动载盘上的数字键选定相应的餐桌。导轨安装在天花板上,直流电机工作驱动滑轮使载盘上升至轨道入口,并控制工形车轮在导轨上移动使机器人到达用餐顾客桌子所对应的正上方,驱动滑轮带动载盘下降至与桌同高的小平台上, 载盘与底部接触触动按钮,卡扣和防尘罩打开,顾客可自行拿出菜肴享用。享用完美食后,可点击二维码进行支付,或用支付宝进行支付,支付后会吐出相应的收据单,或前往前台支付现金。顾客凭借手的收据单出门。
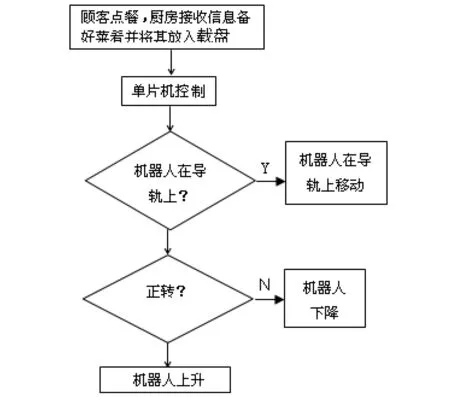
图1 总流程
2 餐厅结构:分为固定和移动两部分
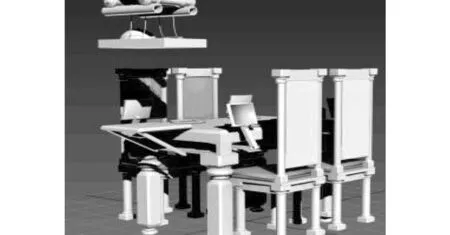
2.1 固定部分
固定在天花板上的椭圆轨道、餐桌(载盘降落平台、点餐系统、支付系统)如图2所示:

图二(1)

图二(2)
图二(3)
图二(4)图2 固定部分结构图
2.1.1 椭圆轨道
基于轨道火车的轨道能够承受着多变化的垂直、横向、纵向的静荷载和动荷载。而荷载从钢轨通过轨枕和道床传递到路基。通过力学理论,在各种荷载条件下进行分析轨道各组成部分所能承载的能力及稳定性。轨道力学分析轨道结构在机车车辆作用下的受力和变形,以及轨道结构对轨道破坏及列车运行的影响,为设计轨道结构,制定轨道管理标准提供依据。在此我们将轨道固定在天花板上,一方面为了减少了空间的消耗同时也减少了在长期使用过程中对导轨的损耗。根据重力的原理导轨与主动轮可以很好的契合。导轨的起点和终点都设定在厨房。轨道为椭圆,这样可以绕餐厅一圈回到厨房,实现自动化如图2(1)所示。
2.1.2 餐桌
餐桌安放在轨道的正下方,与轨道平行。保证每个餐桌与轨道的距离基本相等如图,按照特定的设计将餐桌椅分别摆放在特定位置,让机器人能准确到达每个餐桌上。其中包括:载盘降落平台,原理是根据三角形的稳定性在桌旁边固定降落平台,如图2(2) 所示:点餐系统:原理是桌子四角 装有显示屏,顾客根据自己的喜好自行点餐,选好菜后点击确认按钮,菜单会通过线路传输到厨房显示屏,如图2(3)所示:支付系统:原理是顾客享受完菜肴后,点击桌子旁的显示屏对用餐满意度进行评价,查看自己的用餐费用。付款采用多种方式,顾客可以在显示屏上点击选择二维码支付,支付宝支付或前台现金支付,支付后会吐出相应的收据单,如图2(4)所示。
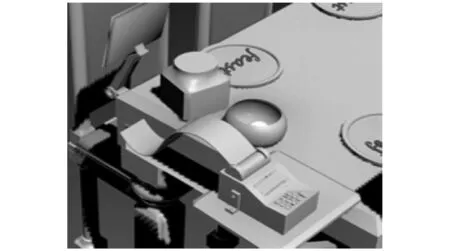
2.2 移动部分
主体系统(机器人、载盘和充电装置)、升降系统的设计;
2.2.1 机器人
圆柱椭圆线形导轨与工字形车轮,通过直流电机控制使主体移动,如图3(1)所示:载盘设计:载盘与升降系统连接。向载盘上放置菜肴时服务员自行盖上防尘罩和卡扣。防尘罩减少灰尘对菜肴的影响,卡扣固定菜肴在载盘中的固定位置。下降到与小平台接触时就能触动开关自动打开防尘罩以及卡扣,以便顾客取下菜肴,载盘系统通过压力传感器(减少到设置的重量)时,伸缩架自动上升并返回指定待命,如图3(2)所示:充电装置:充电装置安放在轨道运行平台上面,在这里我们选择用蓄电池为直流电机供电,蓄电池是化学能转换成电能的一种装置,因为它可以实现再充电,可以防止直流电机运行中突然没有电的情况。我们选择在厨房安装插座,当空闲时,蓄电池就可以与插座想连接进行充电,防止出现电量不足情况,如图3(3)所示:
2.2.2 升降系统设计
原理是在已知椭圆轨道到载盘降落平台距离,载盘的伸缩采用直流电机控制滑轮组,直流电机里边固定有环状永磁体,电流通过转子上的线圈产生安培力,当转子上的线圈与磁场平行时,再继续转受到的磁场方向将改变,因此此时转子末端的电刷跟转换片交替接触,从而线圈上的电流方向也改变,产生的洛伦兹力方向不变,所以电机能保持一个方向转动。

图3(1)
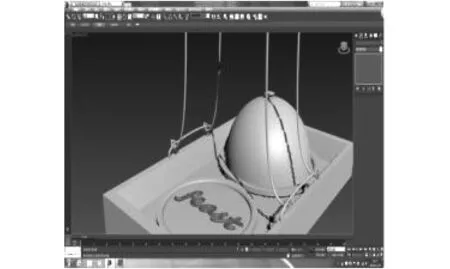
图3(2)
图3(3)

图3(4)图3 移动部分结构图
我们利用单片机控制直流电机实现正反转使滑轮正旋和反旋,当到底指定位置时,直流电机进行正旋,滑轮组工作,将载盘从导轨上面按稳定的速度降下来,到底平台上方时,直流电机停止转动,滑轮组停止运动,载盘接触底部,罩子打开,顾客可以取菜肴。一定时间后直流电机反旋,滑轮组工作使载盘上升。通过控制齿轮转动的圈数使载盘准确到达降落平台,实现升降,如图3(4)所示:
3 技术路线图
如图4所示。
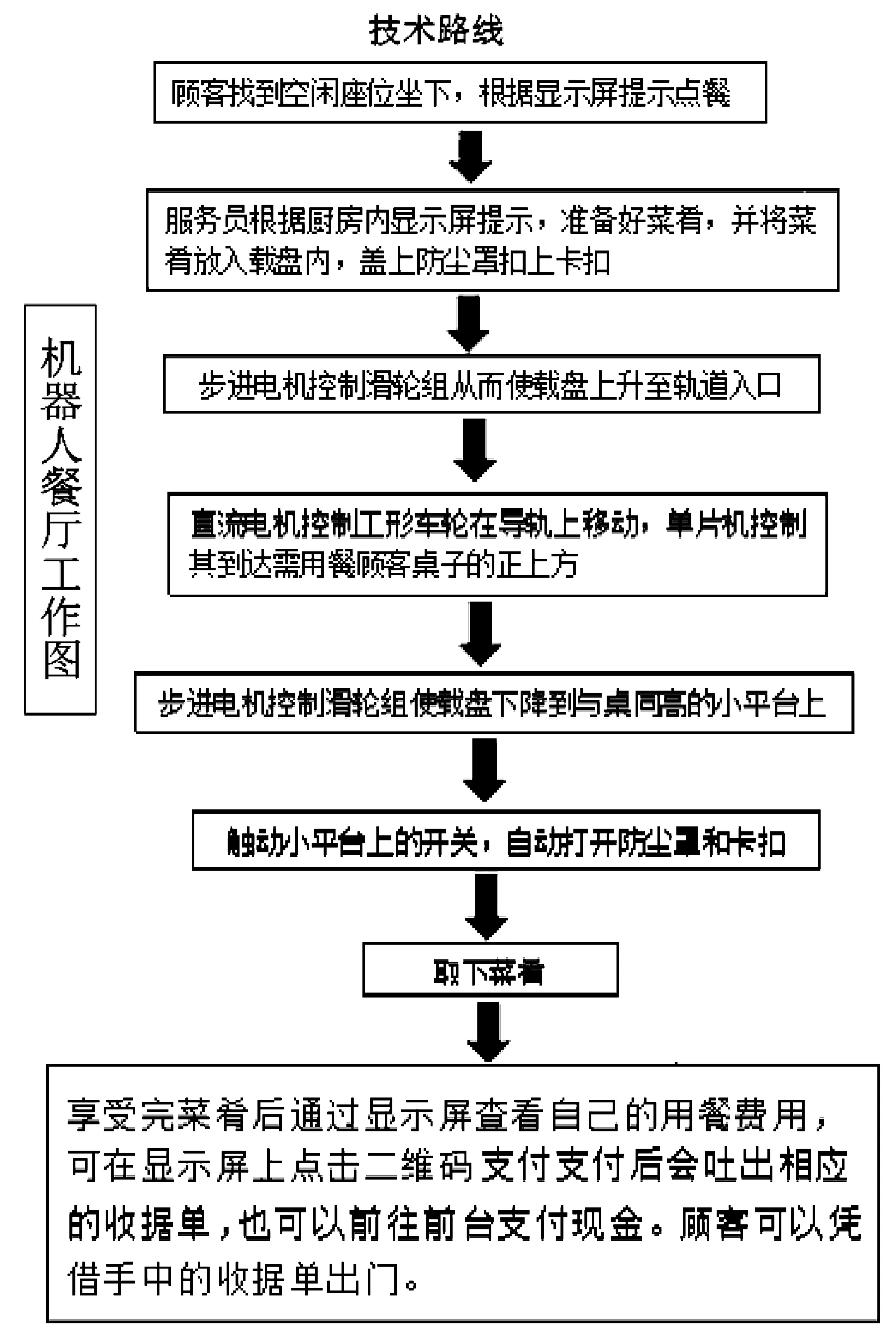
图4 技术路线图
4 电路图
如图5所示。
5 3Dmax制图相关说明
3d建模使用的3dmax,主要参考主创的构思并略加改进以增进其美观度,并且通过对多面体的加角加线添加涡轮平滑效果以达到曲面细分的效果,为了防止曲面破碎,应在多面体中添加约束线。其他具体日常物体参考日常实物进行建模。

图5 直流电机电路图
6 结 论
设计能够部分的利用智能化设备,有效的减少人力需求,相对降低餐厅的成本,增加效益,可为其他餐厅实现智能化提供参考。
大数据的应用,顾客就餐后在网上进行支付时会留下相应的消费数据,可以对消费数据进行汇总分析得出每个顾客的爱好,根据其爱好推出个性化的优惠,吸引顾客经常消费。
[1] 徐晶.王国余.大学物理实验分层次教学与创新能力的培养[J].大学物理实验,2013,26(2):94-96.
[2] 朱国斌.利用DISLab进行弹簧振子简谐运动实验条件的研究.物理实验[J].2011,6(20):26-28.
[3] 柯红卫.有质量弹簧的振动与弹性力.大学物理[J].2013,5(15):17-18.
[4] 胡汉才.单片机原理及系统设计[M].北京:清华大学出版社.
[5] 楼然苗,李光飞.51系列单片机设计实例[M].北京:北京航空航天大学出版社.
[6] 韩雪,阎焜,等.基于STC89C52单片机的测速计设计[J].大学物理实验,2015(3):66-69.
Design of a Smart Restaurant
REN Wei,GONG Tian-xiang,YU Xiao-tao,JIANG Xiao-xuan,LU Xiao-dong LU Li-juan,ZHANG Ji-jun
(Zhejiang Ocean University,Donghai Science and Tecnological College,Zhejiang Zhoushan 316000)
It introduces a kind of intelligent android restaurant,which is based on the reversing of the Direct Current motor to realize multiple function.The machine was designed by using 3Ds max modeling,and realized by utilizing single chip microcomputer and other.
3Dmax;intelligent robot restaurant;single chip microcomputer;physical production;smart restaurant
2016-06-07
1007-2934(2016)06-0086-04
O 4-33
A
10.14139/j.cnki.cn22-1228.2016.006.023
*通讯联系人
